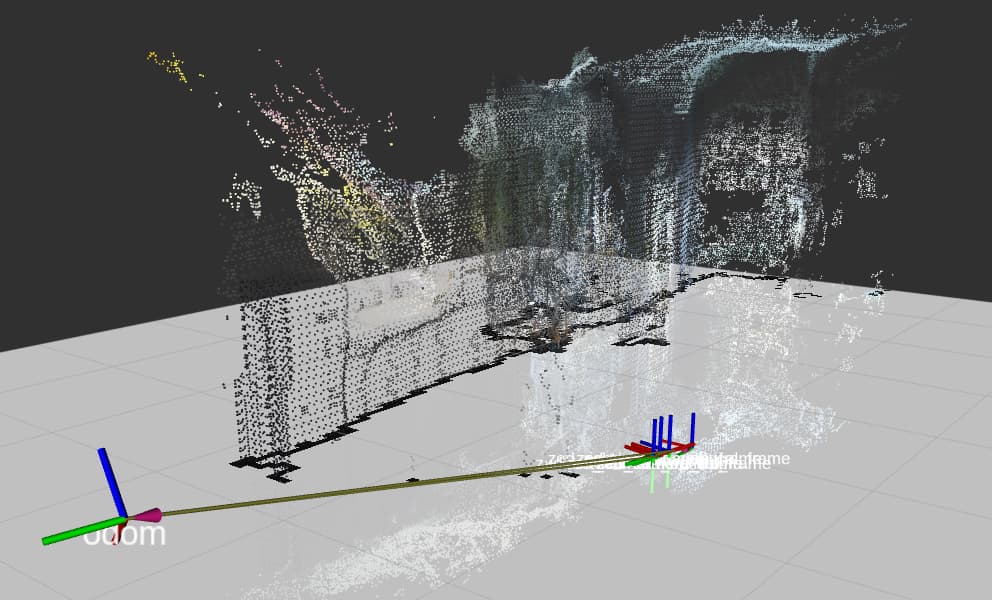
In my ros2 project, currently visualizing my Zed2 camera’s position over time in Rviz and also mapping the surrounding scene. Even when I just gently move the camera around a bit, the odom frame and the camera frames just seem to fly around chaotically. I can confirm that the IMU topic is publishing good data, and I believe all of my camera params should be set fine (Here they are). Is it the camera localization algorithms that are lacking, or am I doing something wrong?
Any thoughts?