qiran
January 8, 2026, 2:22pm
1
hi here, i got this when using zedx:
Phenomenon: The ROS2 wrapper reports a WARNING: “POSITIONAL TRACKING disabled in the parameters, but forced to ENABLE because required by ‘pos_tracking.publish_tf:true’.” However, in my configuration file, pos_tracking.publish_tf is set to false. I tried explicitly declaring the parameter publish_tf:=false in the wrapper startup script, and the warning disappeared. However, there is no data in the image topic afterwards.
Configuration: The ZED X camera is connected to the Jetson Orin NX via Link Mono. The system is Ubuntu 22.04, and image data is published using the official ZED ROS2 wrapper.
I would like to know the reason for this issue.
Myzhar
January 8, 2026, 2:24pm
2
Hi @qiran Stereolabs community.
How did you check this? Using rviz2 or something other?
qiran
January 8, 2026, 2:59pm
3
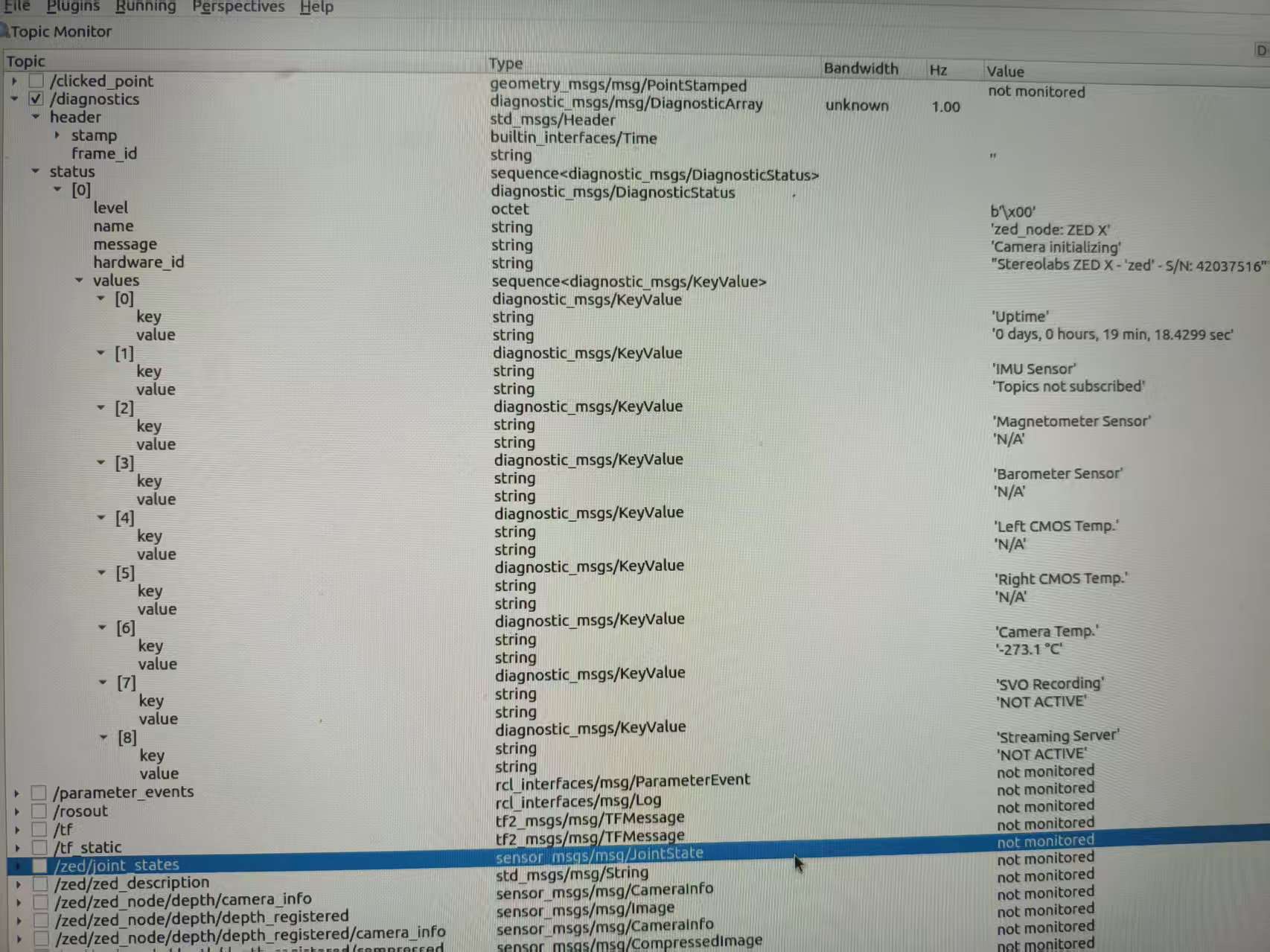
rqt, rviz2, even”ros2 topic echo”, no data was shown up
Myzhar
January 8, 2026, 3:36pm
4
Please start the node (post the command you use), then open rqt and take a screenshot of the runtime monitor:
qiran
January 9, 2026, 2:50am
5
ros2 launch zed_wrapper zed_camera.launch.py camera_model:=zedx publish_tf:=false
Myzhar
January 9, 2026, 8:15am
6
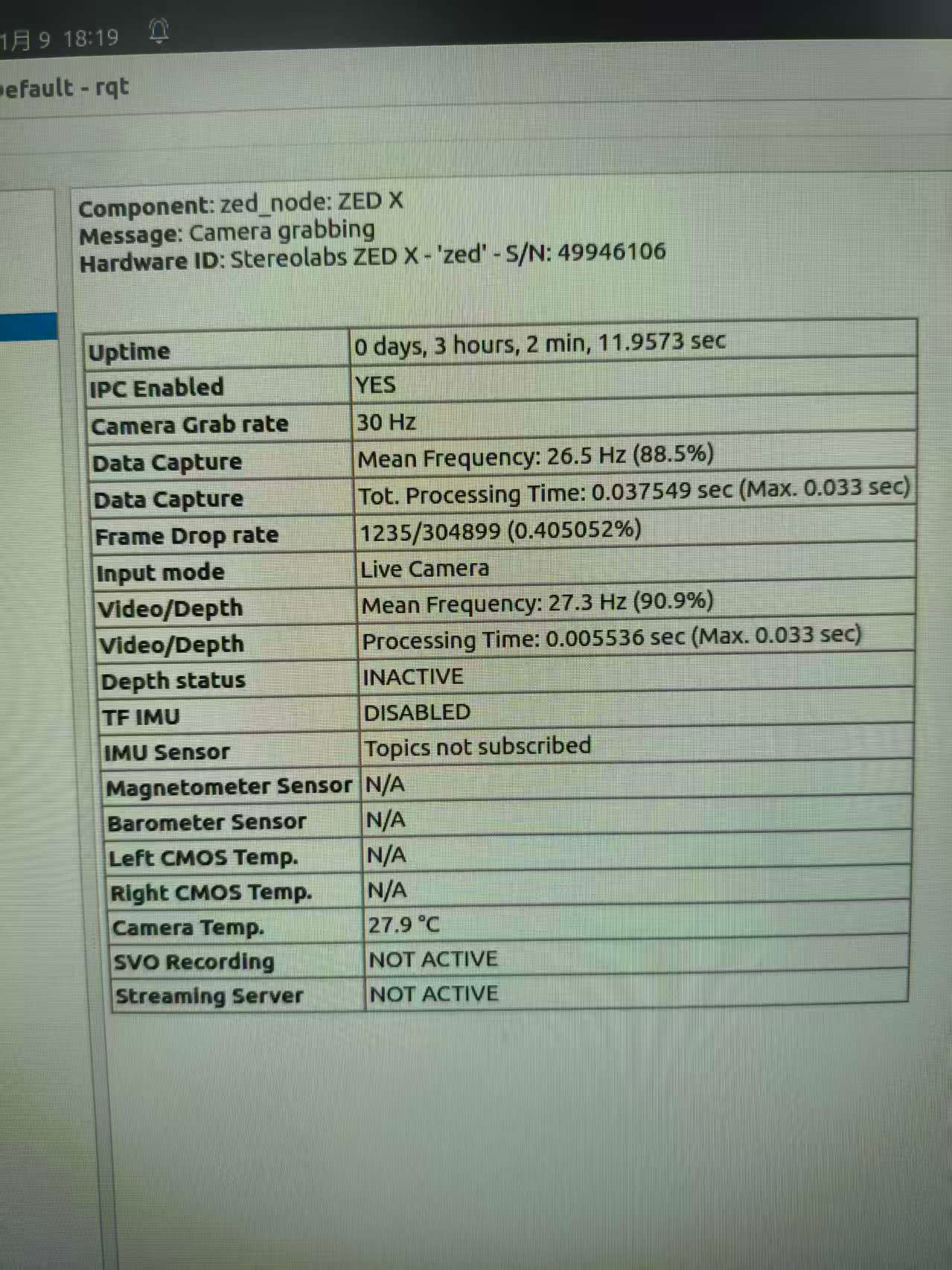
Please post a screenshot like the one that you can find in the documentation.
In any case, this reports “Camera Initializing”, so the node has not yet started.
Please post the full node log too.
qiran
January 9, 2026, 10:31am
7
\[component_container_isolated-2\] \[INFO\] \[1767875681.790154347\] \[zed.zed_node\]: === TF FRAMES ===
\[component_container_isolated-2\] \[INFO\] \[1767875681.790171436\] \[zed.zed_node\]: \* Map → map
\[component_container_isolated-2\] \[INFO\] \[1767875681.790182572\] \[zed.zed_node\]: \* Odometry → odom
\[component_container_isolated-2\] \[INFO\] \[1767875681.790192972\] \[zed.zed_node\]: \* Base → zed_camera_link
\[component_container_isolated-2\] \[INFO\] \[1767875681.790203341\] \[zed.zed_node\]: \* Camera → zed_camera_center
\[component_container_isolated-2\] \[INFO\] \[1767875681.790212941\] \[zed.zed_node\]: \* Left → zed_left_camera_frame
\[component_container_isolated-2\] \[INFO\] \[1767875681.790222893\] \[zed.zed_node\]: \* Left Optical → zed_left_camera_frame_optical
\[component_container_isolated-2\] \[INFO\] \[1767875681.790233517\] \[zed.zed_node\]: \* Right → zed_right_camera_frame
\[component_container_isolated-2\] \[INFO\] \[1767875681.790243054\] \[zed.zed_node\]: \* Right Optical → zed_right_camera_frame_optical
\[component_container_isolated-2\] \[INFO\] \[1767875681.790252526\] \[zed.zed_node\]: \* Depth → zed_left_camera_frame
\[component_container_isolated-2\] \[INFO\] \[1767875681.790262190\] \[zed.zed_node\]: \* Depth Optical → zed_left_camera_frame_optical
\[component_container_isolated-2\] \[INFO\] \[1767875681.790271598\] \[zed.zed_node\]: \* Point Cloud → zed_left_camera_frame
\[component_container_isolated-2\] \[INFO\] \[1767875681.790281135\] \[zed.zed_node\]: \* IMU → zed_imu_link
\[component_container_isolated-2\] \[INFO\] \[1767875681.790339088\] \[zed.zed_node\]: === PUBLISHED TOPICS ===
\[component_container_isolated-2\] \[INFO\] \[1767875681.792566670\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/status/health
\[component_container_isolated-2\] \[INFO\] \[1767875681.793587946\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/status/heartbeat
\[component_container_isolated-2\] \[INFO\] \[1767875681.989323757\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/rgb/color/rect/image
\[component_container_isolated-2\] \[INFO\] \[1767875681.990035264\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/rgb/color/rect/image/compressedDepth \[image_transport\]
\[component_container_isolated-2\] \[INFO\] \[1767875681.990076226\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/rgb/color/rect/image/compressed \[image_transport\]
\[component_container_isolated-2\] \[INFO\] \[1767875681.990094786\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/rgb/color/rect/image/raw \[image_transport\]
\[component_container_isolated-2\] \[INFO\] \[1767875681.990106690\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/rgb/color/rect/image/theora \[image_transport\]
\[component_container_isolated-2\] \[INFO\] \[1767875681.992627976\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/depth/depth_registered
\[component_container_isolated-2\] \[INFO\] \[1767875681.992756908\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/depth/depth_registered/compressedDepth \[image_transport\]
\[component_container_isolated-2\] \[INFO\] \[1767875681.992796589\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/depth/depth_registered/compressed \[image_transport\]
\[component_container_isolated-2\] \[INFO\] \[1767875681.992817197\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/depth/depth_registered/raw \[image_transport\]
\[component_container_isolated-2\] \[INFO\] \[1767875681.992833006\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/depth/depth_registered/theora \[image_transport\]
\[component_container_isolated-2\] \[INFO\] \[1767875681.993756103\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/rgb/color/rect/camera_info
\[component_container_isolated-2\] \[INFO\] \[1767875681.994221940\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/rgb/color/rect/image/camera_info
\[component_container_isolated-2\] \[INFO\] \[1767875681.994725634\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/depth/camera_info
\[component_container_isolated-2\] \[INFO\] \[1767875681.995169710\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/depth/depth_registered/camera_info
\[component_container_isolated-2\] \[INFO\] \[1767875681.995278993\] \[zed.zed_node\]: Camera-IMU Translation:
\[component_container_isolated-2\] 0 -0.035649 -0.000147
\[component_container_isolated-2\] \[INFO\] \[1767875681.995349043\] \[zed.zed_node\]: Camera-IMU Rotation:
\[component_container_isolated-2\] FFFF54CFC658
\[component_container_isolated-2\] 0.999983 -0.003611 0.004693
\[component_container_isolated-2\] 0.003624 0.999990 -0.002592
\[component_container_isolated-2\] -0.004684 0.002609 0.999986
\[component_container_isolated-2\]
\[component_container_isolated-2\] \[INFO\] \[1767875681.995387636\] \[zed.zed_node\]: ===Subscribers ===
\[component_container_isolated-2\] \[INFO\] \[1767875681.996782971\] \[zed.zed_node\]: \* Plane detection: ‘/clicked_point’
it’s not allowed to upload files, I pasted the last few lines of command line output, there are no errors.
Myzhar
January 9, 2026, 12:20pm
8
The diagnostic shows that the node is running, but I need the full log to know more.
qiran
January 9, 2026, 2:29pm
9
The new observation is that when a node of mine subscribes to the RGB image and depth map image topics, the feed is visible in RQT. However, when the subscribing node stops running, the feed is no longer visible in RQT either.
Myzhar
January 9, 2026, 4:11pm
10
This behavior is not expected.
Can you add details regarding your setup?
qiran
January 13, 2026, 9:39am
11
ros2 launch zed_wrapper zed_camera.launch.py camera_model:=zedx publish_tf:=false
\[INFO\] \[launch\]: All log files can be found below /home/jetson/.ros/log/2026-01-08-20-34-37-193386-jetson-111201
\[INFO\] \[launch\]: Default logging verbosity is set to INFO
\[INFO\] \[launch.user\]: Using common configuration file: /home/jetson/ros2_ws/install/zed_wrapper/share/zed_wrapper/config/common_stereo.yaml
\[INFO\] \[launch.user\]: Using camera configuration file: /home/jetson/ros2_ws/install/zed_wrapper/share/zed_wrapper/config/zedx.yaml
\[INFO\] \[launch.user\]: Using Object Detection configuration file: /home/jetson/ros2_ws/install/zed_wrapper/share/zed_wrapper/config/object_detection.yaml
\[INFO\] \[launch.user\]: Using Custom Object Detection configuration file: /home/jetson/ros2_ws/install/zed_wrapper/share/zed_wrapper/config/custom_object_detection.yaml
\[INFO\] \[launch.user\]: Loading ZED node `zed_node` in container `/zed/zed_container`
\[INFO\] \[robot_state_publisher-1\]: process started with pid \[111214\]
\[INFO\] \[component_container_isolated-2\]: process started with pid \[111216\]
\[robot_state_publisher-1\] \[INFO\] \[1767875678.354059092\] \[zed.zed_state_publisher\]: got segment zed_camera_center
\[robot_state_publisher-1\] \[INFO\] \[1767875678.354238777\] \[zed.zed_state_publisher\]: got segment zed_camera_link
\[robot_state_publisher-1\] \[INFO\] \[1767875678.354263129\] \[zed.zed_state_publisher\]: got segment zed_left_camera_frame
\[robot_state_publisher-1\] \[INFO\] \[1767875678.354274746\] \[zed.zed_state_publisher\]: got segment zed_left_camera_frame_optical
\[robot_state_publisher-1\] \[INFO\] \[1767875678.354283578\] \[zed.zed_state_publisher\]: got segment zed_right_camera_frame
\[robot_state_publisher-1\] \[INFO\] \[1767875678.354291514\] \[zed.zed_state_publisher\]: got segment zed_right_camera_frame_optical
\[component_container_isolated-2\] \[INFO\] \[1767875678.568961706\] \[zed.zed_container\]: Load Library: /home/jetson/ros2_ws/install/zed_components/lib/libzed_camera_component.so
\[component_container_isolated-2\] \[INFO\] \[1767875678.628905668\] \[zed.zed_container\]: Found class: rclcpp_components::NodeFactoryTemplate<stereolabs::ZedCamera>
\[component_container_isolated-2\] \[INFO\] \[1767875678.629022375\] \[zed.zed_container\]: Instantiate class: rclcpp_components::NodeFactoryTemplate<stereolabs::ZedCamera>
\[component_container_isolated-2\] \[INFO\] \[1767875678.745153555\] \[zed.zed_node\]: ================================
\[INFO\] \[launch_ros.actions.load_composable_nodes\]: Loaded node ‘/zed/zed_node’ in container ‘/zed/zed_container’
\[component_container_isolated-2\] \[INFO\] \[1767875678.745231317\] \[zed.zed_node\]: ZED Camera Component
\[component_container_isolated-2\] \[INFO\] \[1767875678.745249973\] \[zed.zed_node\]: ================================
\[component_container_isolated-2\] \[INFO\] \[1767875678.745266294\] \[zed.zed_node\]: \* namespace: /zed
\[component_container_isolated-2\] \[INFO\] \[1767875678.745280406\] \[zed.zed_node\]: \* node name: zed_node
\[component_container_isolated-2\] \[INFO\] \[1767875678.745290935\] \[zed.zed_node\]: \* IPC: enabled
\[component_container_isolated-2\] \[INFO\] \[1767875678.745301015\] \[zed.zed_node\]: ================================
\[component_container_isolated-2\] \[INFO\] \[1767875678.795634119\] \[zed.zed_node\]: === DEBUG parameters ===
\[component_container_isolated-2\] \[INFO\] \[1767875678.796107636\] \[zed.zed_node\]: \* SDK Verbose: 1
\[component_container_isolated-2\] \[INFO\] \[1767875678.796348634\] \[zed.zed_node\]: \* Use Pub Timestamps: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.796492766\] \[zed.zed_node\]: \* SDK Verbose File:
\[component_container_isolated-2\] \[INFO\] \[1767875678.796611298\] \[zed.zed_node\]: \* Debug Common: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.796711140\] \[zed.zed_node\]: \* Debug Simulation: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.796814119\] \[zed.zed_node\]: \* Debug Video/Depth: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.796894634\] \[zed.zed_node\]: \* Debug Control settings: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.796969292\] \[zed.zed_node\]: \* Debug Point Cloud: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.797049230\] \[zed.zed_node\]: \* Debug TF: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.797159377\] \[zed.zed_node\]: \* Debug Positional Tracking: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.797243923\] \[zed.zed_node\]: \* Debug GNSS: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.797324565\] \[zed.zed_node\]: \* Debug sensors: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.797403640\] \[zed.zed_node\]: \* Debug Mapping: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.797491194\] \[zed.zed_node\]: \* Debug Object Detection: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.797567388\] \[zed.zed_node\]: \* Debug Body Tracking: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.797642814\] \[zed.zed_node\]: \* Debug Streaming: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.797727425\] \[zed.zed_node\]: \* Debug ROI: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.797806403\] \[zed.zed_node\]: \* Debug Nitros: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.797895909\] \[zed.zed_node\]: \* Debug Advanced: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.797942951\] \[zed.zed_node\]: === TOPIC selection parameters ===
\[component_container_isolated-2\] \[INFO\] \[1767875678.798021769\] \[zed.zed_node\]: \* Publish Status: TRUE
\[component_container_isolated-2\] \[INFO\] \[1767875678.798104619\] \[zed.zed_node\]: \* Image format: BGRA 32-bit
\[component_container_isolated-2\] \[INFO\] \[1767875678.798191341\] \[zed.zed_node\]: \* Publish Left/Right images: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.798269104\] \[zed.zed_node\]: \* Publish Raw images: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.798346194\] \[zed.zed_node\]: \* Publish Gray images: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.798423988\] \[zed.zed_node\]: \* Publish RGB image: TRUE
\[component_container_isolated-2\] \[INFO\] \[1767875678.798503446\] \[zed.zed_node\]: \* Publish Stereo image: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.798622457\] \[zed.zed_node\]: \* Publish ROI Mask image: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.798708572\] \[zed.zed_node\]: \* Publish Depth Map: TRUE
\[component_container_isolated-2\] \[INFO\] \[1767875678.798789758\] \[zed.zed_node\]: \* Publish Depth Info: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.798866944\] \[zed.zed_node\]: \* Publish Point Cloud: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.798950818\] \[zed.zed_node\]: \* Publish Depth Confidence: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.799030341\] \[zed.zed_node\]: \* Publish Disparity: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.799109927\] \[zed.zed_node\]: \* Publish IMU: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.799187241\] \[zed.zed_node\]: \* Publish IMU Raw: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.799273195\] \[zed.zed_node\]: \* Publish LeftCam/IMU Transf.: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.799352878\] \[zed.zed_node\]: \* Publish Magnetometer: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.799430416\] \[zed.zed_node\]: \* Publish Barometer: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.799513938\] \[zed.zed_node\]: \* Publish Temperature: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.799601812\] \[zed.zed_node\]: \* Publish Odometry/Pose: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.799682263\] \[zed.zed_node\]: \* Publish Pose with Covariance: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.799759097\] \[zed.zed_node\]: \* Publish Camera Path: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.799837403\] \[zed.zed_node\]: \* Publish Detection Plane: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.800030464\] \[zed.zed_node\]: === SVO INPUT parameters ===
\[component_container_isolated-2\] \[INFO\] \[1767875678.800134627\] \[zed.zed_node\]: === LOCAL STREAMING parameters ===
\[component_container_isolated-2\] \[INFO\] \[1767875678.800220422\] \[zed.zed_node\]: === GENERAL parameters ===
\[component_container_isolated-2\] \[INFO\] \[1767875678.800326568\] \[zed.zed_node\]: \* Camera model: zedx - ZED X
\[component_container_isolated-2\] \[INFO\] \[1767875678.800439436\] \[zed.zed_node\]: \* Camera name: zed
\[component_container_isolated-2\] \[INFO\] \[1767875678.800535726\] \[zed.zed_node\]: \* Camera SN: 0
\[component_container_isolated-2\] \[INFO\] \[1767875678.800630161\] \[zed.zed_node\]: \* Camera ID: -1
\[component_container_isolated-2\] \[INFO\] \[1767875678.800713907\] \[zed.zed_node\]: \* Camera timeout \[sec\]: 5
\[component_container_isolated-2\] \[INFO\] \[1767875678.800803862\] \[zed.zed_node\]: \* Camera reconnection temptatives: 5
\[component_container_isolated-2\] \[INFO\] \[1767875678.800888856\] \[zed.zed_node\]: \* Camera framerate: 30
\[component_container_isolated-2\] \[INFO\] \[1767875678.800970746\] \[zed.zed_node\]: \* GPU ID: -1
\[component_container_isolated-2\] \[INFO\] \[1767875678.801051548\] \[zed.zed_node\]: \* Asynchronous image retrieval: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.801141727\] \[zed.zed_node\]: \* Image Validity Check: 1
\[component_container_isolated-2\] \[INFO\] \[1767875678.801251714\] \[zed.zed_node\]: \* Camera resolution: HD1200
\[component_container_isolated-2\] \[INFO\] \[1767875678.801352229\] \[zed.zed_node\]: \* Publishing resolution: CUSTOM
\[component_container_isolated-2\] \[INFO\] \[1767875678.801492361\] \[zed.zed_node\]: \* Publishing downscale factor: 2
\[component_container_isolated-2\] \[INFO\] \[1767875678.801578603\] \[zed.zed_node\]: \* OpenCV custom calibration:
\[component_container_isolated-2\] \[INFO\] \[1767875678.801675502\] \[zed.zed_node\]: \* Camera self calibration: TRUE
\[component_container_isolated-2\] \[INFO\] \[1767875678.801756624\] \[zed.zed_node\]: \* Camera flip: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.801851987\] \[zed.zed_node\]: \* Publish framerate \[Hz\]: 30
\[component_container_isolated-2\] \[INFO\] \[1767875678.801898900\] \[zed.zed_node\]: === VIDEO parameters ===
\[component_container_isolated-2\] \[INFO\] \[1767875678.801993399\] \[zed.zed_node\]: \* Saturation: 4 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1767875678.802073273\] \[zed.zed_node\]: \* Sharpness: 4 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1767875678.802155323\] \[zed.zed_node\]: \* Gamma: 8 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1767875678.802233085\] \[zed.zed_node\]: \* Auto Exposure/Gain: TRUE \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1767875678.802325952\] \[zed.zed_node\]: \* Exposure: 80 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1767875678.802407266\] \[zed.zed_node\]: \* Gain: 80 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1767875678.802487812\] \[zed.zed_node\]: \* Auto White Balance: TRUE \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1767875678.802587271\] \[zed.zed_node\]: \* White Balance Temperature: 42 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1767875678.802686730\] \[zed.zed_node\]: \* ZED X Exposure time: 16000 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1767875678.802770348\] \[zed.zed_node\]: \* ZED X Auto Exp. time range min: 28 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1767875678.802853838\] \[zed.zed_node\]: \* ZED X Auto Exp. time range max: 30000 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1767875678.802942929\] \[zed.zed_node\]: \* ZED X Exposure comp.: 50 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1767875678.803034163\] \[zed.zed_node\]: \* ZED X Analog Gain: 1255 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1767875678.803112853\] \[zed.zed_node\]: \* ZED X Auto Analog Gain range min: 1000 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1767875678.803191032\] \[zed.zed_node\]: \* ZED X Auto Analog Gain range max: 16000 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1767875678.803275546\] \[zed.zed_node\]: \* ZED X Digital Gain: 1 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1767875678.803363740\] \[zed.zed_node\]: \* ZED X Auto Digital Gain range min: 1 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1767875678.803444767\] \[zed.zed_node\]: \* ZED X Auto Digital Gain range max: 256 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1767875678.803533953\] \[zed.zed_node\]: \* ZED X Auto Digital Gain range max: 50 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1767875678.803562498\] \[zed.zed_node\]: === DEPTH parameters ===
\[component_container_isolated-2\] \[INFO\] \[1767875678.803710502\] \[zed.zed_node\]: \* Depth mode: NEURAL LIGHT \[4\]
\[component_container_isolated-2\] \[INFO\] \[1767875678.803822377\] \[zed.zed_node\]: \* Min depth \[m\]: 0.01
\[component_container_isolated-2\] \[INFO\] \[1767875678.803917292\] \[zed.zed_node\]: \* Max depth \[m\]: 40
\[component_container_isolated-2\] \[INFO\] \[1767875678.804006894\] \[zed.zed_node\]: \* Depth Stabilization: 0
\[component_container_isolated-2\] \[INFO\] \[1767875678.804096625\] \[zed.zed_node\]: \* OpenNI mode (16bit depth): FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.804192115\] \[zed.zed_node\]: \* Point cloud rate \[Hz\]: 10
\[component_container_isolated-2\] \[INFO\] \[1767875678.804284310\] \[zed.zed_node\]: \* Point cloud resolution: COMPACT
\[component_container_isolated-2\] \[INFO\] \[1767875678.804372568\] \[zed.zed_node\]: \* Depth Confidence: 95 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1767875678.804465275\] \[zed.zed_node\]: \* Depth Texture Confidence: 100 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1767875678.804555037\] \[zed.zed_node\]: \* Remove saturated areas: TRUE \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1767875678.804641184\] \[zed.zed_node\]: === GNSS FUSION parameters ===
\[component_container_isolated-2\] \[INFO\] \[1767875678.804734626\] \[zed.zed_node\]: \* GNSS fusion enabled: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.804764867\] \[zed.zed_node\]: === POSITIONAL TRACKING parameters ===
\[component_container_isolated-2\] \[INFO\] \[1767875678.804844549\] \[zed.zed_node\]: \* Positional tracking enabled: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.804963977\] \[zed.zed_node\]: \* Positional tracking mode: GEN 2
\[component_container_isolated-2\] \[INFO\] \[1767875678.805063851\] \[zed.zed_node\]: \* Map frame id: map
\[component_container_isolated-2\] \[INFO\] \[1767875678.805148142\] \[zed.zed_node\]: \* Odometry frame id: odom
\[component_container_isolated-2\] \[INFO\] \[1767875678.805229232\] \[zed.zed_node\]: \* Broadcast Odometry TF: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.805337971\] \[zed.zed_node\]: \* Depth minimum range: 0
\[component_container_isolated-2\] \[INFO\] \[1767875678.805458070\] \[zed.zed_node\]: \* TF timestamp offset: 0 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1767875678.805616987\] \[zed.zed_node\]: \* Path publishing rate: 2 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1767875678.805734942\] \[zed.zed_node\]: \* Path history lenght: -1
\[component_container_isolated-2\] \[INFO\] \[1767875678.805863714\] \[zed.zed_node\]: \* Initial pose: \[0,0,0,0,0,0,\]
\[component_container_isolated-2\] \[INFO\] \[1767875678.805982565\] \[zed.zed_node\]: \* Area Memory: TRUE
\[component_container_isolated-2\] \[INFO\] \[1767875678.806078600\] \[zed.zed_node\]: \* Area Memory File:
\[component_container_isolated-2\] \[INFO\] \[1767875678.806167434\] \[zed.zed_node\]: \* Enable Localization Only: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.806254508\] \[zed.zed_node\]: \* Save Area Memory on closing: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.806360655\] \[zed.zed_node\]: \* Camera is static: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.806462898\] \[zed.zed_node\]: \* Gravity as origin: TRUE
\[component_container_isolated-2\] \[INFO\] \[1767875678.806590358\] \[zed.zed_node\]: \* IMU Fusion: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.806709145\] \[zed.zed_node\]: \* Floor Alignment: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.806817596\] \[zed.zed_node\]: \* Reset Odometry with Loop Closure: TRUE
\[component_container_isolated-2\] \[INFO\] \[1767875678.806910911\] \[zed.zed_node\]: \* Publish 3D Landmarks: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.807010881\] \[zed.zed_node\]: \* Publish Landmark Skip Frame:
\[component_container_isolated-2\] \[INFO\] \[1767875678.807100484\] \[zed.zed_node\]: \* 2D mode: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.807190598\] \[zed.zed_node\]: \* Reset pose with SVO loop: TRUE
\[component_container_isolated-2\] \[INFO\] \[1767875678.807219623\] \[zed.zed_node\]: === Region of Interest parameters ===
\[component_container_isolated-2\] \[INFO\] \[1767875678.807302889\] \[zed.zed_node\]: \* Automatic ROI generation: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.807415148\] \[zed.zed_node\]: \* Manual ROI polygon: [ ]
\[component_container_isolated-2\] \[INFO\] \[1767875678.807444461\] \[zed.zed_node\]: === SENSORS STACK parameters ===
\[component_container_isolated-2\] \[INFO\] \[1767875678.807530864\] \[zed.zed_node\]: \* Broadcast IMU TF \[not for ZED\]: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.807622354\] \[zed.zed_node\]: \* Sensors Camera Sync: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.807729141\] \[zed.zed_node\]: \* Sensors publishing rate \[Hz\]: 100 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1767875678.807758646\] \[zed.zed_node\]: === Spatial Mapping parameters ===
\[component_container_isolated-2\] \[INFO\] \[1767875678.807851257\] \[zed.zed_node\]: \* Spatial Mapping Enabled: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.807956123\] \[zed.zed_node\]: \* Spatial Mapping resolution \[m\]: 0.05
\[component_container_isolated-2\] \[INFO\] \[1767875678.808078239\] \[zed.zed_node\]: \* 3D Max Mapping range \[m\]: 5
\[component_container_isolated-2\] \[INFO\] \[1767875678.808185282\] \[zed.zed_node\]: \* Map publishing rate \[Hz\]: 1 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1767875678.808304325\] \[zed.zed_node\]: \* Clicked point topic: /clicked_point
\[component_container_isolated-2\] \[INFO\] \[1767875678.808410504\] \[zed.zed_node\]: \* Plane Det. Max Dist. Thresh.: 0.15
\[component_container_isolated-2\] \[INFO\] \[1767875678.808512875\] \[zed.zed_node\]: \* Plane Det. Normals Sim. Thresh.: 15
\[component_container_isolated-2\] \[INFO\] \[1767875678.808558412\] \[zed.zed_node\]: === OBJECT DETECTION parameters ===
\[component_container_isolated-2\] \[INFO\] \[1767875678.808662767\] \[zed.zed_node\]: \* Object Det. enabled: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.808759186\] \[zed.zed_node\]: \* Object Det. allow reduced precision: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.808892149\] \[zed.zed_node\]: \* Object Det. maximum range \[m\]: 20
\[component_container_isolated-2\] \[INFO\] \[1767875678.808998040\] \[zed.zed_node\]: \* Object Det. prediction timeout \[sec\]: 2
\[component_container_isolated-2\] \[INFO\] \[1767875678.809094459\] \[zed.zed_node\]: \* Object Det. tracking: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.809232223\] \[zed.zed_node\]: \* Object Filtering mode: NMS3D
\[component_container_isolated-2\] \[INFO\] \[1767875678.809361154\] \[zed.zed_node\]: \* Object Det. model: MULTI CLASS BOX FAST
\[component_container_isolated-2\] \[INFO\] \[1767875678.809468549\] \[zed.zed_node\]: \* MultiClassBox people: TRUE \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1767875678.809567368\] \[zed.zed_node\]: \* MultiClassBox vehicles: TRUE \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1767875678.809658667\] \[zed.zed_node\]: \* MultiClassBox bags: TRUE \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1767875678.809807279\] \[zed.zed_node\]: \* MultiClassBox animals: TRUE \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1767875678.809905105\] \[zed.zed_node\]: \* MultiClassBox electronics: TRUE \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1767875678.809995412\] \[zed.zed_node\]: \* MultiClassBox fruits and vegetables: TRUE \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1767875678.810090838\] \[zed.zed_node\]: \* MultiClassBox sport-related objects: TRUE \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1767875678.810209850\] \[zed.zed_node\]: \* MultiClassBox people confidence: 65 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1767875678.810313117\] \[zed.zed_node\]: \* MultiClassBox vehicles confidence: 60 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1767875678.810441824\] \[zed.zed_node\]: \* MultiClassBox bags confidence: 40 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1767875678.810591332\] \[zed.zed_node\]: \* MultiClassBox animals confidence: 40 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1767875678.810738312\] \[zed.zed_node\]: \* MultiClassBox electronics confidence: 45 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1767875678.810848811\] \[zed.zed_node\]: \* MultiClassBox fruits and vegetables confidence: 50 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1767875678.810952046\] \[zed.zed_node\]: \* MultiClassBox sport-related objects confidence: 30 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1767875678.810982671\] \[zed.zed_node\]: === Body Track. parameters ===
\[component_container_isolated-2\] \[INFO\] \[1767875678.811083250\] \[zed.zed_node\]: \* Body Track. enabled: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.811207221\] \[zed.zed_node\]: \* Body Track. model: HUMAN BODY MEDIUM
\[component_container_isolated-2\] \[INFO\] \[1767875678.811335129\] \[zed.zed_node\]: \* Body Track. format: BODY 38
\[component_container_isolated-2\] \[INFO\] \[1767875678.811432924\] \[zed.zed_node\]: \* Body Track. allow reduced precision: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.811538430\] \[zed.zed_node\]: \* Body Track. maximum range \[m\]: 15
\[component_container_isolated-2\] \[INFO\] \[1767875678.811658818\] \[zed.zed_node\]: \* Body Track. KP selection: FULL
\[component_container_isolated-2\] \[INFO\] \[1767875678.811798214\] \[zed.zed_node\]: \* Body fitting: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.811906697\] \[zed.zed_node\]: \* Body joints tracking: TRUE
\[component_container_isolated-2\] \[INFO\] \[1767875678.812031372\] \[zed.zed_node\]: \* Body Track. prediction timeout \[sec\]: 0.5
\[component_container_isolated-2\] \[INFO\] \[1767875678.812154960\] \[zed.zed_node\]: \* Body Track. confidence thresh.: 50 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1767875678.812257170\] \[zed.zed_node\]: \* Body Track. min. KP thresh.: 5 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1767875678.812287219\] \[zed.zed_node\]: === STREAMING SERVER parameters ===
\[component_container_isolated-2\] \[INFO\] \[1767875678.812391190\] \[zed.zed_node\]: \* Streaming Server enabled: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.812488153\] \[zed.zed_node\]: \* Stream codec: H264
\[component_container_isolated-2\] \[INFO\] \[1767875678.812582203\] \[zed.zed_node\]: \* Stream port: 30000
\[component_container_isolated-2\] \[INFO\] \[1767875678.812676926\] \[zed.zed_node\]: \* Stream bitrate: 12500
\[component_container_isolated-2\] \[INFO\] \[1767875678.812771777\] \[zed.zed_node\]: \* Stream GOP size: -1
\[component_container_isolated-2\] \[INFO\] \[1767875678.812881668\] \[zed.zed_node\]: \* Stream Chunk size: 16084
\[component_container_isolated-2\] \[INFO\] \[1767875678.812977638\] \[zed.zed_node\]: \* Adaptive bitrate: FALSE
\[component_container_isolated-2\] \[INFO\] \[1767875678.813071433\] \[zed.zed_node\]: \* Target frame rate:0
\[component_container_isolated-2\] \[INFO\] \[1767875678.813099562\] \[zed.zed_node\]: === ADVANCED parameters ===
\[component_container_isolated-2\] \[INFO\] \[1767875678.813183020\] \[zed.zed_node\]: \* Thread sched. policy: SCHED_BATCH
qiran
January 13, 2026, 9:39am
12
\[component_container_isolated-2\] \[INFO\] \[1767875678.813306479\] \[zed.zed_node\]: === SERVICES ===
\[component_container_isolated-2\] \[INFO\] \[1767875678.814753047\] \[zed.zed_node\]: \* Advertised on service: ‘/zed/zed_node/reset_odometry’
\[component_container_isolated-2\] \[INFO\] \[1767875678.815527629\] \[zed.zed_node\]: \* Advertised on service: ‘/zed/zed_node/reset_pos_tracking’
\[component_container_isolated-2\] \[INFO\] \[1767875678.817034070\] \[zed.zed_node\]: \* Advertised on service: ‘/zed/zed_node/set_pose’
\[component_container_isolated-2\] \[INFO\] \[1767875678.817841517\] \[zed.zed_node\]: \* Advertised on service: ‘/zed/zed_node/save_area_memory’
\[component_container_isolated-2\] \[INFO\] \[1767875678.818637891\] \[zed.zed_node\]: \* Advertised on service: ‘/zed/zed_node/enable_obj_det’
\[component_container_isolated-2\] \[INFO\] \[1767875678.819335958\] \[zed.zed_node\]: \* Advertised on service: ‘/zed/zed_node/enable_body_trk’
\[component_container_isolated-2\] \[INFO\] \[1767875678.820263440\] \[zed.zed_node\]: \* Advertised on service: ‘/zed/zed_node/enable_mapping’
\[component_container_isolated-2\] \[INFO\] \[1767875678.821037285\] \[zed.zed_node\]: \* Advertised on service: ‘/zed/zed_node/enable_streaming’
\[component_container_isolated-2\] \[INFO\] \[1767875678.821873532\] \[zed.zed_node\]: \* Advertised on service: ‘/zed/zed_node/start_svo_rec’
\[component_container_isolated-2\] \[INFO\] \[1767875678.822688979\] \[zed.zed_node\]: \* Advertised on service: ‘/zed/zed_node/stop_svo_rec’
\[component_container_isolated-2\] \[INFO\] \[1767875678.823466408\] \[zed.zed_node\]: \* Advertised on service: ‘/zed/zed_node/set_roi’
\[component_container_isolated-2\] \[INFO\] \[1767875678.824262782\] \[zed.zed_node\]: \* Advertised on service: ‘/zed/zed_node/reset_roi’
\[component_container_isolated-2\] \[INFO\] \[1767875678.824344641\] \[zed.zed_node\]: === STARTING CAMERA ===
\[component_container_isolated-2\] \[INFO\] \[1767875678.824478948\] \[zed.zed_node\]: ZED SDK Version: 5.1.2 - Build 108212_12a35ea7
\[component_container_isolated-2\] \[INFO\] \[1767875678.831042874\] \[zed.zed_node\]: === CAMERA OPENING ===
\[component_container_isolated-2\] \[2026-01-08 20:34:39 UTC\]\[ZED\]\[INFO\] Logging level INFO
\[component_container_isolated-2\] \[2026-01-08 20:34:41 UTC\]\[ZED\]\[INFO\] \[Init\] Camera FW version: 2001
\[component_container_isolated-2\] \[2026-01-08 20:34:41 UTC\]\[ZED\]\[INFO\] \[Init\] Video mode: HD1200@30
\[component_container_isolated-2\] \[2026-01-08 20:34:41 UTC\]\[ZED\]\[INFO\] \[Init\] Serial Number: S/N 42037516
\[component_container_isolated-2\] \[2026-01-08 20:34:41 UTC\]\[ZED\]\[INFO\] \[Init\] Depth mode: NEURAL LIGHT
\[component_container_isolated-2\] \[INFO\] \[1767875681.789661822\] \[zed.zed_node\]: \* ZED SDK running on GPU #0
\[component_container_isolated-2\] \[INFO\] \[1767875681.789804994\] \[zed.zed_node\]: \* Camera Model → ZED X
\[component_container_isolated-2\] \[INFO\] \[1767875681.789827970\] \[zed.zed_node\]: \* Serial Number → 42037516
\[component_container_isolated-2\] \[INFO\] \[1767875681.789984519\] \[zed.zed_node\]: \* Focal Length → 3.80202 mm
\[component_container_isolated-2\] \[INFO\] \[1767875681.790033864\] \[zed.zed_node\]: \* Input → GMSL
\[component_container_isolated-2\] \[INFO\] \[1767875681.790058601\] \[zed.zed_node\]: \* Camera FW Version → 2001
\[component_container_isolated-2\] \[INFO\] \[1767875681.790074473\] \[zed.zed_node\]: \* Sensors FW Version → 1000
\[component_container_isolated-2\] \[INFO\] \[1767875681.790092650\] \[zed.zed_node\]: \* Camera grab size → 1920x1200
\[component_container_isolated-2\] \[INFO\] \[1767875681.790105610\] \[zed.zed_node\]: \* Color/Depth publishing size → 960x600
\[component_container_isolated-2\] \[INFO\] \[1767875681.790117386\] \[zed.zed_node\]: \* Point Cloud publishing size → 448x256
\[component_container_isolated-2\] \[INFO\] \[1767875681.790154347\] \[zed.zed_node\]: === TF FRAMES ===
\[component_container_isolated-2\] \[INFO\] \[1767875681.790171436\] \[zed.zed_node\]: \* Map → map
\[component_container_isolated-2\] \[INFO\] \[1767875681.790182572\] \[zed.zed_node\]: \* Odometry → odom
\[component_container_isolated-2\] \[INFO\] \[1767875681.790192972\] \[zed.zed_node\]: \* Base → zed_camera_link
\[component_container_isolated-2\] \[INFO\] \[1767875681.790203341\] \[zed.zed_node\]: \* Camera → zed_camera_center
\[component_container_isolated-2\] \[INFO\] \[1767875681.790212941\] \[zed.zed_node\]: \* Left → zed_left_camera_frame
\[component_container_isolated-2\] \[INFO\] \[1767875681.790222893\] \[zed.zed_node\]: \* Left Optical → zed_left_camera_frame_optical
\[component_container_isolated-2\] \[INFO\] \[1767875681.790233517\] \[zed.zed_node\]: \* Right → zed_right_camera_frame
\[component_container_isolated-2\] \[INFO\] \[1767875681.790243054\] \[zed.zed_node\]: \* Right Optical → zed_right_camera_frame_optical
\[component_container_isolated-2\] \[INFO\] \[1767875681.790252526\] \[zed.zed_node\]: \* Depth → zed_left_camera_frame
\[component_container_isolated-2\] \[INFO\] \[1767875681.790262190\] \[zed.zed_node\]: \* Depth Optical → zed_left_camera_frame_optical
\[component_container_isolated-2\] \[INFO\] \[1767875681.790271598\] \[zed.zed_node\]: \* Point Cloud → zed_left_camera_frame
\[component_container_isolated-2\] \[INFO\] \[1767875681.790281135\] \[zed.zed_node\]: \* IMU → zed_imu_link
\[component_container_isolated-2\] \[INFO\] \[1767875681.790339088\] \[zed.zed_node\]: === PUBLISHED TOPICS ===
\[component_container_isolated-2\] \[INFO\] \[1767875681.792566670\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/status/health
\[component_container_isolated-2\] \[INFO\] \[1767875681.793587946\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/status/heartbeat
\[component_container_isolated-2\] \[INFO\] \[1767875681.989323757\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/rgb/color/rect/image
\[component_container_isolated-2\] \[INFO\] \[1767875681.990035264\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/rgb/color/rect/image/compressedDepth \[image_transport\]
\[component_container_isolated-2\] \[INFO\] \[1767875681.990076226\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/rgb/color/rect/image/compressed \[image_transport\]
\[component_container_isolated-2\] \[INFO\] \[1767875681.990094786\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/rgb/color/rect/image/raw \[image_transport\]
\[component_container_isolated-2\] \[INFO\] \[1767875681.990106690\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/rgb/color/rect/image/theora \[image_transport\]
\[component_container_isolated-2\] \[INFO\] \[1767875681.992627976\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/depth/depth_registered
\[component_container_isolated-2\] \[INFO\] \[1767875681.992756908\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/depth/depth_registered/compressedDepth \[image_transport\]
\[component_container_isolated-2\] \[INFO\] \[1767875681.992796589\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/depth/depth_registered/compressed \[image_transport\]
\[component_container_isolated-2\] \[INFO\] \[1767875681.992817197\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/depth/depth_registered/raw \[image_transport\]
\[component_container_isolated-2\] \[INFO\] \[1767875681.992833006\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/depth/depth_registered/theora \[image_transport\]
\[component_container_isolated-2\] \[INFO\] \[1767875681.993756103\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/rgb/color/rect/camera_info
\[component_container_isolated-2\] \[INFO\] \[1767875681.994221940\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/rgb/color/rect/image/camera_info
\[component_container_isolated-2\] \[INFO\] \[1767875681.994725634\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/depth/camera_info
\[component_container_isolated-2\] \[INFO\] \[1767875681.995169710\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/depth/depth_registered/camera_info
\[component_container_isolated-2\] \[INFO\] \[1767875681.995278993\] \[zed.zed_node\]: Camera-IMU Translation:
\[component_container_isolated-2\] 0 -0.035649 -0.000147
\[component_container_isolated-2\] \[INFO\] \[1767875681.995349043\] \[zed.zed_node\]: Camera-IMU Rotation:
\[component_container_isolated-2\] FFFF54CFC658
\[component_container_isolated-2\] 0.999983 -0.003611 0.004693
\[component_container_isolated-2\] 0.003624 0.999990 -0.002592
\[component_container_isolated-2\] -0.004684 0.002609 0.999986
\[component_container_isolated-2\]
\[component_container_isolated-2\] \[INFO\] \[1767875681.995387636\] \[zed.zed_node\]: ===Subscribers ===
\[component_container_isolated-2\] \[INFO\] \[1767875681.996782971\] \[zed.zed_node\]: \* Plane detection: ‘/clicked_point’
Myzhar
January 13, 2026, 1:23pm
13
Hi @qiran