hi,
I’m trying to follow the tutorial here to config ROS2 on Jetson AGX Orin Dev Kit
Installation of ROS2 and ZED ROS2 wrapper were successful.
When I try to run the rviz example on new ZED 2i camera using following cli
ros2 launch zed_display_rviz2 display_zed2i.launch.py
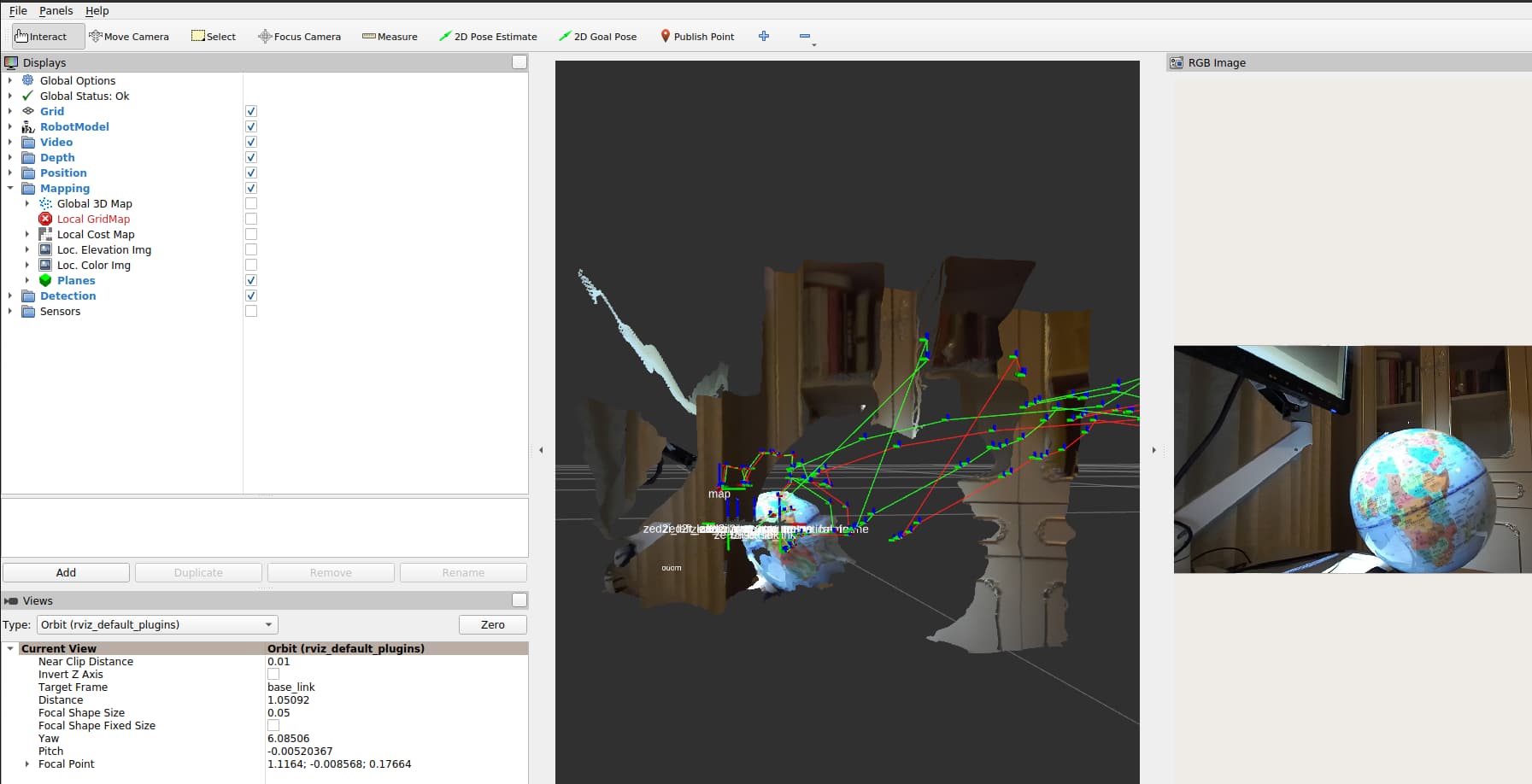
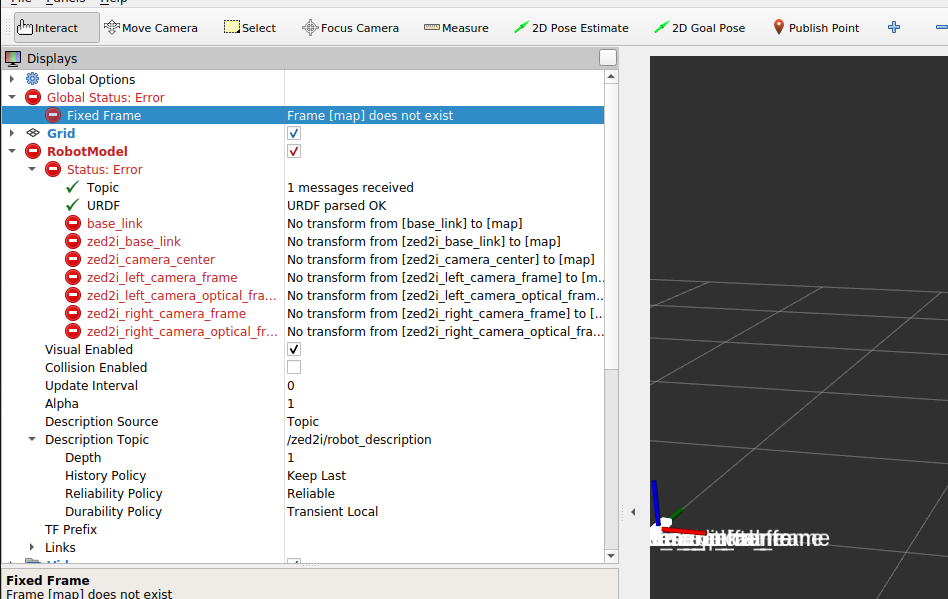
Rviz launched with error, see screen grab
Error in the terminal:
[zed_wrapper-3] 1685969951.245337512 [zed2.zed_node] [INFO] ***** STARTING CAMERA *****
[zed_wrapper-3] 1685969951.245352808 [zed2.zed_node] [INFO] ZED SDK Version: 4.0.3 - Build 72471_a14c21bc
[zed_wrapper-3] 1685969951.248521215 [zed2.zed_node] [INFO] *** CAMERA OPENING ***
[rviz2-1] 1685969952.056706918 [rviz2] [INFO] Stereo is NOT SUPPORTED
[rviz2-1] 1685969952.057105481 [rviz2] [INFO] OpenGl version: 4.6 (GLSL 4.6)
[rviz2-1] 1685969952.110045326 [rviz2] [INFO] Stereo is NOT SUPPORTED
[rviz2-1] 1685969952.196258118 [rviz2] [ERROR] PluginlibFactory: The plugin for class 'grid_map_rviz_plugin/GridMap' failed to load. Error: According to the loaded plugin descriptions the class grid_map_rviz_plugin/GridMap with base class type rviz_common::Display does not exist. Declared types are rviz_default_plugins/Axes rviz_default_plugins/Camera rviz_default_plugins/FluidPressure rviz_default_plugins/Grid rviz_default_plugins/GridCells rviz_default_plugins/Illuminance rviz_default_plugins/Image rviz_default_plugins/InteractiveMarkers rviz_default_plugins/LaserScan rviz_default_plugins/Map rviz_default_plugins/Marker rviz_default_plugins/MarkerArray rviz_default_plugins/Odometry rviz_default_plugins/Path rviz_default_plugins/PointCloud rviz_default_plugins/PointCloud2 rviz_default_plugins/PointStamped rviz_default_plugins/Polygon rviz_default_plugins/Pose rviz_default_plugins/PoseArray rviz_default_plugins/PoseWithCovariance rviz_default_plugins/Range rviz_default_plugins/RelativeHumidity rviz_default_plugins/RobotModel rviz_default_plugins/TF rviz_default_plugins/Temperature rviz_default_plugins/Wrench rviz_plugin_zed_od/ZedOdDisplay
[rviz2-1] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
Did I miss some configuration?