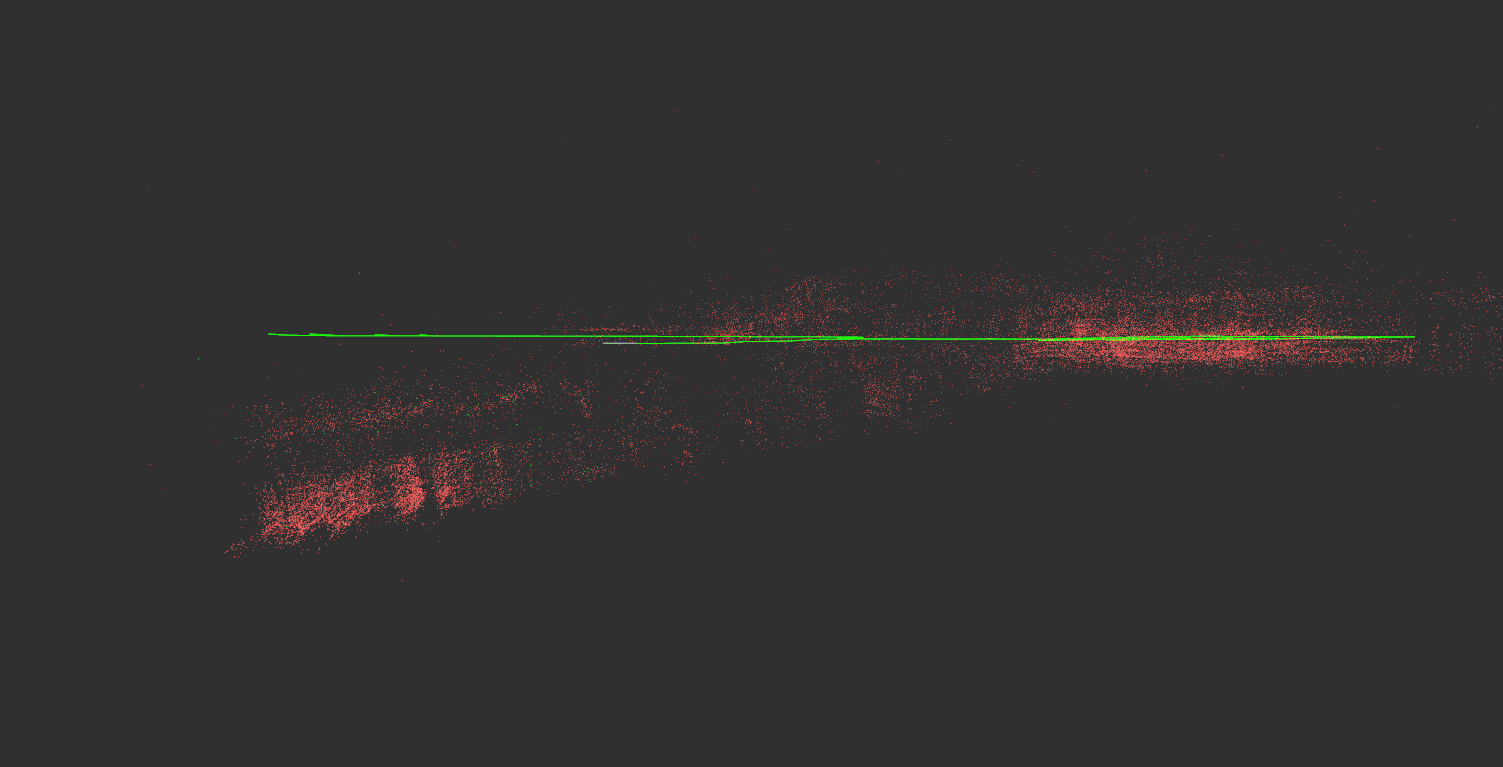
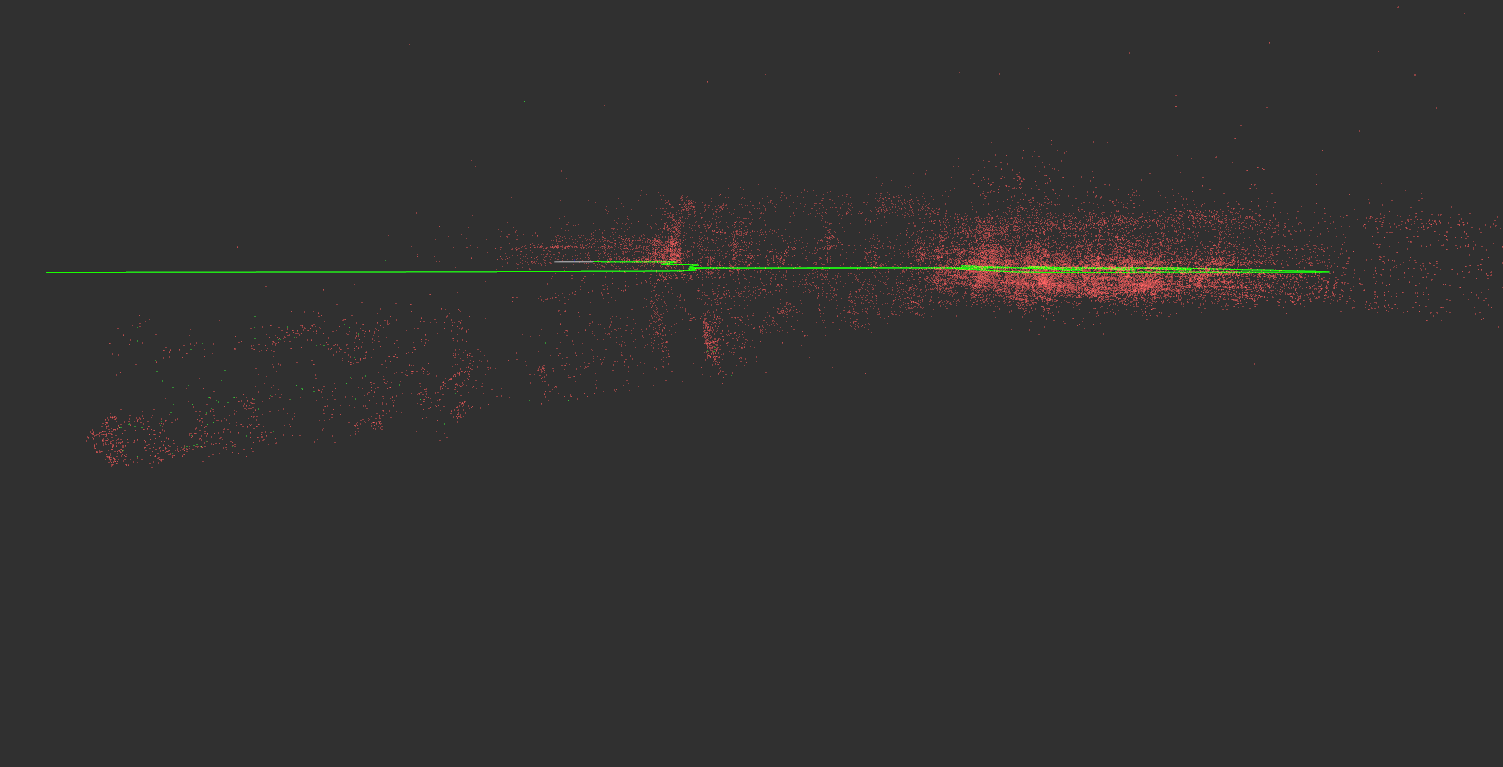
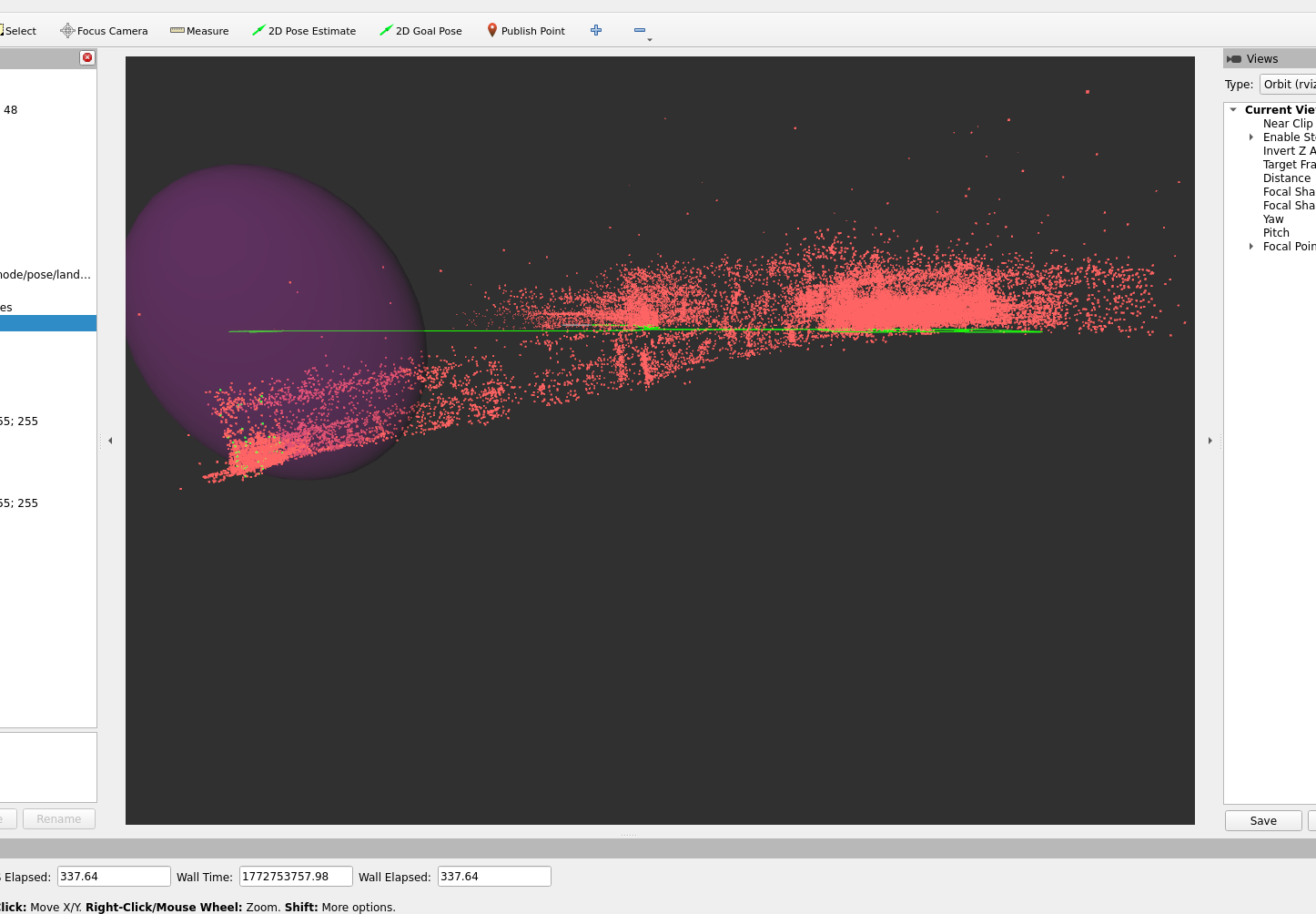
I have been testing SDK 5.2 with my ZED2i and Jetson Orin NX. I enabled 3D landmark visualization and noticed that even when 2D mode is enabled, the 3D landmarks still show accumulated roll and pitch error, as shown in the attached images. This makes me think that 2D mode may currently be setting only the Z axis to 0.
In my view, this may not fully use the ground constraint and could lose useful information. If roll and pitch were constrained in 2D mode, tracking might be more accurate. Is there a way to enforce locking of roll and pitch in 2D mode?
Also, thank you for adding the map visualization. I really appreciate the work.
Please let me know if you need the SVO to understand the issue better
If that’s not the case, then the described behavior is expected because it’s the Wrapper that forces the 2D mode.
Otherwise, it’s a bug because with v5.2 and GEN_3, the SDK is supposed to force the 2D mode for all the data.
looking at the picture, if you notice towards the right, the tracking points are on the correct place, moving towards the left they start dipping, which makes me think, its probably not a data integrity or visualization issue, i think that even in 2D mode the SLAM caclulates the roll and pitch which leads to error accumulation, as noted earlier ideally in 2D mode, it should lock roll and pitch to avoid error accumulation and might imrove overall accracy, thats just my guess, please share your thoughts