Hello,
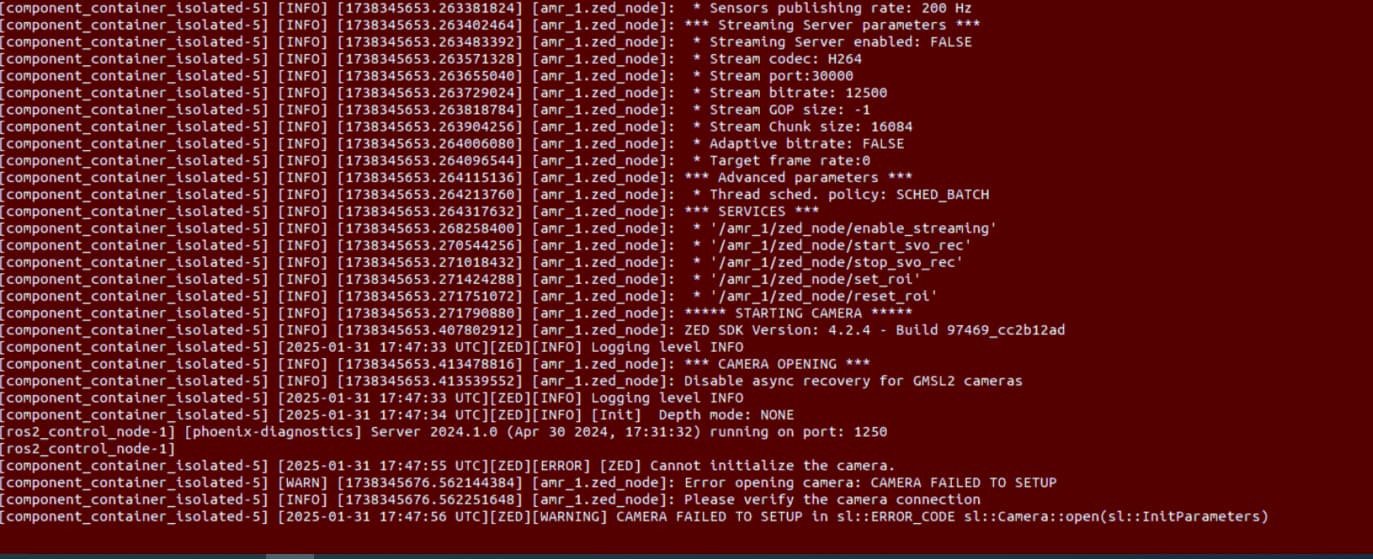
Currently running ZED SDK Version: 4.2.4 - Build 97469_cc2b12ad and latest ROS2 branch build from master, while trying to open ZEDX camera with SVGA @60FPS from Explorer or ROS driver, the camera opening fails, other FPS modes, its fine.
Also question, can GMSL camera’s firmware be upgraded too ? If so, how ?
Myzhar
January 31, 2025, 4:50pm
2
Hi @anath93
anath93:
Currently running ZED SDK Version: 4.2.4 - Build 97469_cc2b12ad and latest ROS2 branch build from master, while trying to open ZEDX camera with SVGA @60FPS from Explorer or ROS driver, the camera opening fails, other FPS modes, its fine.
Can you post the error message that you get?
There’s no updated firmware for the ZED X camera available.
Hi @Myzhar There is no error on terminal or kernel side of dmesg just the Explorer never loads or on ROS side it says CAMERA OPENING ERROR only with SVGA @60 FPS, other than that all other modes have no issues.
My suggestion, please do bench test if possible.
Myzhar
January 31, 2025, 5:28pm
4
Please post the console log
Myzhar
January 31, 2025, 5:53pm
6
Hi @anath93
I’ve just tested and it works as expected:
[INFO] [launch]: All log files can be found below /home/user/.ros/log/2025-01-31-18-51-13-253894-ubuntu-16401
[INFO] [launch]: Default logging verbosity is set to INFO
Using common configuration file: /home/user/devel/ros2/ros2_ws/install/zed_wrapper/share/zed_wrapper/config/common_stereo.yaml
[INFO] [robot_state_publisher-1]: process started with pid [16414]
[INFO] [component_container_isolated-2]: process started with pid [16416]
[robot_state_publisher-1] [INFO] [1738345873.671132444] [zed.zed_state_publisher]: got segment zed_camera_center
[robot_state_publisher-1] [INFO] [1738345873.671265885] [zed.zed_state_publisher]: got segment zed_camera_link
[robot_state_publisher-1] [INFO] [1738345873.671285501] [zed.zed_state_publisher]: got segment zed_left_camera_frame
[robot_state_publisher-1] [INFO] [1738345873.671295581] [zed.zed_state_publisher]: got segment zed_left_camera_optical_frame
[robot_state_publisher-1] [INFO] [1738345873.671303677] [zed.zed_state_publisher]: got segment zed_right_camera_frame
[robot_state_publisher-1] [INFO] [1738345873.671311261] [zed.zed_state_publisher]: got segment zed_right_camera_optical_frame
[component_container_isolated-2] [INFO] [1738345873.897859561] [zed.zed_container]: Load Library: /home/user/devel/ros2/ros2_ws/install/zed_components/lib/libzed_camera_component.so
[component_container_isolated-2] [INFO] [1738345874.116706519] [zed.zed_container]: Found class: rclcpp_components::NodeFactoryTemplate<stereolabs::ZedCamera>
[component_container_isolated-2] [INFO] [1738345874.116815416] [zed.zed_container]: Instantiate class: rclcpp_components::NodeFactoryTemplate<stereolabs::ZedCamera>
[component_container_isolated-2] [INFO] [1738345874.217043323] [zed.zed_node]: ********************************
[component_container_isolated-2] [INFO] [1738345874.217132444] [zed.zed_node]: ZED Camera Component
[component_container_isolated-2] [INFO] [1738345874.217146492] [zed.zed_node]: ********************************
[component_container_isolated-2] [INFO] [1738345874.217157596] [zed.zed_node]: * namespace: /zed
[component_container_isolated-2] [INFO] [1738345874.217167644] [zed.zed_node]: * node name: zed_node
[component_container_isolated-2] [INFO] [1738345874.217176764] [zed.zed_node]: ********************************
[INFO] [launch_ros.actions.load_composable_nodes]: Loaded node '/zed/zed_node' in container '/zed/zed_container'
[component_container_isolated-2] [INFO] [1738345874.267444158] [zed.zed_node]: *** DEBUG parameters ***
[component_container_isolated-2] [INFO] [1738345874.267731679] [zed.zed_node]: * SDK Verbose: 1
[component_container_isolated-2] [INFO] [1738345874.267830688] [zed.zed_node]: * Debug Common: FALSE
[component_container_isolated-2] [INFO] [1738345874.267917184] [zed.zed_node]: * Debug Simulation: FALSE
[component_container_isolated-2] [INFO] [1738345874.268007456] [zed.zed_node]: * Debug Video/Depth: FALSE
[component_container_isolated-2] [INFO] [1738345874.268080449] [zed.zed_node]: * Debug Control settings: FALSE
[component_container_isolated-2] [INFO] [1738345874.268148833] [zed.zed_node]: * Debug Point Cloud: FALSE
[component_container_isolated-2] [INFO] [1738345874.268208865] [zed.zed_node]: * Debug GNSS: FALSE
[component_container_isolated-2] [INFO] [1738345874.268265025] [zed.zed_node]: * Debug Positional Tracking: FALSE
[component_container_isolated-2] [INFO] [1738345874.268326146] [zed.zed_node]: * Debug sensors: FALSE
[component_container_isolated-2] [INFO] [1738345874.268384034] [zed.zed_node]: * Debug Mapping: FALSE
[component_container_isolated-2] [INFO] [1738345874.268445794] [zed.zed_node]: * Debug Object Detection: FALSE
[component_container_isolated-2] [INFO] [1738345874.268499650] [zed.zed_node]: * Debug Body Tracking: FALSE
[component_container_isolated-2] [INFO] [1738345874.268558562] [zed.zed_node]: * Debug Streaming: FALSE
[component_container_isolated-2] [INFO] [1738345874.268618947] [zed.zed_node]: * Debug ROI: FALSE
[component_container_isolated-2] [INFO] [1738345874.268679427] [zed.zed_node]: * Debug Advanced: FALSE
[component_container_isolated-2] [INFO] [1738345874.268764771] [zed.zed_node]: *** GENERAL parameters ***
[component_container_isolated-2] [INFO] [1738345874.268950084] [zed.zed_node]: * Camera model: zedx - ZED X
[component_container_isolated-2] [INFO] [1738345874.269022180] [zed.zed_node]: * Camera name: zed
[component_container_isolated-2] [INFO] [1738345874.269085732] [zed.zed_node]: * Camera SN: 0
[component_container_isolated-2] [INFO] [1738345874.269151749] [zed.zed_node]: * Camera timeout [sec]: 5
[component_container_isolated-2] [INFO] [1738345874.269213093] [zed.zed_node]: * Camera reconnection temptatives: 5
[component_container_isolated-2] [INFO] [1738345874.269275077] [zed.zed_node]: * Camera framerate: 60
[component_container_isolated-2] [INFO] [1738345874.269328677] [zed.zed_node]: * GPU ID: -1
[component_container_isolated-2] [INFO] [1738345874.269437350] [zed.zed_node]: * Camera resolution: SVGA
[component_container_isolated-2] [INFO] [1738345874.269507846] [zed.zed_node]: * Publishing resolution: CUSTOM
[component_container_isolated-2] [INFO] [1738345874.269601702] [zed.zed_node]: * Publishing downscale factor: 2
[component_container_isolated-2] [INFO] [1738345874.269664487] [zed.zed_node]: * OpenCV custom calibration:
[component_container_isolated-2] [INFO] [1738345874.269726119] [zed.zed_node]: * Camera self calibration: TRUE
[component_container_isolated-2] [INFO] [1738345874.269781991] [zed.zed_node]: * Camera flip: FALSE
[component_container_isolated-2] [INFO] [1738345874.269847975] [zed.zed_node]: * [DYN] Publish framerate [Hz]: 15
[component_container_isolated-2] [INFO] [1738345874.269866183] [zed.zed_node]: *** VIDEO parameters ***
[component_container_isolated-2] [INFO] [1738345874.269929224] [zed.zed_node]: * [DYN] Saturation: 4
[component_container_isolated-2] [INFO] [1738345874.269988424] [zed.zed_node]: * [DYN] Sharpness: 4
[component_container_isolated-2] [INFO] [1738345874.270046664] [zed.zed_node]: * [DYN] Gamma: 8
[component_container_isolated-2] [INFO] [1738345874.270107720] [zed.zed_node]: * [DYN] Auto Exposure/Gain: TRUE
[component_container_isolated-2] [INFO] [1738345874.270165481] [zed.zed_node]: * [DYN] Exposure: 80
[component_container_isolated-2] [INFO] [1738345874.270231689] [zed.zed_node]: * [DYN] Gain: 80
[component_container_isolated-2] [INFO] [1738345874.270288969] [zed.zed_node]: * [DYN] Auto White Balance: TRUE
[component_container_isolated-2] [INFO] [1738345874.270349417] [zed.zed_node]: * [DYN] White Balance Temperature: 42
[component_container_isolated-2] [INFO] [1738345874.270408874] [zed.zed_node]: * [DYN] ZED X Exposure time: 16000
[component_container_isolated-2] [INFO] [1738345874.270470890] [zed.zed_node]: * [DYN] ZED X Auto Exp. time range min: 28
[component_container_isolated-2] [INFO] [1738345874.270530858] [zed.zed_node]: * [DYN] ZED X Auto Exp. time range max: 30000
[component_container_isolated-2] [INFO] [1738345874.270590218] [zed.zed_node]: * [DYN] ZED X Exposure comp.: 50
[component_container_isolated-2] [INFO] [1738345874.270729195] [zed.zed_node]: * [DYN] ZED X Analog Gain: 1255
[component_container_isolated-2] [INFO] [1738345874.270796363] [zed.zed_node]: * [DYN] ZED X Auto Analog Gain range min: 1000
[component_container_isolated-2] [INFO] [1738345874.270855915] [zed.zed_node]: * [DYN] ZED X Auto Analog Gain range max: 16000
[component_container_isolated-2] [INFO] [1738345874.270916940] [zed.zed_node]: * [DYN] ZED X Digital Gain: 1
[component_container_isolated-2] [INFO] [1738345874.270975724] [zed.zed_node]: * [DYN] ZED X Auto Digital Gain range min: 1
[component_container_isolated-2] [INFO] [1738345874.271037388] [zed.zed_node]: * [DYN] ZED X Auto Digital Gain range max: 256
[component_container_isolated-2] [INFO] [1738345874.271092684] [zed.zed_node]: * [DYN] ZED X Auto Digital Gain range max: 50
[component_container_isolated-2] [INFO] [1738345874.271113004] [zed.zed_node]: *** DEPTH parameters ***
[component_container_isolated-2] [INFO] [1738345874.271197325] [zed.zed_node]: * Depth mode: NEURAL [4]
[component_container_isolated-2] [INFO] [1738345874.271266669] [zed.zed_node]: * Min depth [m]: 0.3
[component_container_isolated-2] [INFO] [1738345874.271338701] [zed.zed_node]: * Max depth [m]: 10
[component_container_isolated-2] [INFO] [1738345874.271405005] [zed.zed_node]: * Depth Stabilization: 1
[component_container_isolated-2] [INFO] [1738345874.271465966] [zed.zed_node]: * OpenNI mode (16bit point cloud): FALSE
[component_container_isolated-2] [INFO] [1738345874.271530958] [zed.zed_node]: * [DYN] Point cloud rate [Hz]: 5
[component_container_isolated-2] [INFO] [1738345874.271594094] [zed.zed_node]: * [DYN] Depth Confidence: 50
[component_container_isolated-2] [INFO] [1738345874.271661486] [zed.zed_node]: * [DYN] Depth Texture Confidence: 100
[component_container_isolated-2] [INFO] [1738345874.271723183] [zed.zed_node]: * [DYN] Remove saturated areas: TRUE
[component_container_isolated-2] [INFO] [1738345874.271742671] [zed.zed_node]: *** GNSS FUSION parameters ***
[component_container_isolated-2] [INFO] [1738345874.271812655] [zed.zed_node]: * GNSS fusion enabled: FALSE
[component_container_isolated-2] [INFO] [1738345874.271834031] [zed.zed_node]: *** POSITIONAL TRACKING parameters ***
[component_container_isolated-2] [INFO] [1738345874.271888143] [zed.zed_node]: * Positional tracking enabled: TRUE
[component_container_isolated-2] [INFO] [1738345874.271962128] [zed.zed_node]: * Positional tracking mode: GEN 1
[component_container_isolated-2] [INFO] [1738345874.272086640] [zed.zed_node]: * Map frame id: map
[component_container_isolated-2] [INFO] [1738345874.272150992] [zed.zed_node]: * Odometry frame id: odom
[component_container_isolated-2] [INFO] [1738345874.272218449] [zed.zed_node]: * Broadcast Odometry TF: TRUE
[component_container_isolated-2] [INFO] [1738345874.272276913] [zed.zed_node]: * Broadcast Pose TF: TRUE
[component_container_isolated-2] [INFO] [1738345874.272340721] [zed.zed_node]: * [DYN] Depth minimum range: 0
[component_container_isolated-2] [INFO] [1738345874.272397649] [zed.zed_node]: * [DYN] TF timestamp offset: 0
[component_container_isolated-2] [INFO] [1738345874.272454321] [zed.zed_node]: * [DYN] Path publishing rate: 2
[component_container_isolated-2] [INFO] [1738345874.272514418] [zed.zed_node]: * Path history lenght: -1
[component_container_isolated-2] [INFO] [1738345874.272579282] [zed.zed_node]: * Initial pose: [0,0,0,0,0,0,]
[component_container_isolated-2] [INFO] [1738345874.272648818] [zed.zed_node]: * Area Memory: TRUE
[component_container_isolated-2] [INFO] [1738345874.272702546] [zed.zed_node]: * Area Memory DB:
[component_container_isolated-2] [INFO] [1738345874.272765011] [zed.zed_node]: * Camera is static: FALSE
[component_container_isolated-2] [INFO] [1738345874.272822355] [zed.zed_node]: * Gravity as origin [not for ZED]: TRUE
[component_container_isolated-2] [INFO] [1738345874.272884851] [zed.zed_node]: * IMU Fusion [not for ZED]: TRUE
[component_container_isolated-2] [INFO] [1738345874.272940723] [zed.zed_node]: * Floor Alignment: FALSE
[component_container_isolated-2] [INFO] [1738345874.273001076] [zed.zed_node]: * Reset Odometry with Loop Closure: TRUE
[component_container_isolated-2] [INFO] [1738345874.273059412] [zed.zed_node]: * 2D mode: FALSE
[component_container_isolated-2] [INFO] [1738345874.273079316] [zed.zed_node]: *** Region of Interest parameters ***
[component_container_isolated-2] [INFO] [1738345874.273140436] [zed.zed_node]: * Automatic ROI generation: FALSE
[component_container_isolated-2] [INFO] [1738345874.273246773] [zed.zed_node]: * Manual ROI polygon: []
[component_container_isolated-2] [INFO] [1738345874.273272661] [zed.zed_node]: *** SENSORS STACK parameters ***
[component_container_isolated-2] [INFO] [1738345874.273327285] [zed.zed_node]: * Broadcast IMU TF [not for ZED]: TRUE
[component_container_isolated-2] [INFO] [1738345874.273382837] [zed.zed_node]: * Sensors Camera Sync: FALSE
[component_container_isolated-2] [INFO] [1738345874.273447605] [zed.zed_node]: * Sensors publishing rate: 200 Hz
[component_container_isolated-2] [INFO] [1738345874.273493046] [zed.zed_node]: *** Spatial Mapping parameters ***
[component_container_isolated-2] [INFO] [1738345874.273552470] [zed.zed_node]: * Spatial Mapping Enabled: FALSE
[component_container_isolated-2] [INFO] [1738345874.273623926] [zed.zed_node]: * Spatial Mapping resolution [m]: 0.05
[component_container_isolated-2] [INFO] [1738345874.273685974] [zed.zed_node]: * 3D Max Mapping range [m]: 5
[component_container_isolated-2] [INFO] [1738345874.273751095] [zed.zed_node]: * Map publishing rate [Hz]: 1
[component_container_isolated-2] [INFO] [1738345874.273806583] [zed.zed_node]: * Clicked point topic: /clicked_point
[component_container_isolated-2] [INFO] [1738345874.273918551] [zed.zed_node]: * Plane Det. Max Dist. Thresh.: 0.15
[component_container_isolated-2] [INFO] [1738345874.273976247] [zed.zed_node]: * Plane Det. Normals Sim. Thresh.: 15
[component_container_isolated-2] [INFO] [1738345874.274002199] [zed.zed_node]: *** Object Det. parameters ***
[component_container_isolated-2] [INFO] [1738345874.274058456] [zed.zed_node]: * Object Det. enabled: FALSE
[component_container_isolated-2] [INFO] [1738345874.274146456] [zed.zed_node]: * Object Det. model: MULTI CLASS BOX FAST
[component_container_isolated-2] [INFO] [1738345874.274215128] [zed.zed_node]: * Object Det. allow reduced precision: TRUE
[component_container_isolated-2] [INFO] [1738345874.274286969] [zed.zed_node]: * Object Det. maximum range [m]: 20
[component_container_isolated-2] [INFO] [1738345874.274350105] [zed.zed_node]: * Object Det. min. confidence: 75
[component_container_isolated-2] [INFO] [1738345874.274409817] [zed.zed_node]: * Object Det. prediction timeout [sec]: 0.5
[component_container_isolated-2] [INFO] [1738345874.274474457] [zed.zed_node]: * Object Det. tracking: TRUE
[component_container_isolated-2] [INFO] [1738345874.274544058] [zed.zed_node]: * Object Filtering mode: 1 - NMS3D
[component_container_isolated-2] [INFO] [1738345874.274624378] [zed.zed_node]: * MultiClassBox people: TRUE
[component_container_isolated-2] [INFO] [1738345874.274686298] [zed.zed_node]: * MultiClassBox vehicles: TRUE
[component_container_isolated-2] [INFO] [1738345874.274751930] [zed.zed_node]: * MultiClassBox bags: TRUE
[component_container_isolated-2] [INFO] [1738345874.274807099] [zed.zed_node]: * MultiClassBox animals: TRUE
[component_container_isolated-2] [INFO] [1738345874.274869851] [zed.zed_node]: * MultiClassBox electronics: TRUE
[component_container_isolated-2] [INFO] [1738345874.274925723] [zed.zed_node]: * MultiClassBox fruits and vegetables: TRUE
[component_container_isolated-2] [INFO] [1738345874.274987611] [zed.zed_node]: * MultiClassBox sport-related objects: TRUE
[component_container_isolated-2] [INFO] [1738345874.275007771] [zed.zed_node]: *** Body Track. parameters ***
[component_container_isolated-2] [INFO] [1738345874.275061788] [zed.zed_node]: * Body Track. enabled: FALSE
[component_container_isolated-2] [INFO] [1738345874.275144092] [zed.zed_node]: * Body Track. model: HUMAN BODY MEDIUM
[component_container_isolated-2] [INFO] [1738345874.275254204] [zed.zed_node]: * Body Track. format: BODY 38
[component_container_isolated-2] [INFO] [1738345874.275360861] [zed.zed_node]: * Body Track. allow reduced precision: TRUE
[component_container_isolated-2] [INFO] [1738345874.275425213] [zed.zed_node]: * Body Track. maximum range [m]: 20
[component_container_isolated-2] [INFO] [1738345874.275490205] [zed.zed_node]: * Body Track. KP selection: FULL
[component_container_isolated-2] [INFO] [1738345874.275560894] [zed.zed_node]: * Body fitting: FALSE
[component_container_isolated-2] [INFO] [1738345874.275631934] [zed.zed_node]: * Body joints tracking: TRUE
[component_container_isolated-2] [INFO] [1738345874.275712830] [zed.zed_node]: * Body Track. prediction timeout [sec]: 0.5
[component_container_isolated-2] [INFO] [1738345874.275775966] [zed.zed_node]: * Body Track. confidence thresh.: 50
[component_container_isolated-2] [INFO] [1738345874.275843775] [zed.zed_node]: * Body Track. min. KP thresh.: 5
[component_container_isolated-2] [INFO] [1738345874.275864543] [zed.zed_node]: *** Streaming Server parameters ***
[component_container_isolated-2] [INFO] [1738345874.275921151] [zed.zed_node]: * Streaming Server enabled: FALSE
[component_container_isolated-2] [INFO] [1738345874.276000191] [zed.zed_node]: * Stream codec: H264
[component_container_isolated-2] [INFO] [1738345874.276066111] [zed.zed_node]: * Stream port:30000
[component_container_isolated-2] [INFO] [1738345874.276141792] [zed.zed_node]: * Stream bitrate: 12500
[component_container_isolated-2] [INFO] [1738345874.276200416] [zed.zed_node]: * Stream GOP size: -1
[component_container_isolated-2] [INFO] [1738345874.276264576] [zed.zed_node]: * Stream Chunk size: 16084
[component_container_isolated-2] [INFO] [1738345874.276321376] [zed.zed_node]: * Adaptive bitrate: FALSE
[component_container_isolated-2] [INFO] [1738345874.276384513] [zed.zed_node]: * Target frame rate:0
[component_container_isolated-2] [INFO] [1738345874.276435713] [zed.zed_node]: *** Advanced parameters ***
[component_container_isolated-2] [INFO] [1738345874.276491585] [zed.zed_node]: * Thread sched. policy: SCHED_BATCH
[component_container_isolated-2] [INFO] [1738345874.276627842] [zed.zed_node]: *** SERVICES ***
[component_container_isolated-2] [INFO] [1738345874.277435109] [zed.zed_node]: * '/zed/zed_node/reset_odometry'
[component_container_isolated-2] [INFO] [1738345874.277717606] [zed.zed_node]: * '/zed/zed_node/reset_pos_tracking'
[component_container_isolated-2] [INFO] [1738345874.278964331] [zed.zed_node]: * '/zed/zed_node/set_pose'
[component_container_isolated-2] [INFO] [1738345874.279318828] [zed.zed_node]: * '/zed/zed_node/enable_obj_det'
[component_container_isolated-2] [INFO] [1738345874.279588941] [zed.zed_node]: * '/zed/zed_node/enable_body_trk'
[component_container_isolated-2] [INFO] [1738345874.279842606] [zed.zed_node]: * '/zed/zed_node/enable_mapping'
[component_container_isolated-2] [INFO] [1738345874.280110319] [zed.zed_node]: * '/zed/zed_node/enable_streaming'
[component_container_isolated-2] [INFO] [1738345874.280424976] [zed.zed_node]: * '/zed/zed_node/start_svo_rec'
[component_container_isolated-2] [INFO] [1738345874.280642161] [zed.zed_node]: * '/zed/zed_node/stop_svo_rec'
[component_container_isolated-2] [INFO] [1738345874.280897778] [zed.zed_node]: * '/zed/zed_node/set_roi'
[component_container_isolated-2] [INFO] [1738345874.281178835] [zed.zed_node]: * '/zed/zed_node/reset_roi'
[component_container_isolated-2] [INFO] [1738345874.281240787] [zed.zed_node]: ***** STARTING CAMERA *****
[component_container_isolated-2] [INFO] [1738345874.413369490] [zed.zed_node]: ZED SDK Version: 4.2.3 - Build 97114_3a82169a
[component_container_isolated-2] [2025-01-31 17:51:14 UTC][ZED][INFO] Logging level INFO
[component_container_isolated-2] [INFO] [1738345874.416452414] [zed.zed_node]: *** CAMERA OPENING ***
[component_container_isolated-2] [INFO] [1738345874.416501855] [zed.zed_node]: Disable async recovery for GMSL2 cameras
[component_container_isolated-2] [2025-01-31 17:51:14 UTC][ZED][INFO] Logging level INFO
[component_container_isolated-2] [2025-01-31 17:51:15 UTC][ZED][INFO] [Init] Depth mode: NEURAL
[component_container_isolated-2] [2025-01-31 17:51:16 UTC][ZED][INFO] [Init] Camera FW version: 2001
[component_container_isolated-2] [2025-01-31 17:51:16 UTC][ZED][INFO] [Init] Video mode: SVGA@60
[component_container_isolated-2] [2025-01-31 17:51:16 UTC][ZED][INFO] [Init] Serial Number: S/N 45734258
[component_container_isolated-2] [2025-01-31 17:51:16 UTC][ZED][WARNING] [Init] Self-calibration failed. Point the camera towards a more textured and brighter area. Avoid objects closer than 1 meter (Error code: 0x02)
[component_container_isolated-2] [INFO] [1738345877.946922034] [zed.zed_node]: ZED SDK running on GPU #0
[component_container_isolated-2] [INFO] [1738345877.947037491] [zed.zed_node]: * Camera Model -> ZED X
[component_container_isolated-2] [INFO] [1738345877.947054035] [zed.zed_node]: * Serial Number -> 45734258
[component_container_isolated-2] [INFO] [1738345877.947076371] [zed.zed_node]: * Focal Lenght -> 0.998913 mm
[component_container_isolated-2] [INFO] [1738345877.947099795] [zed.zed_node]: * Input -> GMSL
Myzhar
January 31, 2025, 5:53pm
7
[component_container_isolated-2] [INFO] [1738345877.947116499] [zed.zed_node]: * Camera FW Version -> 2001
[component_container_isolated-2] [INFO] [1738345877.947137651] [zed.zed_node]: * Sensors FW Version -> 1000
[component_container_isolated-2] [INFO] [1738345877.947153203] [zed.zed_node]: * Camera grab frame size -> 960x600
[component_container_isolated-2] [INFO] [1738345877.947163923] [zed.zed_node]: * Publishing frame size -> 480x300
[component_container_isolated-2] [INFO] [1738345877.947188019] [zed.zed_node]: *** TF FRAMES ***
[component_container_isolated-2] [INFO] [1738345877.947206451] [zed.zed_node]: * Map -> map
[component_container_isolated-2] [INFO] [1738345877.947217651] [zed.zed_node]: * Odometry -> odom
[component_container_isolated-2] [INFO] [1738345877.947226515] [zed.zed_node]: * Base -> zed_camera_link
[component_container_isolated-2] [INFO] [1738345877.947235315] [zed.zed_node]: * Camera -> zed_camera_center
[component_container_isolated-2] [INFO] [1738345877.947244147] [zed.zed_node]: * Left -> zed_left_camera_frame
[component_container_isolated-2] [INFO] [1738345877.947253075] [zed.zed_node]: * Left Optical -> zed_left_camera_optical_frame
[component_container_isolated-2] [INFO] [1738345877.947261971] [zed.zed_node]: * RGB -> zed_left_camera_frame
[component_container_isolated-2] [INFO] [1738345877.947270003] [zed.zed_node]: * RGB Optical -> zed_left_camera_optical_frame
[component_container_isolated-2] [INFO] [1738345877.947278227] [zed.zed_node]: * Right -> zed_right_camera_frame
[component_container_isolated-2] [INFO] [1738345877.947286163] [zed.zed_node]: * Right Optical -> zed_right_camera_optical_frame
[component_container_isolated-2] [INFO] [1738345877.947294580] [zed.zed_node]: * Depth -> zed_left_camera_frame
[component_container_isolated-2] [INFO] [1738345877.947302260] [zed.zed_node]: * Depth Optical -> zed_left_camera_optical_frame
[component_container_isolated-2] [INFO] [1738345877.947310772] [zed.zed_node]: * Point Cloud -> zed_left_camera_optical_frame
[component_container_isolated-2] [INFO] [1738345877.947318868] [zed.zed_node]: * Disparity -> zed_left_camera_frame
[component_container_isolated-2] [INFO] [1738345877.947335412] [zed.zed_node]: * Disparity Optical -> zed_left_camera_optical_frame
[component_container_isolated-2] [INFO] [1738345877.947344788] [zed.zed_node]: * Confidence -> zed_left_camera_frame
[component_container_isolated-2] [INFO] [1738345877.947352948] [zed.zed_node]: * Confidence Optical -> zed_left_camera_optical_frame
[component_container_isolated-2] [INFO] [1738345877.947361396] [zed.zed_node]: * IMU -> zed_imu_link
[component_container_isolated-2] [INFO] [1738345877.947400148] [zed.zed_node]: *** PUBLISHED TOPICS ***
[component_container_isolated-2] [INFO] [1738345878.514951399] [FFMPEGEncoder]: enc: libx264 prof: preset:
[component_container_isolated-2] [INFO] [1738345878.515005927] [FFMPEGEncoder]: qmax: 0 bitrate: 4194304 gop: 10
[component_container_isolated-2] [INFO] [1738345878.535497910] [zed.zed_node]: Advertised on topic: /zed/zed_node/rgb/image_rect_color
[component_container_isolated-2] [INFO] [1738345878.535582838] [zed.zed_node]: Advertised on topic: /zed/zed_node/rgb/camera_info
[component_container_isolated-2] [INFO] [1738345878.536881595] [FFMPEGEncoder]: enc: libx264 prof: preset:
[component_container_isolated-2] [INFO] [1738345878.536923643] [FFMPEGEncoder]: qmax: 0 bitrate: 4194304 gop: 10
[component_container_isolated-2] [INFO] [1738345878.538874051] [zed.zed_node]: Advertised on topic: /zed/zed_node/rgb_gray/image_rect_gray
[component_container_isolated-2] [INFO] [1738345878.538939747] [zed.zed_node]: Advertised on topic: /zed/zed_node/rgb_gray/camera_info
[component_container_isolated-2] [INFO] [1738345878.539951079] [FFMPEGEncoder]: enc: libx264 prof: preset:
[component_container_isolated-2] [INFO] [1738345878.540002439] [FFMPEGEncoder]: qmax: 0 bitrate: 4194304 gop: 10
[component_container_isolated-2] [INFO] [1738345878.540991339] [zed.zed_node]: Advertised on topic: /zed/zed_node/rgb_raw/image_raw_color
[component_container_isolated-2] [INFO] [1738345878.541038667] [zed.zed_node]: Advertised on topic: /zed/zed_node/rgb_raw/camera_info
[component_container_isolated-2] [INFO] [1738345878.541907887] [FFMPEGEncoder]: enc: libx264 prof: preset:
[component_container_isolated-2] [INFO] [1738345878.541932527] [FFMPEGEncoder]: qmax: 0 bitrate: 4194304 gop: 10
[component_container_isolated-2] [INFO] [1738345878.542742482] [zed.zed_node]: Advertised on topic: /zed/zed_node/rgb_raw_gray/image_raw_gray
[component_container_isolated-2] [INFO] [1738345878.542843762] [zed.zed_node]: Advertised on topic: /zed/zed_node/rgb_raw_gray/camera_info
[component_container_isolated-2] [INFO] [1738345878.543697782] [FFMPEGEncoder]: enc: libx264 prof: preset:
[component_container_isolated-2] [INFO] [1738345878.543721622] [FFMPEGEncoder]: qmax: 0 bitrate: 4194304 gop: 10
[component_container_isolated-2] [INFO] [1738345878.544566265] [zed.zed_node]: Advertised on topic: /zed/zed_node/left/image_rect_color
[component_container_isolated-2] [INFO] [1738345878.544605561] [zed.zed_node]: Advertised on topic: /zed/zed_node/left/camera_info
[component_container_isolated-2] [INFO] [1738345878.545417756] [FFMPEGEncoder]: enc: libx264 prof: preset:
[component_container_isolated-2] [INFO] [1738345878.545440380] [FFMPEGEncoder]: qmax: 0 bitrate: 4194304 gop: 10
[component_container_isolated-2] [INFO] [1738345878.546244096] [zed.zed_node]: Advertised on topic: /zed/zed_node/left_gray/image_rect_gray
[component_container_isolated-2] [INFO] [1738345878.546284480] [zed.zed_node]: Advertised on topic: /zed/zed_node/left_gray/camera_info
[component_container_isolated-2] [INFO] [1738345878.547110467] [FFMPEGEncoder]: enc: libx264 prof: preset:
[component_container_isolated-2] [INFO] [1738345878.547132291] [FFMPEGEncoder]: qmax: 0 bitrate: 4194304 gop: 10
[component_container_isolated-2] [INFO] [1738345878.547962630] [zed.zed_node]: Advertised on topic: /zed/zed_node/left_raw/image_raw_color
[component_container_isolated-2] [INFO] [1738345878.548022630] [zed.zed_node]: Advertised on topic: /zed/zed_node/left_raw/camera_info
[component_container_isolated-2] [INFO] [1738345878.548863210] [FFMPEGEncoder]: enc: libx264 prof: preset:
[component_container_isolated-2] [INFO] [1738345878.548886250] [FFMPEGEncoder]: qmax: 0 bitrate: 4194304 gop: 10
[component_container_isolated-2] [INFO] [1738345878.549694893] [zed.zed_node]: Advertised on topic: /zed/zed_node/left_raw_gray/image_raw_gray
[component_container_isolated-2] [INFO] [1738345878.549731405] [zed.zed_node]: Advertised on topic: /zed/zed_node/left_raw_gray/camera_info
[component_container_isolated-2] [INFO] [1738345878.550537680] [FFMPEGEncoder]: enc: libx264 prof: preset:
[component_container_isolated-2] [INFO] [1738345878.550560112] [FFMPEGEncoder]: qmax: 0 bitrate: 4194304 gop: 10
[component_container_isolated-2] [INFO] [1738345878.551385139] [zed.zed_node]: Advertised on topic: /zed/zed_node/right/image_rect_color
[component_container_isolated-2] [INFO] [1738345878.551426388] [zed.zed_node]: Advertised on topic: /zed/zed_node/right/camera_info
[component_container_isolated-2] [INFO] [1738345878.552312407] [FFMPEGEncoder]: enc: libx264 prof: preset:
[component_container_isolated-2] [INFO] [1738345878.552338359] [FFMPEGEncoder]: qmax: 0 bitrate: 4194304 gop: 10
[component_container_isolated-2] [INFO] [1738345878.553177754] [zed.zed_node]: Advertised on topic: /zed/zed_node/right_gray/image_rect_gray
[component_container_isolated-2] [INFO] [1738345878.553215706] [zed.zed_node]: Advertised on topic: /zed/zed_node/right_gray/camera_info
[component_container_isolated-2] [INFO] [1738345878.554041054] [FFMPEGEncoder]: enc: libx264 prof: preset:
[component_container_isolated-2] [INFO] [1738345878.554065118] [FFMPEGEncoder]: qmax: 0 bitrate: 4194304 gop: 10
[component_container_isolated-2] [INFO] [1738345878.555568484] [zed.zed_node]: Advertised on topic: /zed/zed_node/right_raw/image_raw_color
[component_container_isolated-2] [INFO] [1738345878.555626788] [zed.zed_node]: Advertised on topic: /zed/zed_node/right_raw/camera_info
[component_container_isolated-2] [INFO] [1738345878.556677960] [FFMPEGEncoder]: enc: libx264 prof: preset:
[component_container_isolated-2] [INFO] [1738345878.556712520] [FFMPEGEncoder]: qmax: 0 bitrate: 4194304 gop: 10
[component_container_isolated-2] [INFO] [1738345878.558475951] [zed.zed_node]: Advertised on topic: /zed/zed_node/right_raw_gray/image_raw_gray
[component_container_isolated-2] [INFO] [1738345878.558540431] [zed.zed_node]: Advertised on topic: /zed/zed_node/right_raw_gray/camera_info
[component_container_isolated-2] [INFO] [1738345878.559823188] [FFMPEGEncoder]: enc: libx264 prof: preset:
[component_container_isolated-2] [INFO] [1738345878.559861908] [FFMPEGEncoder]: qmax: 0 bitrate: 4194304 gop: 10
[component_container_isolated-2] [INFO] [1738345878.560787736] [zed.zed_node]: Advertised on topic: /zed/zed_node/depth/depth_registered
[component_container_isolated-2] [INFO] [1738345878.560838744] [zed.zed_node]: Advertised on topic: /zed/zed_node/depth/camera_info
[component_container_isolated-2] [INFO] [1738345878.561355258] [zed.zed_node]: Advertised on topic: /zed/zed_node/depth/depth_info
[component_container_isolated-2] [INFO] [1738345878.562243645] [FFMPEGEncoder]: enc: libx264 prof: preset:
[component_container_isolated-2] [INFO] [1738345878.562273726] [FFMPEGEncoder]: qmax: 0 bitrate: 4194304 gop: 10
[component_container_isolated-2] [INFO] [1738345878.563004768] [zed.zed_node]: Advertised on topic: /zed/zed_node/stereo/image_rect_color
[component_container_isolated-2] [INFO] [1738345878.563836452] [FFMPEGEncoder]: enc: libx264 prof: preset:
[component_container_isolated-2] [INFO] [1738345878.563861540] [FFMPEGEncoder]: qmax: 0 bitrate: 4194304 gop: 10
[component_container_isolated-2] [INFO] [1738345878.564583046] [zed.zed_node]: Advertised on topic: /zed/zed_node/stereo_raw/image_raw_color
[component_container_isolated-2] [INFO] [1738345878.564857096] [zed.zed_node]: Advertised on topic: /zed/zed_node/confidence/confidence_map
[component_container_isolated-2] [INFO] [1738345878.566214957] [zed.zed_node]: Advertised on topic: /zed/zed_node/disparity/disparity_image
[component_container_isolated-2] [INFO] [1738345878.593943416] [zed.zed_node]: Advertised on topic: /zed/zed_node/point_cloud/cloud_registered
[component_container_isolated-2] [INFO] [1738345878.594718907] [zed.zed_node]: Advertised on topic: /zed/zed_node/pose
[component_container_isolated-2] [INFO] [1738345878.595279421] [zed.zed_node]: Advertised on topic: /zed/zed_node/pose/status
[component_container_isolated-2] [INFO] [1738345878.595812383] [zed.zed_node]: Advertised on topic: /zed/zed_node/pose_with_covariance
[component_container_isolated-2] [INFO] [1738345878.597119908] [zed.zed_node]: Advertised on topic: /zed/zed_node/odom
[component_container_isolated-2] [INFO] [1738345878.597847623] [zed.zed_node]: Advertised on topic: /zed/zed_node/path_map
[component_container_isolated-2] [INFO] [1738345878.598349001] [zed.zed_node]: Advertised on topic: /zed/zed_node/path_odom
[component_container_isolated-2] [INFO] [1738345878.599596366] [zed.zed_node]: Advertised on topic: /zed/plane_marker
[component_container_isolated-2] [INFO] [1738345878.600237840] [zed.zed_node]: Advertised on topic: /zed/plane
[component_container_isolated-2] [INFO] [1738345878.600745202] [zed.zed_node]: Advertised on topic: /zed/zed_node/imu/data
[component_container_isolated-2] [INFO] [1738345878.601240308] [zed.zed_node]: Advertised on topic: /zed/zed_node/imu/data_raw
[component_container_isolated-2] [INFO] [1738345878.601805046] [zed.zed_node]: Advertised on topic: /zed/zed_node/temperature/imu
[component_container_isolated-2] [INFO] [1738345878.602336856] [zed.zed_node]: Advertised on topic: /zed/zed_node/left_cam_imu_transform
[component_container_isolated-2] [INFO] [1738345878.602384633]
[zed.zed_node]: Camera-IMU Translation:
[component_container_isolated-2] 0 -0.035649 -0.000147
[component_container_isolated-2] [INFO] [1738345878.602436633] [zed.zed_node]: Camera-IMU Rotation:
[component_container_isolated-2] FFFF55FFC6E0
[component_container_isolated-2] 0.999980 -0.004870 0.004063
[component_container_isolated-2] 0.004874 0.999988 -0.000954
[component_container_isolated-2] -0.004058 0.000973 0.999991
[component_container_isolated-2]
[component_container_isolated-2] [INFO] [1738345878.602465721] [zed.zed_node]: *** Subscribers ***
[component_container_isolated-2] [INFO] [1738345878.603219740] [zed.zed_node]: * Plane detection: '/clicked_point'
[component_container_isolated-2] [INFO] [1738345878.726006615] [zed.zed_node]: *** Starting Positional Tracking ***
[component_container_isolated-2] [INFO] [1738345878.726132855] [zed.zed_node]: * Waiting for valid static transformations...
[component_container_isolated-2] [INFO] [1738345878.726272632] [zed.zed_node]: Static transform ref. CMOS Sensor to Base [zed_left_camera_frame -> zed_camera_link]
[component_container_isolated-2] [INFO] [1738345878.726303096] [zed.zed_node]: * Translation: {0.010,-0.060,-0.016}
[component_container_isolated-2] [INFO] [1738345878.726318328] [zed.zed_node]: * Rotation: {0.000,-0.000,0.000}
[component_container_isolated-2] [INFO] [1738345878.726345208] [zed.zed_node]: Static transform ref. CMOS Sensor to Camera Center [zed_left_camera_frame -> zed_camera_center]
[component_container_isolated-2] [INFO] [1738345878.726362104] [zed.zed_node]: * Translation: {0.010,-0.060,0.000}
[component_container_isolated-2] [INFO] [1738345878.726373272] [zed.zed_node]: * Rotation: {0.000,-0.000,0.000}
[component_container_isolated-2] [INFO] [1738345878.726405464] [zed.zed_node]: Static transform Camera Center to Base [zed_camera_center -> zed_camera_link]
[component_container_isolated-2] [INFO] [1738345878.726419192] [zed.zed_node]: * Translation: {0.000,0.000,-0.016}
[component_container_isolated-2] [INFO] [1738345878.726430840] [zed.zed_node]: * Rotation: {0.000,-0.000,0.000}
[component_container_isolated-2] [INFO] [1738345878.727546717] [zed.zed_node]: Initial ZED left camera pose (ZED pos. tracking):
[component_container_isolated-2] [INFO] [1738345878.727602973] [zed.zed_node]: * T: [-0.01,0.06,0.016]
[component_container_isolated-2] [INFO] [1738345878.727643773] [zed.zed_node]: * Q: [0,0,0,1]
What version of the ZED SDK and ZED X Driver are you using?
On the SDK, Version: 4.2.4 - Build 97469_cc2b12adstereolabs -zedlink-duo 1.1.0-LI-MAX96712-L4T36.3.0 arm64 NVIDIA Kernel DTB Modified Package by Stereolabs
I did not see this is lower 4.2.2 SDK or lower than that,
Myzhar
January 31, 2025, 6:27pm
9
Hi @anath93 sudo dpkg --purge stereolabs-zedlink-duo
anath93
January 31, 2025, 6:33pm
10
I do not think its that straight forward for me as per connect tech, I need to build with there sources and stereolabs have provided sources.
For now I think previous SDK version did not had issues, so I will roll back as I do not want to re-image controller.
anath93
January 31, 2025, 7:26pm
11
@Myzhar Downgraded to 4.2.2 and it works as usual.
system
January 31, 2025, 7:27pm
12
@Myzhar Downgraded to 4.2.2 and it works as usual.
[Discourse post]
Myzhar
February 3, 2025, 9:32am
13
anath93:
I do not think its that straight forward for me as per connect tech, I need to build with there sources and stereolabs have provided sources.
For now I think previous SDK version did not had issues, so I will roll back as I do not want to re-image controller.
Are you working with ConnectTech carrier boards? Please always add this type of relevant information when reporting an issue.
If the problem is then related to a ConnectTech product, I recommend you contact their tech support to report it. They will eventually reach out to us to collaborate to fix it if they need our actions.