hi here, i got this when using zedx:
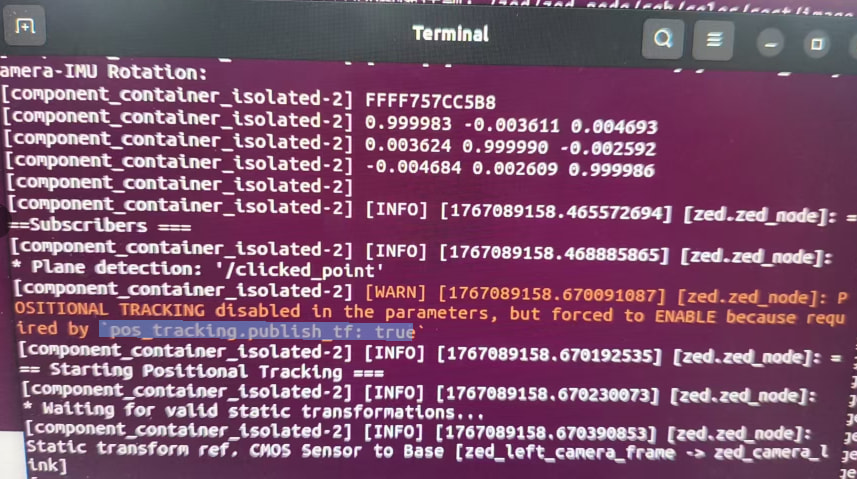
Phenomenon: The ROS2 wrapper reports a WARNING: “POSITIONAL TRACKING disabled in the parameters, but forced to ENABLE because required by ‘pos_tracking.publish_tf:true’.” However, in my configuration file, pos_tracking.publish_tf is set to false. I tried explicitly declaring the parameter publish_tf:=false in the wrapper startup script, and the warning disappeared. However, there is no data in the image topic afterwards.
Configuration: The ZED X camera is connected to the Jetson Orin NX via Link Mono. The system is Ubuntu 22.04, and image data is published using the official ZED ROS2 wrapper.
I would like to know the reason for this issue.