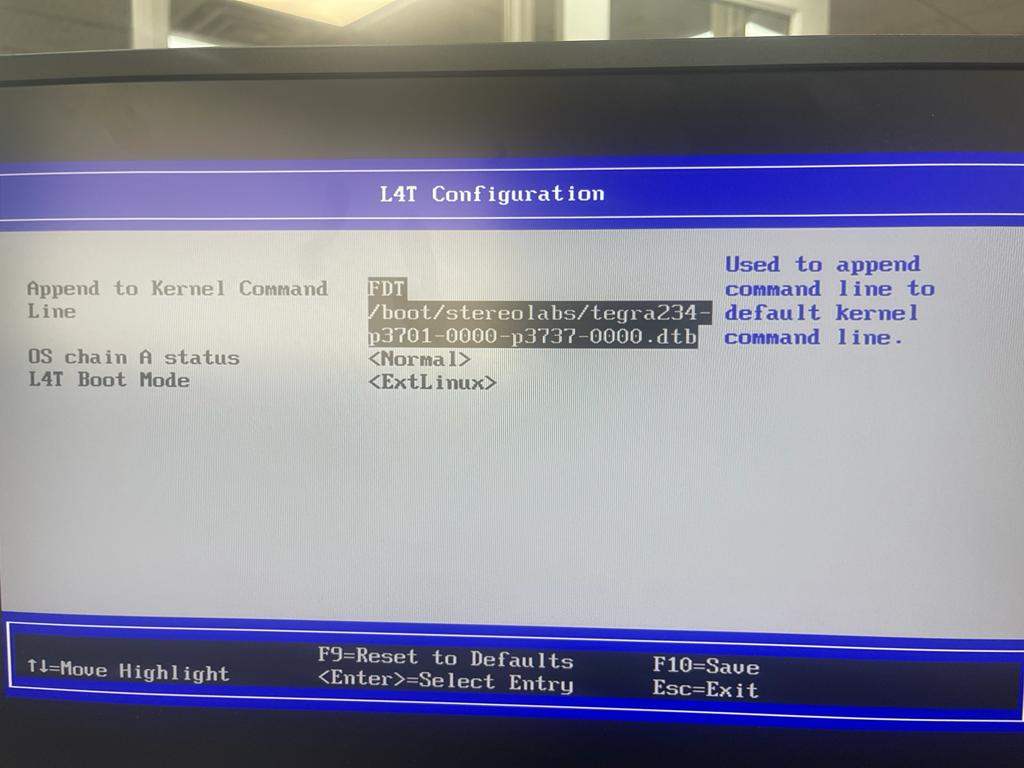
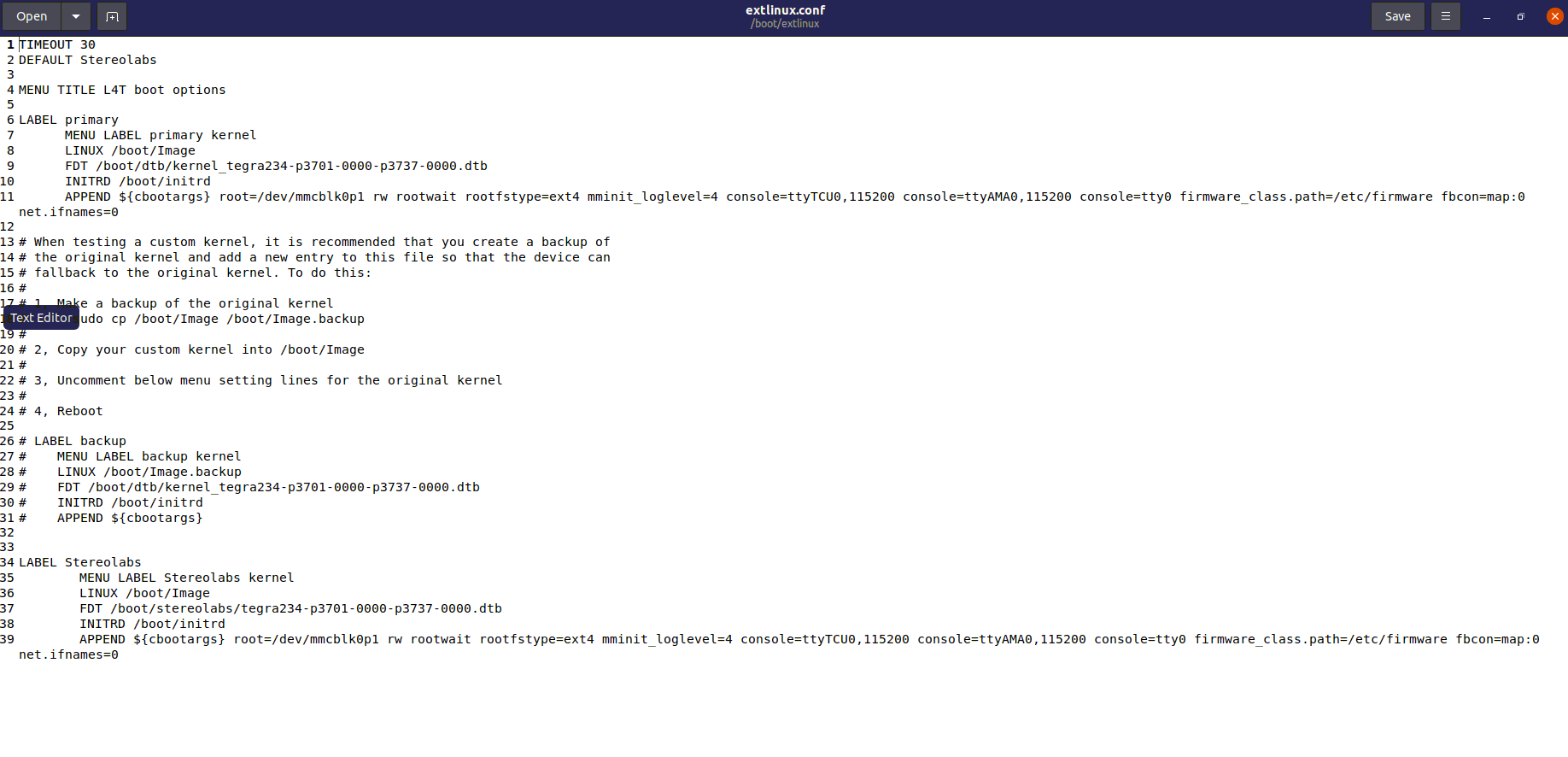
Getting error while installing ZedX camera driver on Jetson AGX Orin 64GB,
####################################
############ DMESG LOG #############
####################################
####################################
############ Driver list ###########
####################################
/usr/lib/modules/5.10.104-tegra/kernel/drivers/stereolabs/max96712/max96712.ko==> exists
/usr/lib/modules/5.10.104-tegra/kernel/drivers/stereolabs/zedx/sl_zedx.ko ==> exists
################################################
############ ZEDX Daemon Status LS #############
################################################
● zed_x_daemon.service - ZED-X Daemon service
Loaded: loaded (/etc/systemd/system/zed_x_daemon.service; enabled; vendor preset: enabled)
Active: active (running) since Tue 2023-04-25 21:37:46 PDT; 6min ago
Main PID: 1122 (ZEDX_Daemon)
Tasks: 3 (limit: 36321)
Memory: 10.7M
CGroup: /system.slice/zed_x_daemon.service
└─1122 /usr/local/zed/bin/ZEDX_Daemon
Apr 25 21:37:46 jetsonorin systemd[1]: Started ZED-X Daemon service.
Apr 25 21:37:46 jetsonorin ZEDX_Daemon[1122]: [ “Tue Apr 25 21:37:46 2023” ] ** Start ZED-X Daemon
Apr 25 21:37:47 jetsonorin ZEDX_Daemon[1122]: [ “Tue Apr 25 21:37:47 2023” ] Process “insmod /usr/lib/modules/5.10.104-tegra/kernel/drivers/stereolabs/max96712/max96712.ko” outputs “”
Apr 25 21:37:47 jetsonorin ZEDX_Daemon[1122]: [ “Tue Apr 25 21:37:47 2023” ] Process “rmmod sl_zedx” outputs “rmmod: ERROR: Module sl_zedx is not currently loaded\n”
Apr 25 21:37:47 jetsonorin ZEDX_Daemon[1122]: [ “Tue Apr 25 21:37:47 2023” ] Process “insmod /usr/lib/modules/5.10.104-tegra/kernel/drivers/stereolabs/zedx/sl_zedx.ko” outputs “”
Apr 25 21:37:47 jetsonorin ZEDX_Daemon[1122]: ** ZED-X Driver loaded
Apr 25 21:37:47 jetsonorin ZEDX_Daemon[1122]: [ “Tue Apr 25 21:37:47 2023” ] ** Created Endpoint “tcp://127.0.0.1:20026”
################################################
############ I2C Tracz /dev/i2C-30 #############
################################################
Error: Could not open file /dev/i2c-30' or /dev/i2c/30’: No such file or directory
################################################
############ I2C Tracz /dev/i2C-31 #############
################################################
Error: Could not open file /dev/i2c-31' or /dev/i2c/31’: No such file or directory
################################################
############ I2C Tracz /dev/i2C-32 #############
################################################
Error: Could not open file /dev/i2c-32' or /dev/i2c/32’: No such file or directory
################################################
############ I2C Tracz /dev/i2C-33 #############
################################################
Error: Could not open file /dev/i2c-33' or /dev/i2c/33’: No such file or directory
#########################