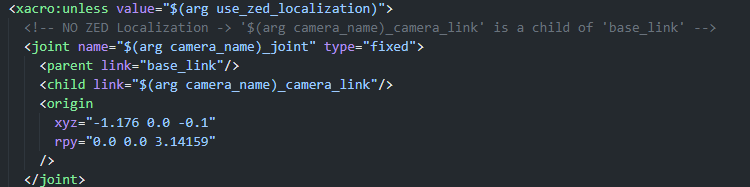
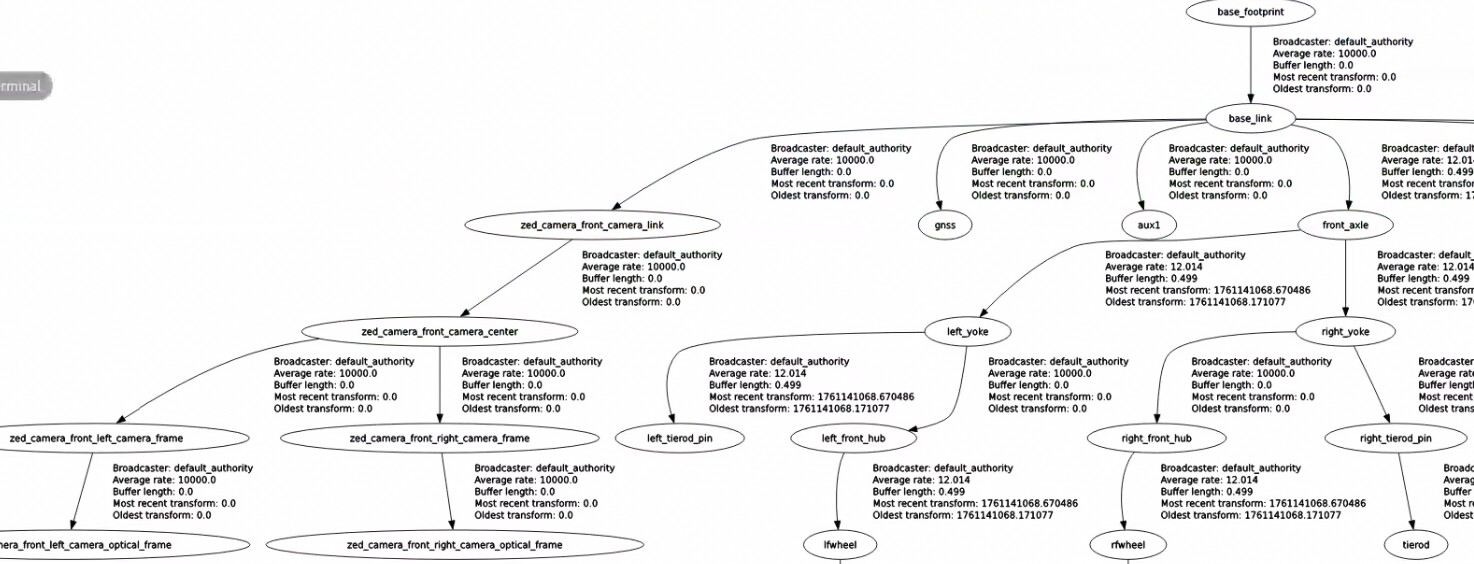
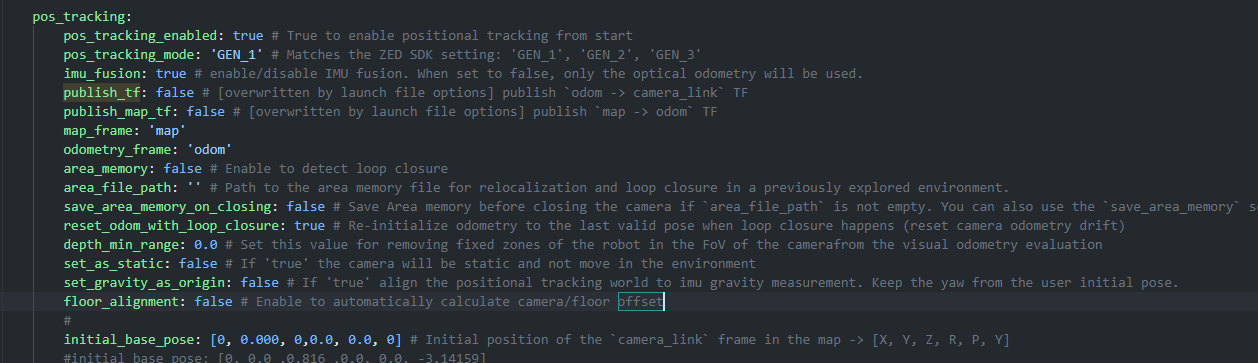
With this setup, you must set publish_tf to false and handle the transformation of the odom and pose messages from the zed_xxx_yyy_camera_link frame to the base_link frame.
Thanks for your feedback. The set up is at publish_tf: False. My target goal is feeding the odom pose topic to robot_localization packages for sensor fusion. Could you please elaborate on the the transformation part?