Hi,
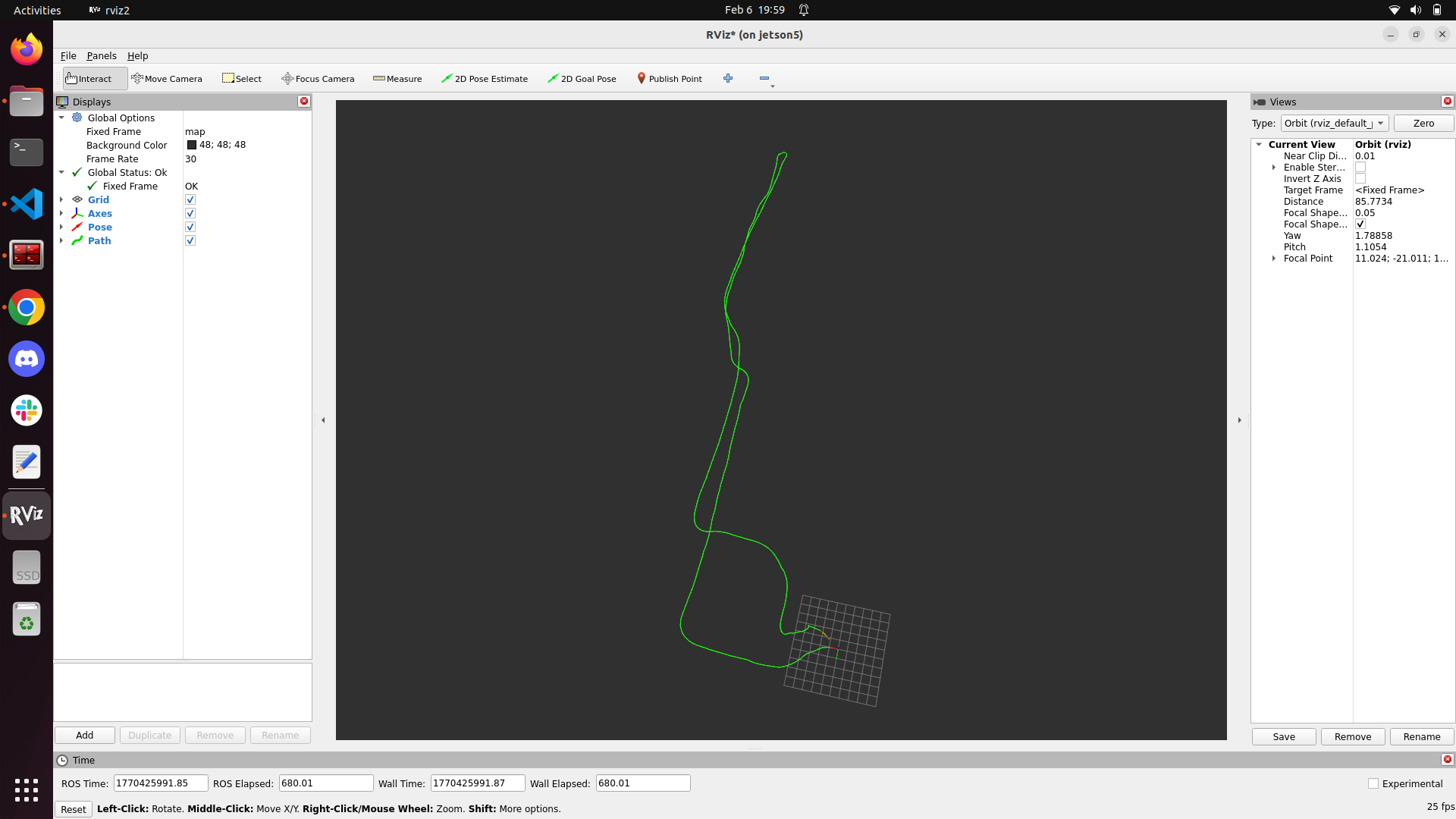
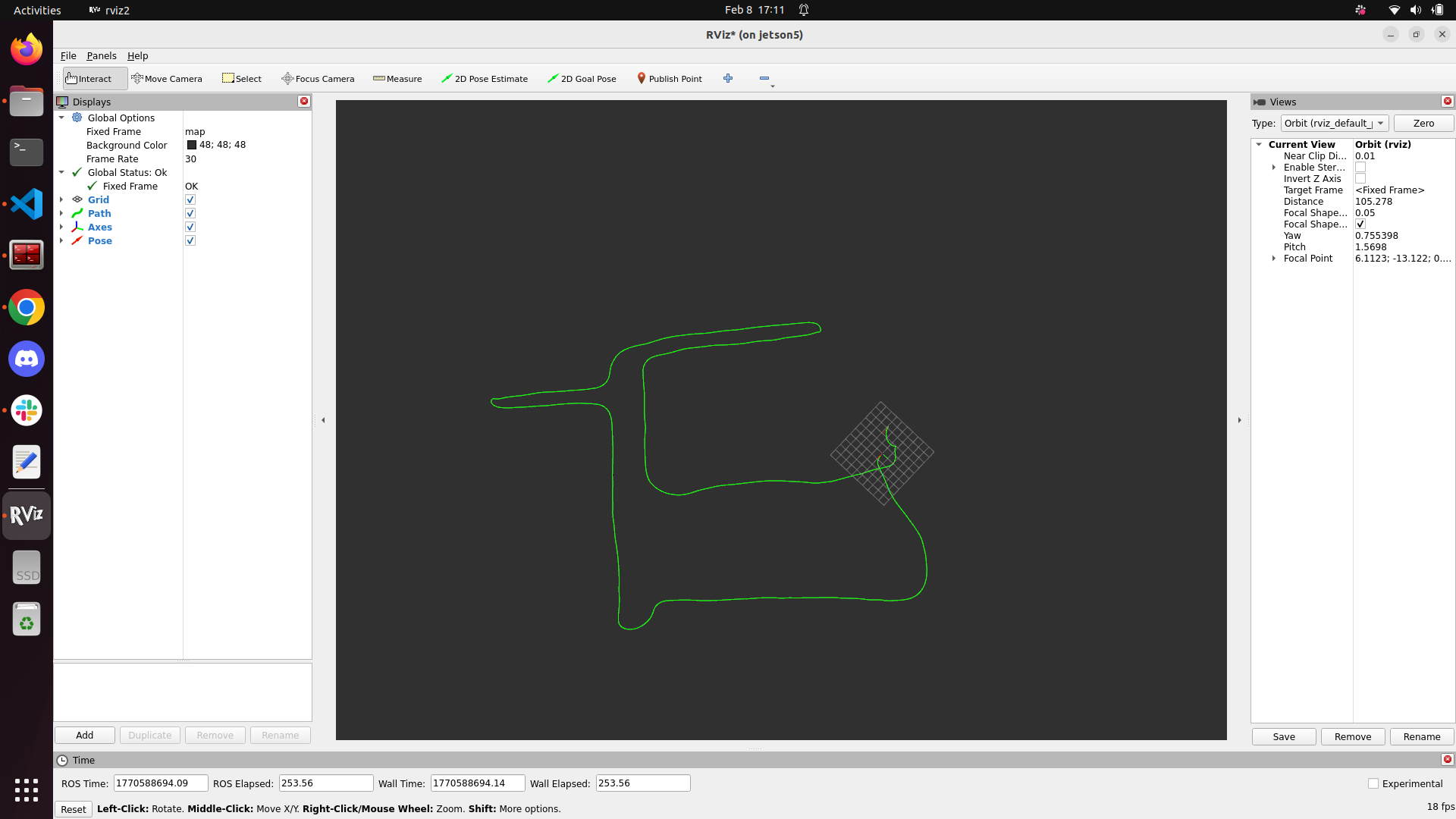
I have been using 5.0.5 for a while with my JetsonOrin NX Jetpack 6.2 and Zed 2i, and it has been working okay with some issues. I updated the SDK to 5.1.2, and it is performing worse. I have attached the params for both cases with results. Please let me know if I am missing something
One more thing to note, when I set 2D mode to true, the pose still moves in the Z axis
Hi Thank you for the response. I’d suggest, in that case, the config file should also select GEN_2 as the default.
Are there any expected release timelines for 5.2 yet?
Thank you for the update, that sounds awesome! I will post the results with GEN_2. Also, can I turn off depth from Neural_light while using GEN_2 or GEN_3?
Hi,
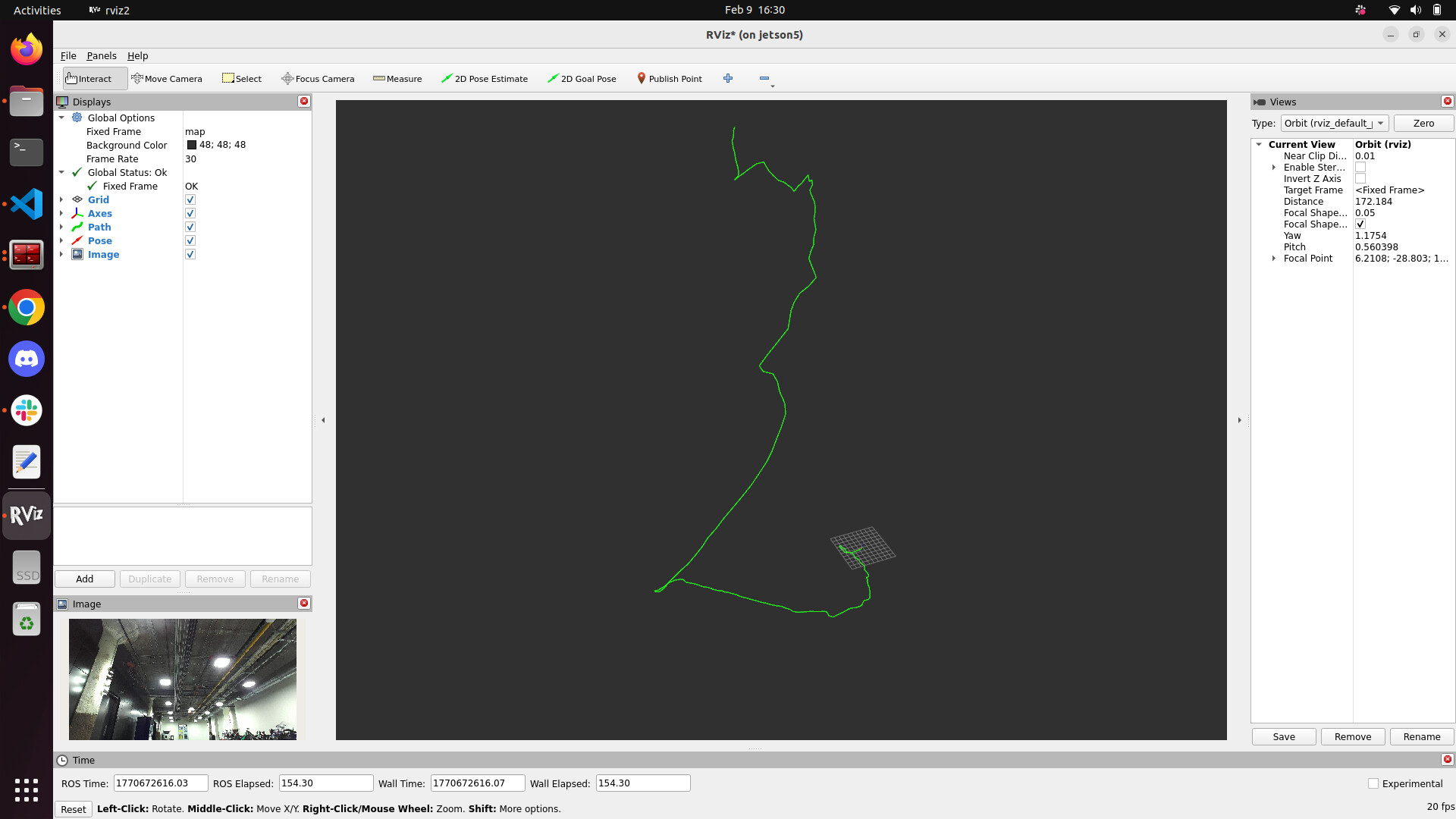
I tested it with minimal params changes, like enabling 2D mod,e and I am getting the below error of lock even if it is moving
[component_container_isolated-2] [WARN] [1770745344.256836531] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 16 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745344.323539017] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 17 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745344.390444393] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 18 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745344.457053563] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 19 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745344.523786131] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 20 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745344.590756278] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 21 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745344.657826813] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 22 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745344.724820096] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 23 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745344.791634492] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 24 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745344.858707299] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 25 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745344.925701127] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 26 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745344.992647177] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 27 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745345.059890265] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 28 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745345.126871677] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 29 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745345.193851137] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 30 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745345.260763810] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 31 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745345.327527356] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 32 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745345.394559746] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 33 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745345.461736175] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 34 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745345.528720724] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 35 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745345.595659702] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 36 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745345.662709501] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 37 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745345.729885962] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 38 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745345.796522302] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 39 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745345.863465761] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 40 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745345.930453829] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 41 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745345.997571983] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 42 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745346.064441135] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 43 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745346.131564123] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 44 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745346.198475292] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 45 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745346.265568039] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 46 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745346.332458407] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 47 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745346.399363561] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 48 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745346.466581945] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 49 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745346.533444280] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 50 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745346.600361882] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 51 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745346.667414339] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 52 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745346.734476107] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 53 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745346.801459025] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 54 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745346.868379379] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 55 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745346.935334487] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 56 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745347.002380735] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 57 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745347.069348228] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 58 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745347.136288200] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 59 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745347.203261101] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 60 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745347.270312951] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 61 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745347.337329982] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 62 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745347.404299971] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 63 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745347.471128610] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 64 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745347.538207373] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 65 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745347.605232149] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 66 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745347.672181145] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 67 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745347.739245315] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 68 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745347.806201800] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 69 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745347.873233008] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 70 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745347.940197653] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 71 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745348.007076758] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 72 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745348.074088479] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 73 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745348.141269007] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 74 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745348.208138288] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 75 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745348.275106806] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 76 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745348.342097598] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 77 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745348.409223371] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 78 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745348.476390203] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 79 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745348.543022225] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 80 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745348.609982391] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 81 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745348.677104677] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 82 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745348.744096492] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 83 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745348.811014064] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 84 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745348.878048281] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 85 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745348.944994398] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 86 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745349.011970949] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 87 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745349.078916619] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 88 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745349.145975766] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 89 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745349.212934301] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 90 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745349.279879299] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 91 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745349.346916333] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 92 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745349.413966040] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 93 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745349.480944224] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 94 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745349.547876517] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 95 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745349.614816619] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 96 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745349.681807123] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 97 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745349.748844862] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 98 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745349.815715744] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 99 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745349.882746186] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 100 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745349.949721042] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 101 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745350.017137710] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 102 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745350.083937262] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 103 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745350.150862708] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 104 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745350.217702710] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 105 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745350.284654045] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 106 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745350.351647654] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 107 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745350.418687090] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 108 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745350.485723069] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 109 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745350.552673508] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 110 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745350.619662157] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 111 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745350.686572978] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 112 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745350.753639647] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 113 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745350.820569317] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 114 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745350.887680148] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 115 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745350.954735680] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 116 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745351.021789196] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 117 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745351.088694866] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 118 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745351.155779904] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 119 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745351.222512414] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 120 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745351.289575500] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 121 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745351.356505299] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 122 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745351.423463963] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 123 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745351.490483590] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 124 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745351.557486993] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 125 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745351.624444057] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 126 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745351.691711376] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 127 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745351.758357802] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 128 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745351.825365237] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 129 frames - Status: MAP_UPDATE
[component_container_isolated-2] [WARN] [1770745351.892350366] [zed.zed_node]: Pos. Track. seems to be locked (pose diff.: 0 m) since 130 frames - Status: MAP_UPDATE
I am using the latest wrapper; the previous one anyway doesn’t work. The behaviour is inconsistent, but sure, I can collect an SVO and share if that helps
jetson5@jetson5:~/fg_ws/src/zed-ros2-wrapper$ git log --oneline -n 10
506e047 (HEAD -> master, tag: v5.2.0, origin/master, origin/HEAD) Merge branch 'add_disable_depth_service'
27e4b95 Update CHANGELOG
1e276de Remove zed_debug from exec dependencies
2a9be04 Update README to clarify zed_debug build skipping
844026b Merge pull request #413 from stereolabs/add_disable_depth_service
fc13a0e Refactor positional tracking logging and error handling for improved clarity
6e61a45 Merge branch 'add_disable_depth_service' of github.com:stereolabs/zed-ros2-wrapper into add_disable_depth_service
10ee512 Apply suggestion from @Copilot
932e8ea Fix formatting of positional tracking mode in diagnostic update
5b345bf Merge branches 'add_disable_depth_service' and 'add_disable_depth_service' of github.com:stereolabs/zed-ros2-wrapper into add_disable_depth_service
When I tried recording the SVO i got the below error
jetson5@jetson5:~$ python zed_recording.py --output_svo_file new_lab_record
Traceback (most recent call last):
File “/home/jetson5/zed_recording.py”, line 22, in
import pyzed.sl as sl
ImportError: /home/jetson5/.local/lib/python3.10/site-packages/pyzed/sl.cpython-310-aarch64-linux-gnu.so: undefined symbol: _ZN2sl9CameraOne8isOpenedEv
I am no expert, so I tried claude and it says
The key finding: the SDK library has _ZNKSt9CameraOne8isOpenedEv (note the K — it’s a const method), but pyzed is looking for _ZN2sl9CameraOne8isOpenedEv (non-const).
Looking more carefully:
Library has: _ZNKSt10...9CameraOne8isOpenedEv — wait let me re-read.
The nm output shows: 0000000001d21a20 T _ZNK2sl9CameraOne8isOpenedEv
The error says:
undefined symbol: _ZN2sl9CameraOne8isOpenedEv
So the mismatch is clear: the library exports a const version of isOpened() but pyzed is trying to link against a non-const version. This points to a genuine ABI incompatibility between pyzed 5.2 and the SDK library on this platform — likely a packaging issue with the pyzed wheel. I should either report this to Stereolabs, try downgrading the SDK, or check if there’s a newer pyzed version that fixes it.
Show more
Done
Found the problem. Look at the symbol difference:
SDK library exports:_ZNK2sl9CameraOne8isOpenedEv (note the K = const method)
This is an ABI mismatch bug in the pyzed 5.2 wheel — it was compiled against a slightly different header where isOpened() wasn’t marked const. This is a Stereolabs bug.
will keep you posted with my findings
edit: with high grab rate i noticed a glitch where the cam stopped streaming and the poses were not being updated without any eorror, will try 720
Yes, this is correct. Higher grab rates improve the performance of the Positional Tracking GEN_3 module.
You can use the publishing rate parameters for depth and images to reduce the system load if you do not need them to be published at the maximum rate.
The Diagnostic information provides details regarding the status of the Positional Tracking module.
Can you post a screenshot of the Runtime Monitor in rqt when the lock happens?
Can I completely disable depth without hurting the accuracy of SLAM, or does SLAM’s accracy depends on Depth’s accuracy, and NEURAL would give more accurate SLAM’s performance compared to NEURAL light?
does grab_resolution: ‘HD1080’ imapct SLAM’s accuracy?
I am having motion blur issues while detecting ARUCO markers on a moving vehicle. How can I change exposure settings to improve it?
Yes, with the ZED SDK v5.2 you can set depth mode to none without affecting the performance of the Positional Tracking module.
No. Normally higher resolutions, if supported by the available computing power, are recommended.
You can set the exposure to manual and fix the value.
Normally, if the vehicle moves quickly, we recommend using the ZED X cameras with Global Shutter CMOS sensors to improve the image stability.
Thanks for the prompt response. If the 5.2 tracking works well for our usecase then I can consider going with a Zed X since that works with a GMSL connector which means getting a Zed BOX or a csi to GMSL link resulting in a expensive upgrade