I am trying to find ‘rpy’ to provide to my urdf. Already got the ‘xyz’ (-0.002 -0.023 0.000) coordinates using logger by enabling publish_tf and echo. Any thoughts on this ?
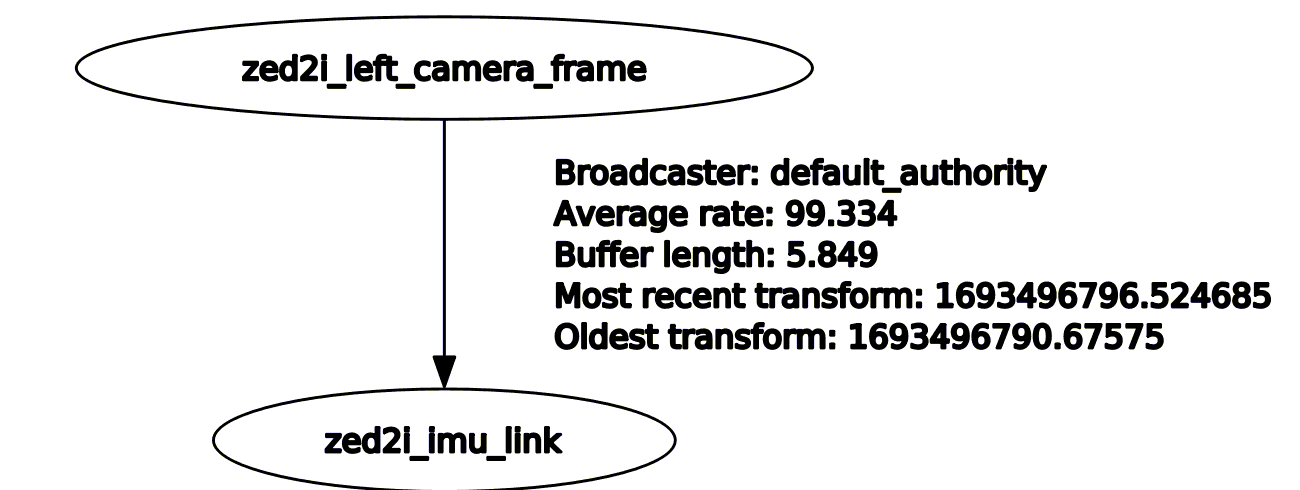
AS my first post I could not attach multiple media so added reply to myself for the tf2 echo.
Is there anyway to get that info from CLI the factory default measurements as I am going to hard code this into my URDF and disable publish_tf ? Or do I need to write a simple program to retrieve that first as you mentioned above using tf2 ? OR would you have values for Zed2i already which I can use ?
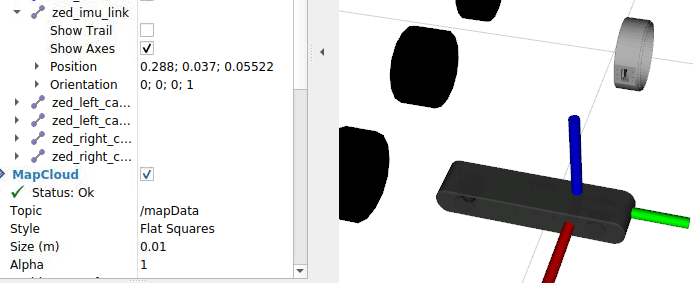
@Myzhar Thank you, that was quite easy to do. This is the resulting, I got below. I know for a fact that IMU is located towards left lens but to the precise location wise I would appreciate if you can confirm please.
@Myzhar I had just input the Camera-IMU translation vector which I got in logger before disabling the IMU tf on zed2i yaml file which gave me xyz for the position relative to parent and yes I did apply rpy from quaternion by converting to euler’s angle in radians to input into my urdf resulting in below.
Quaternion vector was [-0.002, -0.000, -0.004, 1.000]
Translation from Zed2i logger [-0.002 -0.023 0.00022]
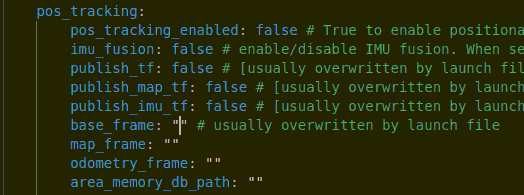
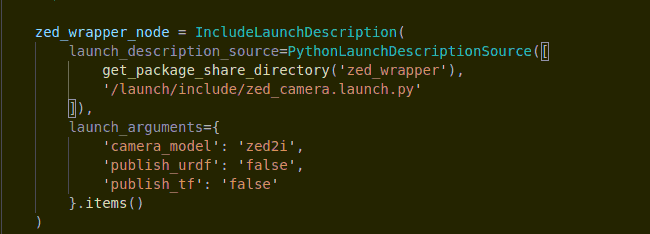
I have noticed after updating the SDK to 4.0.6, the IMU tf keeps getting published even after Publish_tf is false as I am publishing using my robot urdf. Some screenshots are below