Hi all,
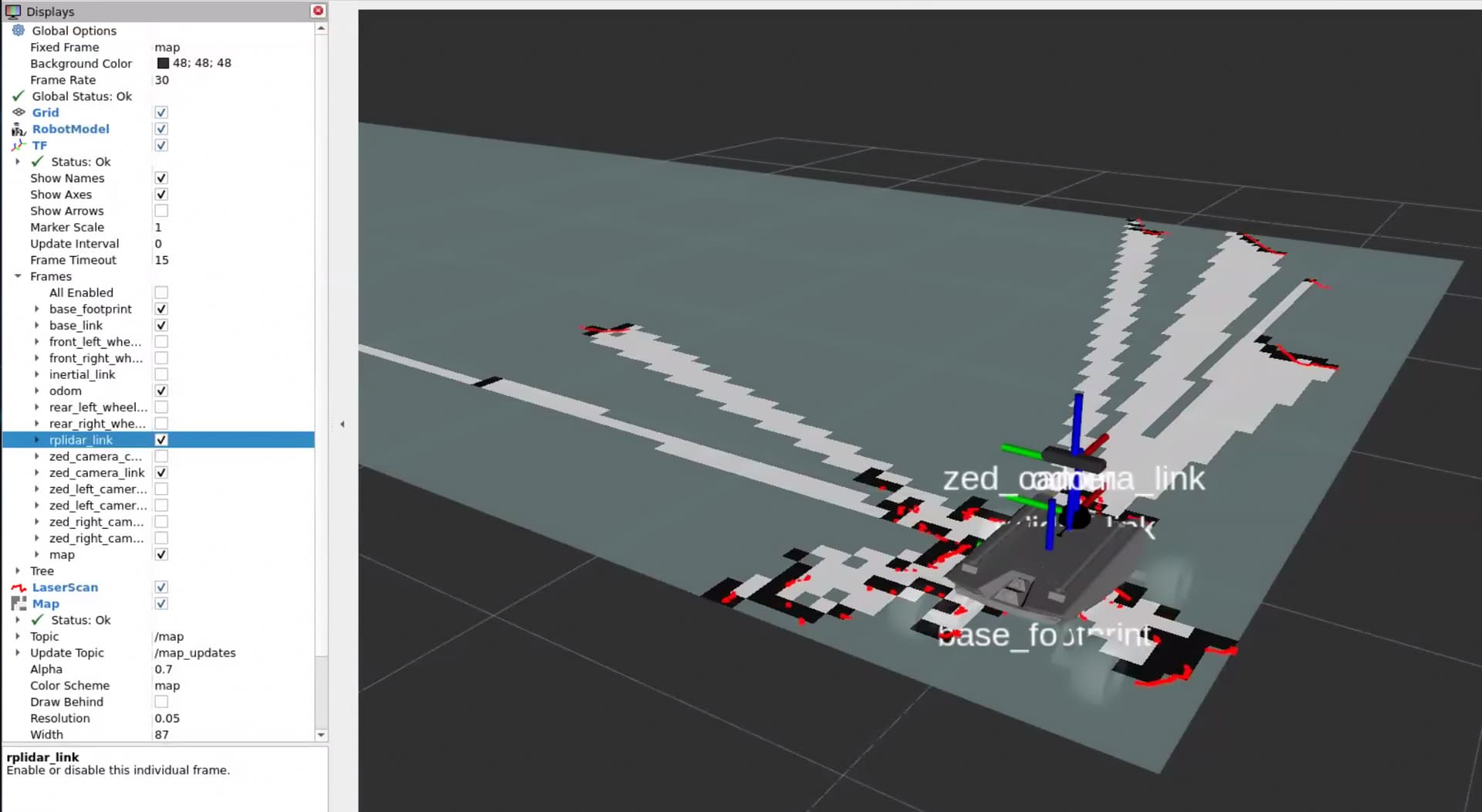
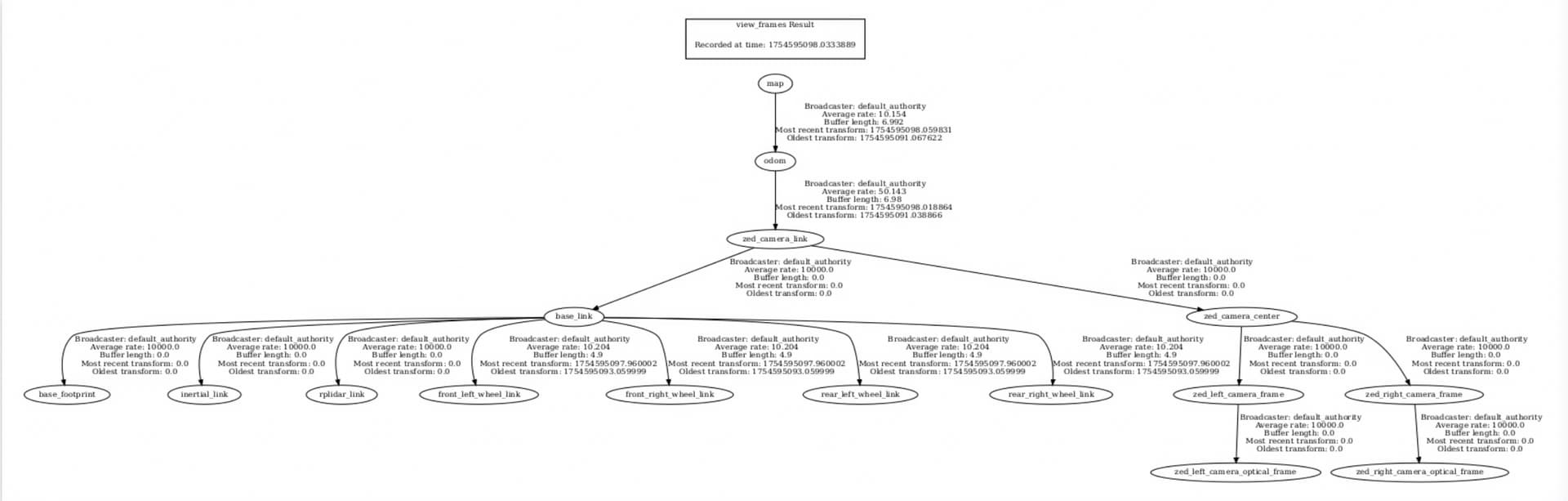
I’m currently building an AMR based on ZEDX, S2 Lidar, and Scout Mini. So far, I have been able to integrate this stack with the slam_toolbox and Nav2 packages. However, I’m not sure if my TF tree is correct.
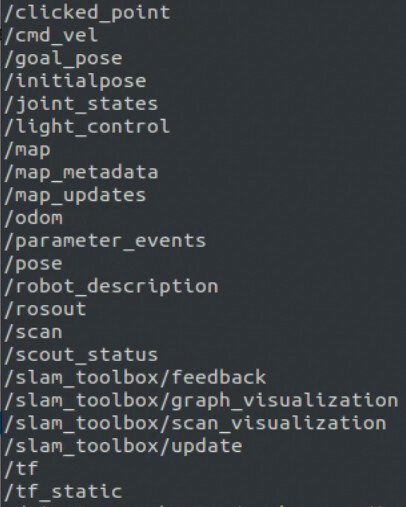
With this setup, it looks like I’m able to generate a 2D map. However, I’m wondering how I can benefit from the official ZEDX - Scout Mini Integration ( ZED integration on a Robot - Stereolabs ). Additionally, there are two related topics, namely /zed/zed_node/odom and /zed/zed_node/pose, when I run the stereo node with: `ros2 launch zed_wrapper zed_camera.launch.py camera_model:=zedx". How can these two be used for slam_toolbox and Nav2 stacks? Are these meant for increasing the accuracy with VIO, as it is mentioned here: Using VIO to Augment Robot Odometry — Nav2 1.0.0 documentation ?
Hi @doruk.sonmez,
If you wish to fuse odometry data using different sources, I would recommend following the tutorial from the Nav2 documentation: Using VIO to Augment Robot Odometry — Nav2 1.0.0 documentation
And setting the following parameters in the zed_ros_wrapper config yaml:
pos_tracking:
publish_tf: false # Disables odom -> base_link TF transformation
publish_map_tf: false # Disables map -> odom TF transformation, set this as false, nav2 documentation has a typo
area_memory: false # Disables loop closure computation, but Pose topic for global VSLAM still published (but now pure VIO)
# Optional optimizations
two_d_mode: false # Or true, up to you!
pos_tracking_enabled: true # of course!
path_max_count: 30
qos_depth: 5
This will allow using the robot_localization package to fuse the odometry from the ZED and from lidar and use slam_toolbox as your slam source.
1 Like