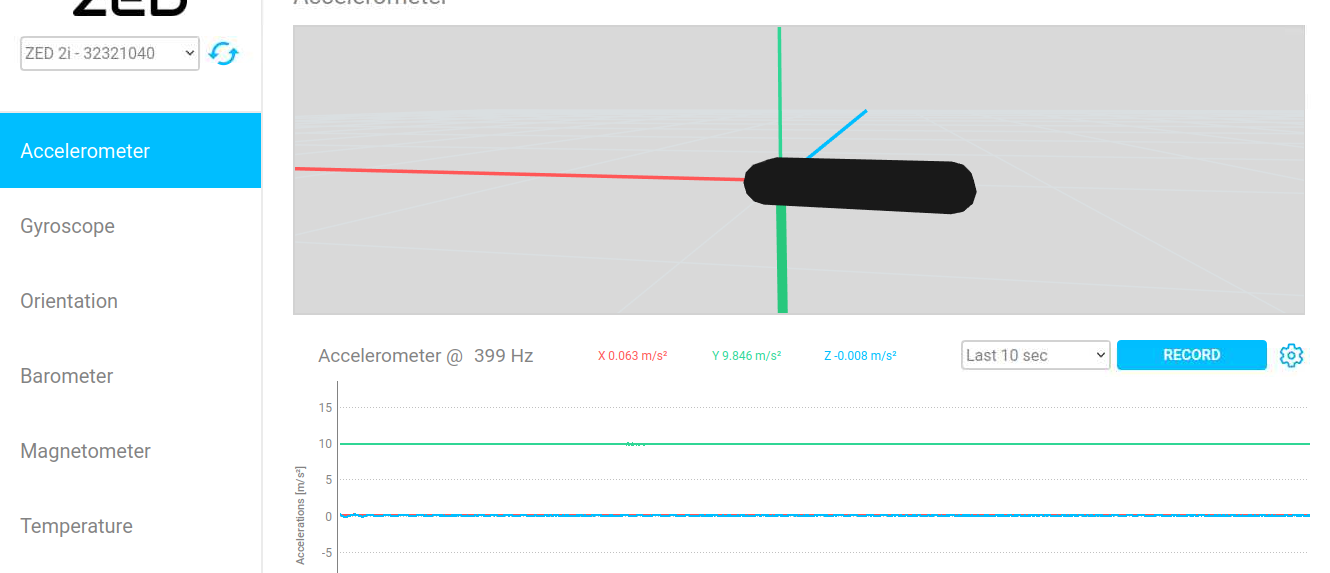
Just a quick question on IMU, currently I have Zed2i mounted at 10 degree angle and see in ZED_SensorView that acceleration being too high and when fusing with ekf node, I see robot spins on axis in 2D mode.
Do I need to calibrate the IMU at this height for my application ? As this elevated angle value should be negated from the fusing part to overcome.
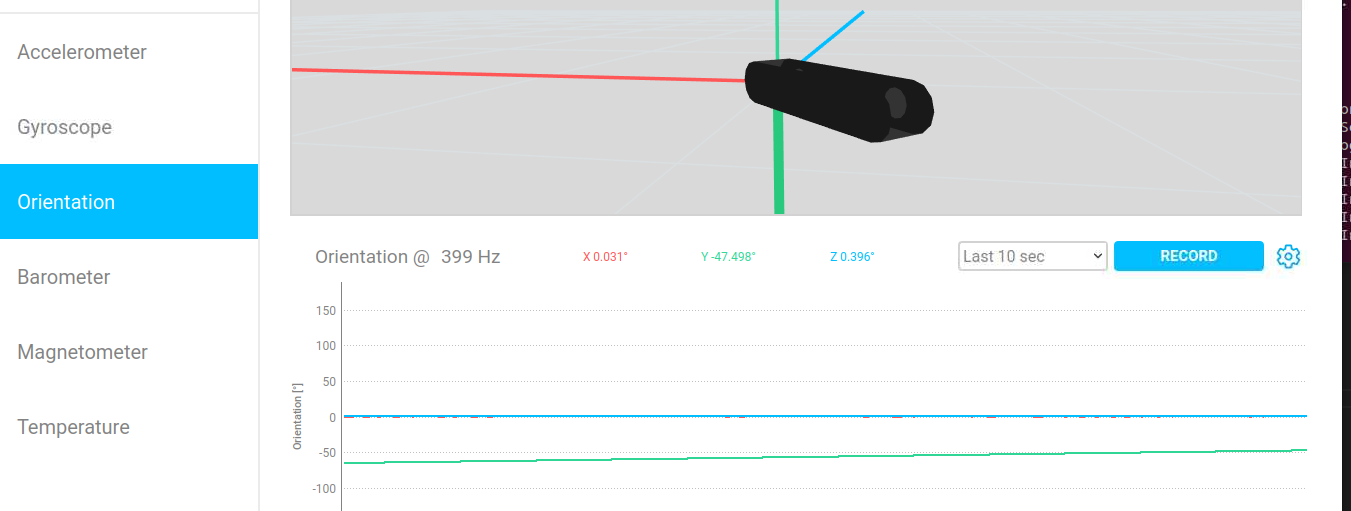
I did calibrate IMU on flat table using sensor view --calib-imu, but the weird part is I see the camera rotating in Sensor View, it does not stay still.
Hi @anath93
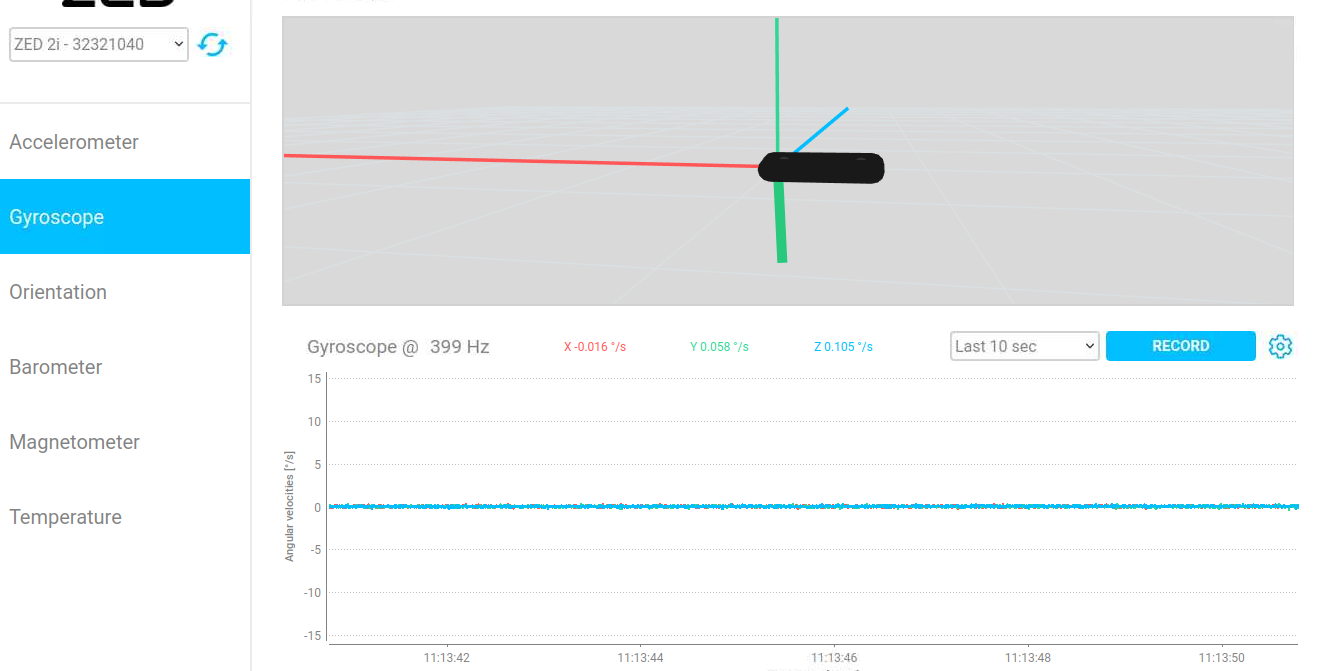
acceleration values are correct. The drift can be caused by the angular velocity biases not being correctly compensated.
Can you post the screenshot of the Gyroscope plot?
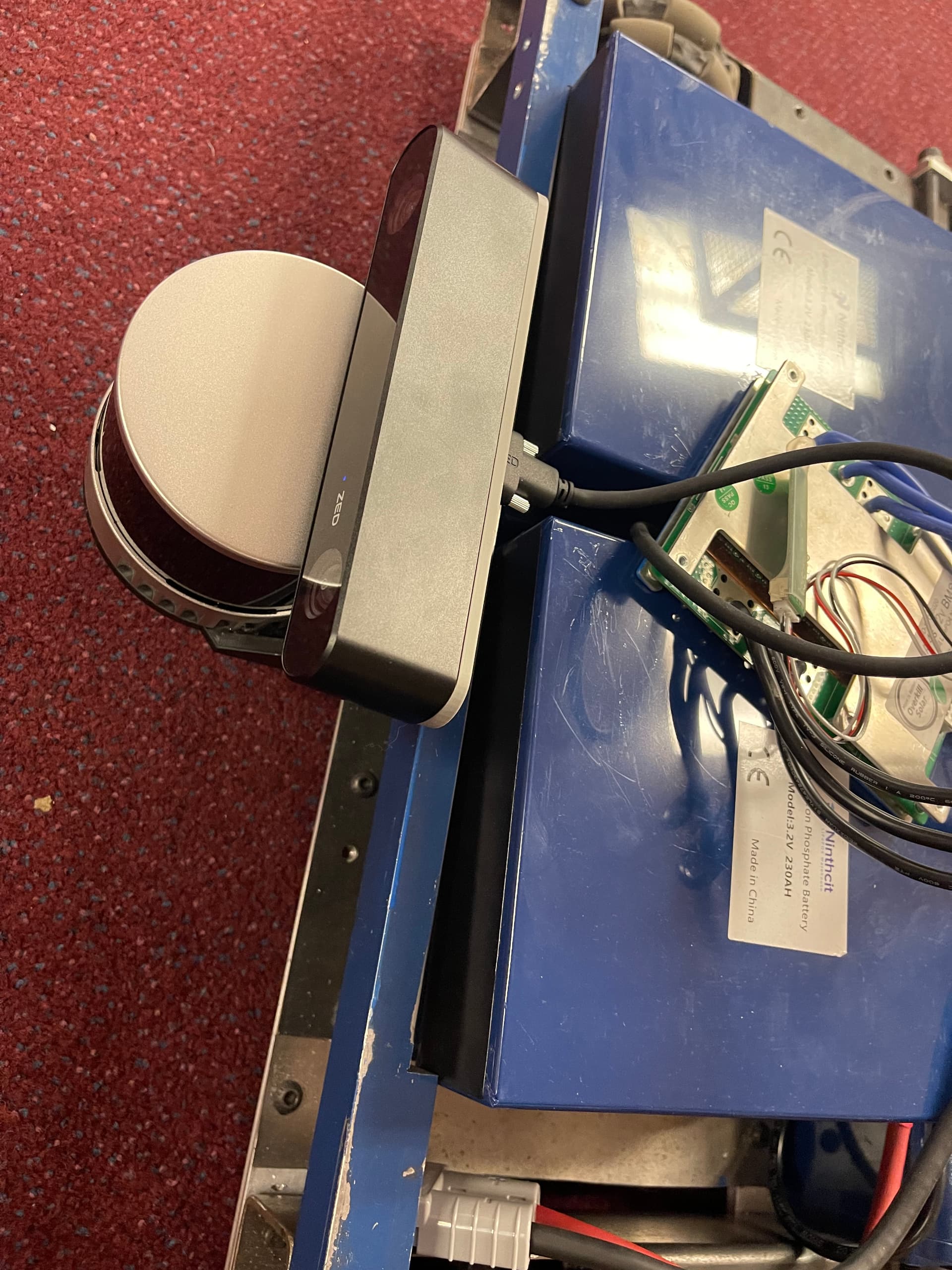
Where is the camera mounted? Is there a fan spinning fast that can add noise to the gyroscope measurements?
The lidar has a spinning mirror inside it that can introduce false Gyroscope reading if the camera is placed too close to it.
I recommend placing the ZED (and other IMU devices) far from active lidar sensors and spinning fans to avoid them entering resonance and introducing false angular velocity readings.
You can also add vibration dumps between the camera and the mounting surface to reduce the vibrations.