Hi Community!
I am currently working with the Husky A200 robot platform using the Gazebo simulator and ROS 2 Humble. I have successfully integrated a ZED2 camera by configuring the robot.yaml file, following Clearpath’s official documentation. The camera image appears to work correctly when I launch the simulation.
However, I am encountering issues related to TF frames and point cloud alignment. The point cloud is displayed at an incorrect angle in RViz.
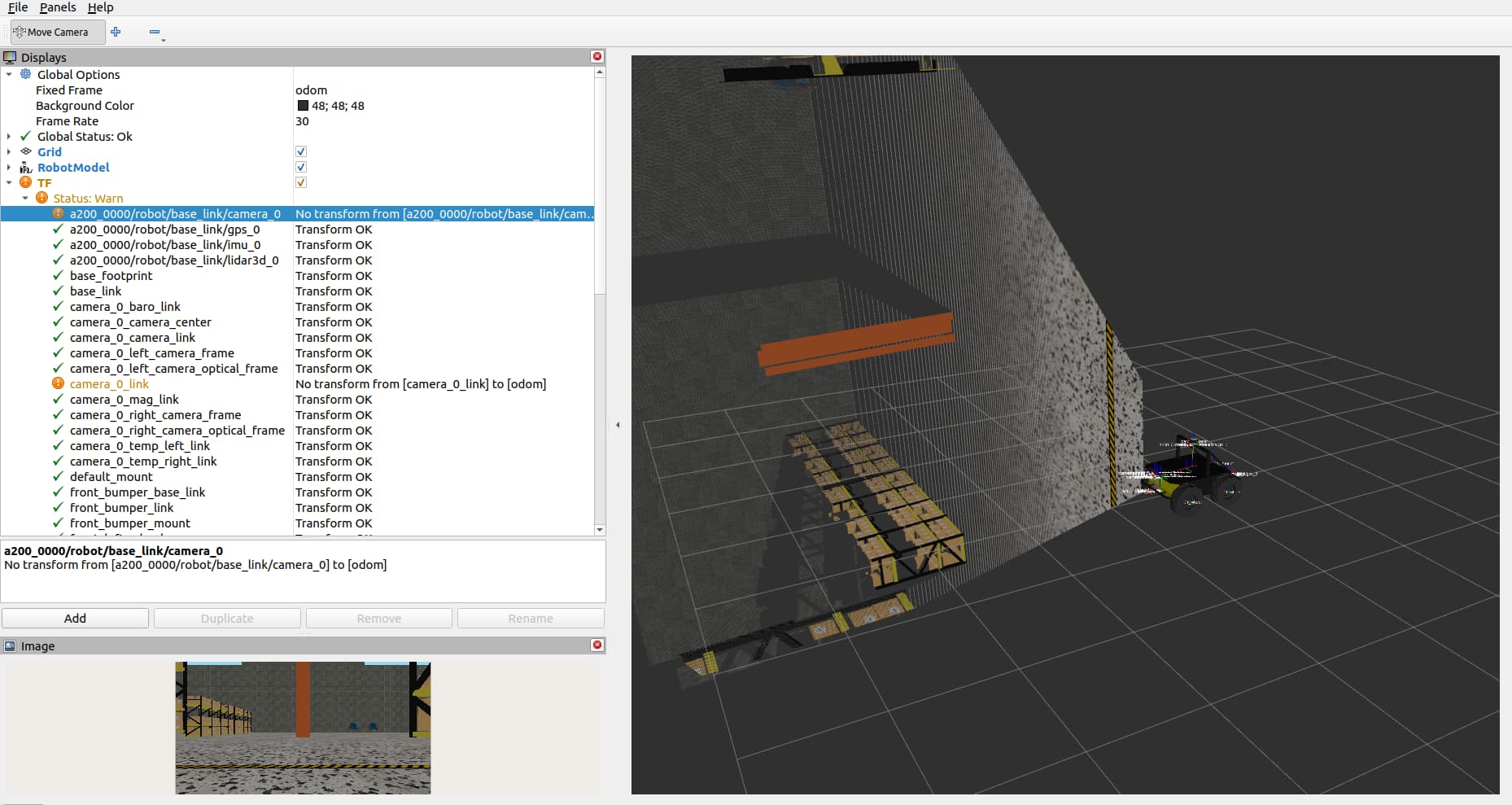
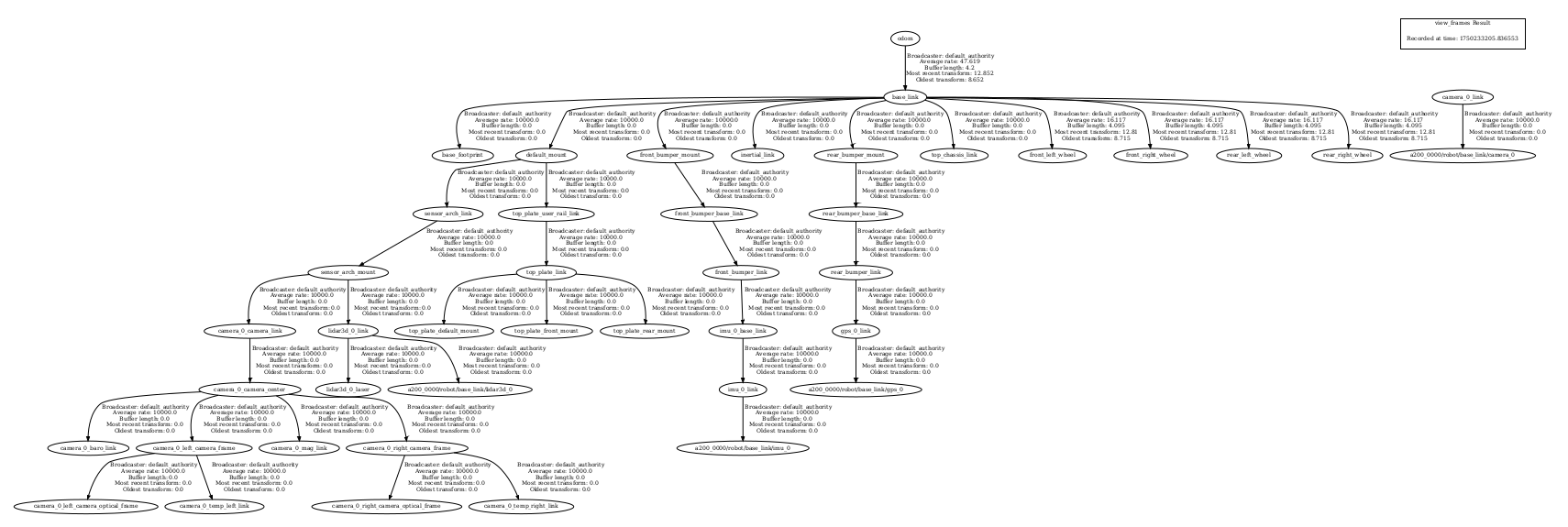
Additionally, I receive two warning messages about the camera when visualizing it. Using tf2 tools, I noticed that the camera frames are completely disconnected from the main TF tree.
I have attempted to manually fix the TF connections by modifying the launch files, but these changes are overwritten when I relaunch the simulator.
Disabling the camera node to prevent these issues causes the image stream to stop working entirely.
I have tried several approaches, including editing the parent link and adjusting frame IDs, but nothing resolved the disconnection.
I suspect the problem is related to how the static transform is generated or named in the default configuration.
Could you please advise how to properly connect the ZED2 TF frames to the robot’s base frame in this simulation setup?
Any guidance would be greatly appreciated.
Best regards,
Adam