Hi,
I’m working with a Zed2i.
We will put it in a car, heading front. We detect objects, that we place on a map.
The car’s heading (and so the camera’s) is given by a GPS.
The problem is, when we drive backwards, the heading is going backwards too and we project objects behind the car.
How can I detect that the car is running backwards ?
I tried using the IMU. I recorded a SVO, walking forwards then backwards.
sensors_data = sl.SensorsData()
accelerometer_csv = open('/home/georges/Workspace/test_accelerometre/accelerometer.csv', 'w+')
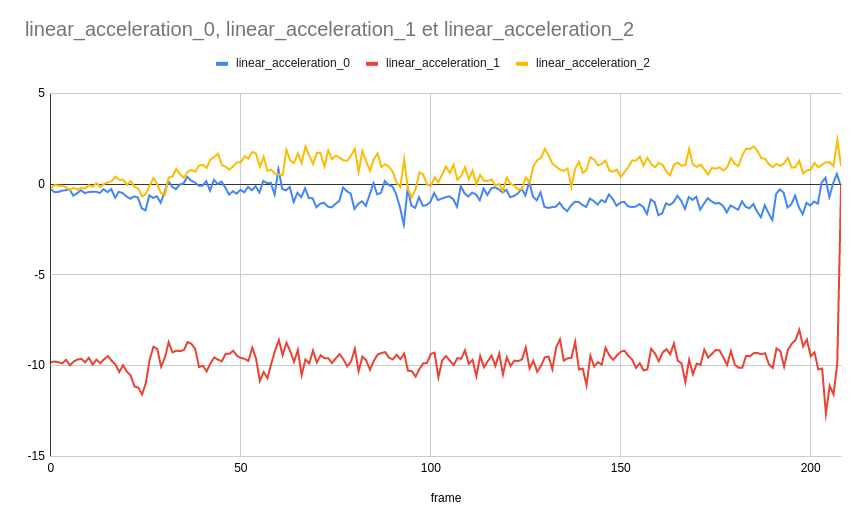
accelerometer_csv.write("frame;linear_acceleration_0;linear_acceleration_1;linear_acceleration_2\n")
while zed.grab(rt_param) == sl.ERROR_CODE.SUCCESS and svo_position < end_frame:
svo_position = zed.get_svo_position()
zed.get_sensors_data(sensors_data, sl.TIME_REFERENCE.IMAGE) # Retrieve only frame synchronized data
# Extract IMU data
imu_data = sensors_data.get_imu_data()
# Retrieve linear acceleration and angular velocity
linear_acceleration = imu_data.get_linear_acceleration()
angular_velocity = imu_data.get_angular_velocity()
accelerometer_csv.write(f"{svo_position};{linear_acceleration[0]};{linear_acceleration[1]};{linear_acceleration[2]}\n")
But I cannot read the graph, telling on which part I was walking forwards (frames 40 to 100), and which part I was walking backwards (frames 120 to 190).
Note that I tried with sl.TIME_REFERENCE.LAST and sl.TIME_REFERENCE.CURRENT too.