Hello,
I have a ZED X Mini connected to a Jetson Orin Nano using the ZED Link Capture Card Mono. I am trying to launch the following ROS2 command from an ssh -X terminal in my PC:
ros2 launch zed_wrapper zed_camera.launch.py ‘camera_model:=zedxm’
And I am getting the following error:
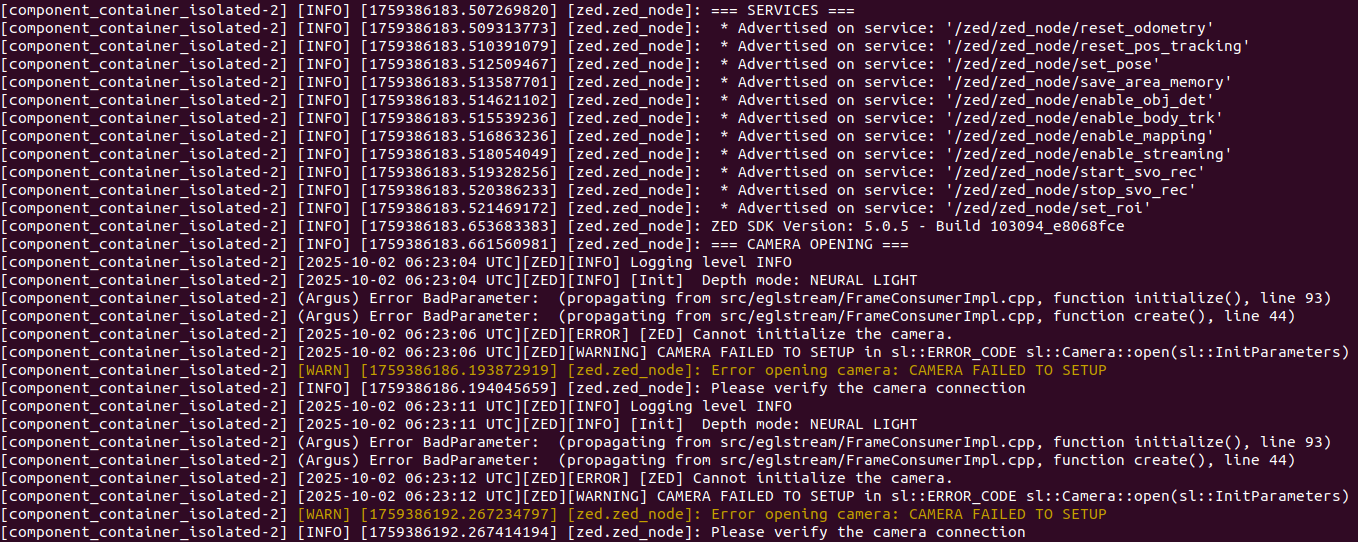
The Jetson has now a monitor connected (I first tried with a DP dummy plug but the results were the same)
When I launch the command: sudo ZED_Diagnostic -c from the ssh -X terminal in my PC I get the following error:
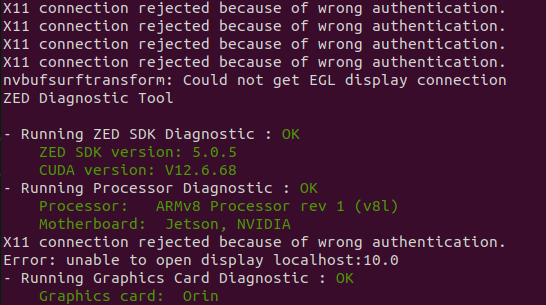
Here is the diagnostics file:
ZED_Diagnostic_Results_myPC.json (28.0 KB)
However, when I launch the same diagnostics command from the Jetson, I get no error. Here is the diagnostics file from the Jetson:
ZED_Diagnostic_Results_Jetson.json (28.7 KB)
One thing that I found out is that if I launch the ROS2 command from the Jetson:
ros2 launch zed_wrapper zed_camera.launch.py ‘camera_model:=zedxm’
then I can see the topics and view the camera on my PC using rqt via the ssh -X terminal not via ROS2 (my PC does not have ROS2 installed).
Any help would be appreciated
Best regards