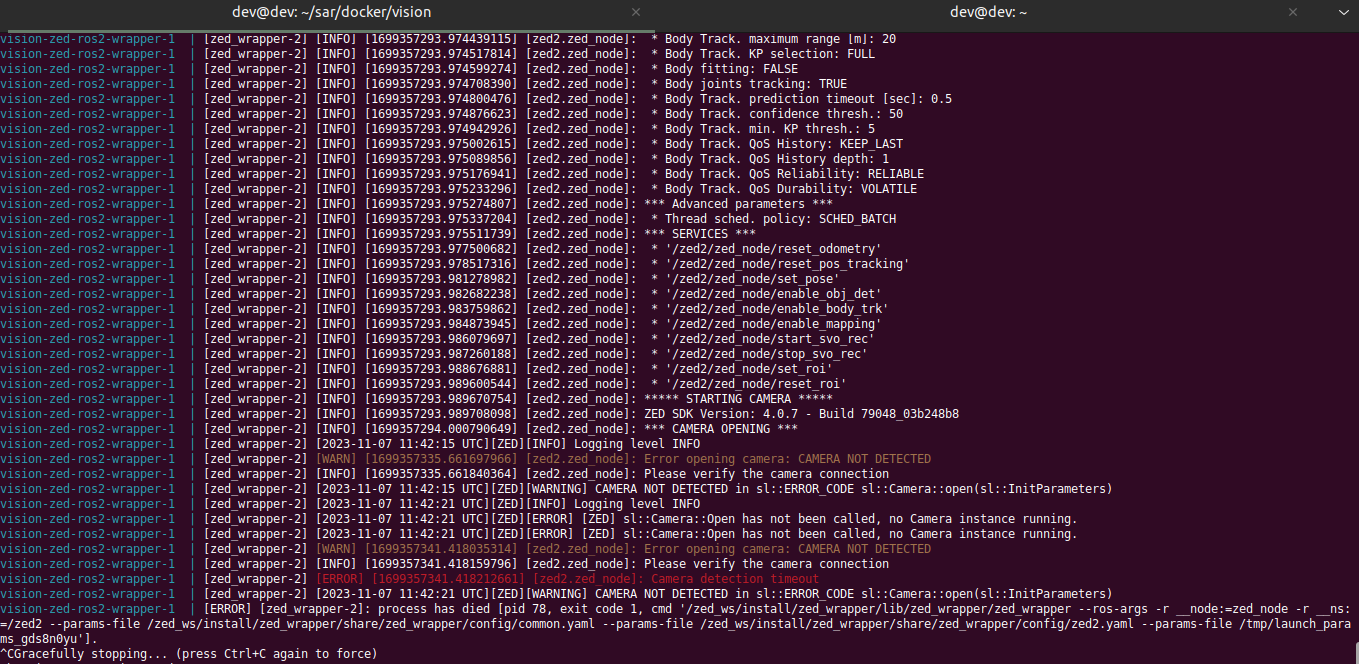
Hi i am trying to use zed-ros2-wrapper with svo file. I have recorded some svo files from zed camera and installed zed camera with different device, but when i am trying to “ros2 launch zed_wrapper zed_camera.launch.py camera_model:= svo_path:=<full_path_to_svo_file>” and use svo file it keep giving me camera not detected, how can i close detection of camera and use svo file only.
Hi @ashvni-solaris
Welcome to the Stereolabs community.
Can you post the command that you used to start the node?
This is the correct syntax:
$ ros2 launch zed_wrapper zed_camera.launch.py camera_model:=<camera_model> svo_path:=<svo_path>
For example:
$ ros2 launch zed_wrapper zed_camera.launch.py camera_model:=zed2 svo_path:=/home/walter/Documents/SVO/ZED2_HD2K_SN24605000_Lake_H265.svo
Can you check the console log to see if the svo_path parameter is correctly set?
[...]
[zed_wrapper-2] [INFO] [1699364717.938133939] [zed.zed_node]: *** GENERAL parameters ***
[zed_wrapper-2] [INFO] [1699364717.938148355] [zed.zed_node]: * SVO: '/home/walter/Documents/SVO/ZED2_HD2K_SN24605000_Lake_H265.svo'
[zed_wrapper-2] [INFO] [1699364717.938158529] [zed.zed_node]: * SVO Loop: FALSE
[zed_wrapper-2] [INFO] [1699364717.938169143] [zed.zed_node]: * SVO Realtime: TRUE
[zed_wrapper-2] [INFO] [1699364717.938182578] [zed.zed_node]: * Camera model: zed2 - ZED 2
[...]
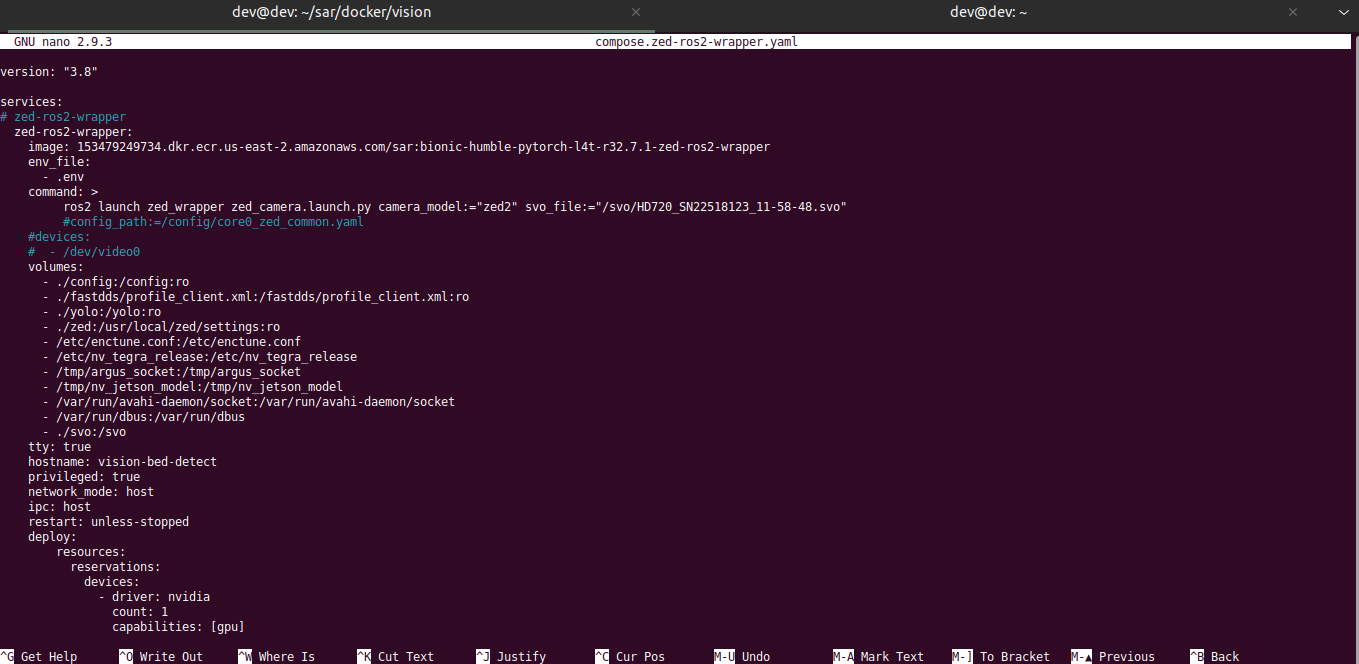
yes got it working in my docker compose file i was messing up with spaces, btw i have other question as well if i can ask here or need to open new topic?
but suddenly i have started getting this warning “[WARN] [1699434490.695633537] [zed2.zed_node]: !!! general.grab_frame_rate value is not valid: ‘30’. Automatically replaced with ‘47’. Please fix the parameter !!!” and svo file doesnt work
Hi @ashvni-solaris
this is a weird error message indeed.
Can you please share the SVO with me for debugging? Please send it to support@stereolabs.com if you cannot share it publicly.
shared over email please take a look and tell me,
also please tell me how i can visualise data outside container using rviz2.
also please tell me what this warning means "[zed_wrapper-2] Warning: Invalid frame ID “zed2_left_camera_frame” passed to canTransform argument target_frame - frame does not exist
vision-zed-ros2-wrapper-1 | [zed_wrapper-2] at line 93 in /opt/ros/humble/src/geometry2/tf2/src/buffer_core.cpp
" so many question but i am new to zed and ros and have so many doubts
This is not a problem as far as the docker image can access the local network.
You renamed the frame in some way. You must be sure to follow the conventions described in the documentation
I am connected to same network and on one system i am able to visualise using rviz2 over there i have cuda installed.
On other system i dont have cuda but in that i am not able to visualise even ros2 topic list only shows
/parameter_events
/rosout
I know i might be missing something please help
I recommend searching the internet for the correct configuration. ROS 2 dedicated forums are the recommended source for this kind of problems