Hello,
Just curious to see when would be the release for SDK compatible to Jetpack 6 and also ZEDX driver for the same ?
Hello,
Just curious to see when would be the release for SDK compatible to Jetpack 6 and also ZEDX driver for the same ?
Hi @anath93
we are already working on that. The next ZED SDK release will be probably already compatible with JP6.
@Myzhar Is there any release date yet ? Because I am currently on Humble and needs to be deployed to the customer as per there request so just under the pressure to get this out.
I would appreciate if you can please give me some real dates as otherwise I have to switch to different available options soon.
@anath93 please note that JP6 is a developer preview, not ready to be used for final products:
I recommend using Docker to deploy ROS 2 Humble products based on JP5 which is stable and includes security features.
@Myzhar Thank you for that information, you are right about it and I did review release notes before upgrading but my main focus is still top layer Architecture to be where it should be so I still need a time frame for the new SDK and probably the march is there official production release.
@Myzhar My question is still not answered, is there a window you can provide for the new SDK and I dont mean to hold you accountable but just an estimate ?
@anath93 I apologize, but I cannot provide an estimate at the moment.
@Myzhar Is 4.1 release going to be compatible with JP6 ?
Even if not is that going to be soon before this end of month as that lists the feature improvements for reboot and connectivity ?
@anath93 I apologize, but I have no more information than what I already said.
As soon as I have more information, I will post it.
Hello, I am also very interested in running the ZED SDK on ROS Humble on a Jetson AGX Orin with Jetpack 6.
In the meantime, something to try is to run the ZED SDK in a Docker L4T 35.3 (JP 5.1.1) container with ROS Foxy and access the data from outside using ROS. I haven’t tested it yet, but the communication between Foxy and Humble works correctly being one of the two in a Docker container, so with the ZED ROS wrapper it should be possible as well.
Hopefully we will have the new version of the SDK soon and we won’t have to look for workarounds.
Thank you for the effort to develop all the tools you provide.
We are glad to announce that the Stereolabs GMSL2 driver for JP6 GA is now available for downloading.
Full changelog here.
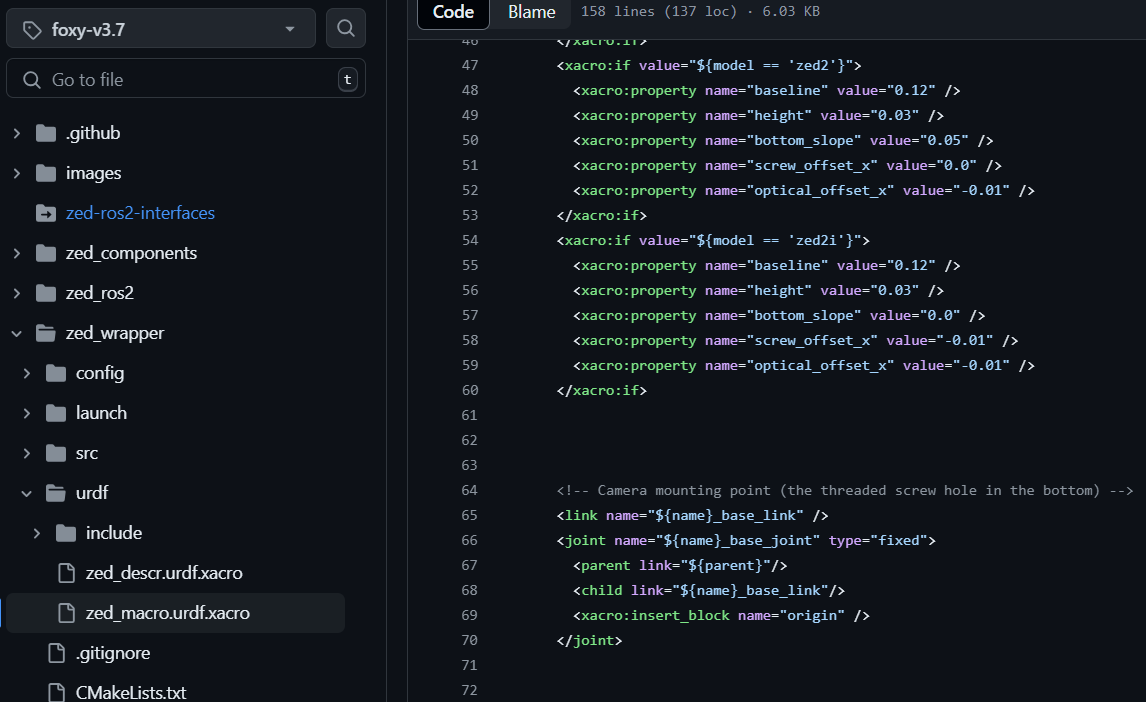
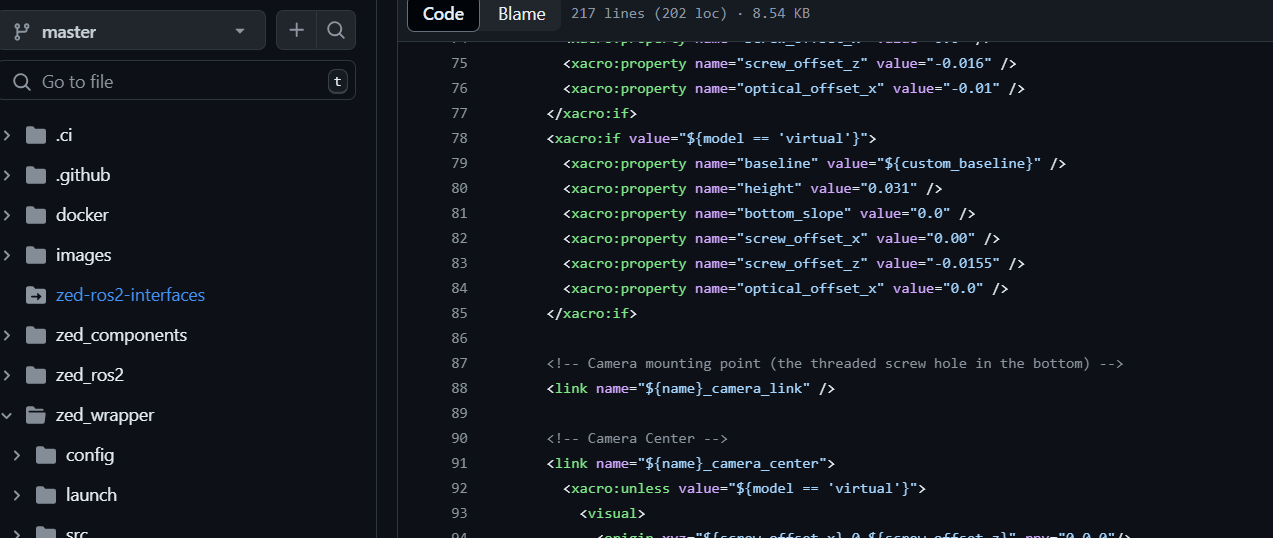
@Myzhar Quick Question, integrating URDF again, is parent argument deprecated ?
Previous Foxy version ;
Current Humble version:
Reason why this is done ?
@anath93 you’re out of topic here. Please create a new thread for new questions.