Hello.
I’m trying to work with my setup of Zed X with a GMSL board (ZED Link Capture Card Mono) connected to a Jetson Orin Nano Devkit. I’m facing the dreaded Argus Timeout error, but it does not seem consistent. Sometimes, the tools included with the SDK work fine, sometimes they stop working after some time passes, and sometimes they immediately crash with:
(Argus) Error Timeout: (propagating from src/rpc/socket/client/ClientSocketManager.cpp, function send(), line 137)
(Argus) Error Timeout: (propagating from src/rpc/socket/client/SocketClientDispatch.cpp, function dispatch(), line 91)
or
[2025-11-18 12:42:50 UTC][ZED][INFO] Logging level INFO
[2025-11-18 12:42:51 UTC][ZED][INFO] Using GMSL input... Switched to default resolution HD1200
[2025-11-18 12:42:52 UTC][ZED][INFO] [Init] Camera FW version: 2001
[2025-11-18 12:42:52 UTC][ZED][INFO] [Init] Video mode: HD1200@30
[2025-11-18 12:42:52 UTC][ZED][INFO] [Init] Serial Number: S/N 41165475
[2025-11-18 12:42:52 UTC][ZED][INFO] [Init] Depth mode: NEURAL LIGHT
(Argus) Error Timeout: (propagating from src/rpc/socket/client/ClientSocketManager.cpp, function send(), line 137)
(Argus) Error Timeout: (propagating from src/rpc/socket/client/SocketClientDispatch.cpp, function dispatch(), line 92)
(Argus) Error Timeout: (propagating from src/rpc/socket/client/ClientSocketManager.cpp, function send(), line 137)
(Argus) Error Timeout: (propagating from src/rpc/socket/client/SocketClientDispatch.cpp, function dispatch(), line 92)
[2025-11-18 12:43:22 UTC][ZED][ERROR] [Init] Corrupted frames detected. Check that your camera is connected properly.
[2025-11-18 12:43:26 UTC][ZED][ERROR] FAILURE in sl::ERROR_CODE sl::Camera::open(sl::InitParameters)
The same goes for the diagnostic tool - the diagnostic sometimes passes saying that everything should be working fine, when the camera is clearly not initialized, or right as Argus is throwing socket reading errors:
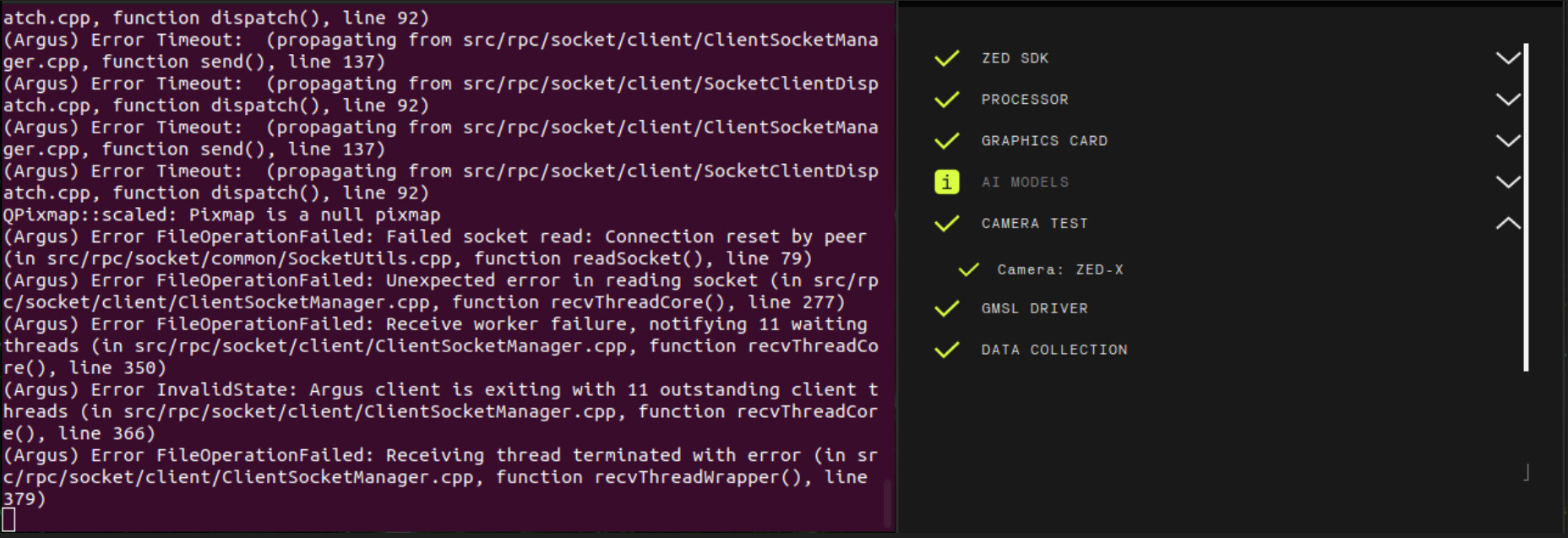
So far I have tried downgrading JetPack and L4T, different versions of SDK and driver, but this behavior remains consistently inconsistent.
At one point I managed to get far enough by restarting nvargus and zed_x daemons, but when I actually tried to do something with the output itself - by running the ros2 wrapper, it seemed to work, before hanging on ‘CAMERA REBOOTING’ (it didn’t). I was following this tutorial: Setting up Isaac™ ROS to work with ZED Cameras in ROS 2 - Stereolabs
My general assumptions/questions are:
- Can this be caused by software incompatibilities? Something like a patch version difference in L4T and SDK requirements? Incorrectly installed drivers? The checks pass both during installation and diagnostics though.
- Can this be a hardware issue? I’m not very experienced at tinkering with Jetson hardware, but I did follow the tutorials provided by NVIDIA. Jetson is set to MAXN SUPER mode and should be configured correctly.
I’m also including a diagnostics report:
https://drive.google.com/file/d/1waM2qc8j8K1lbXiv93SyQI65FKdkqUkC/view?usp=sharing
Any idea what could I be doing wrong? Thanks.