Hi there,
I am working on a project that requires connecting a Jetson Orin Nano 8GB with a ZED2i. I am exploring options for on-board autonomous navigation on a drone and have a few questions I’d like to discuss:
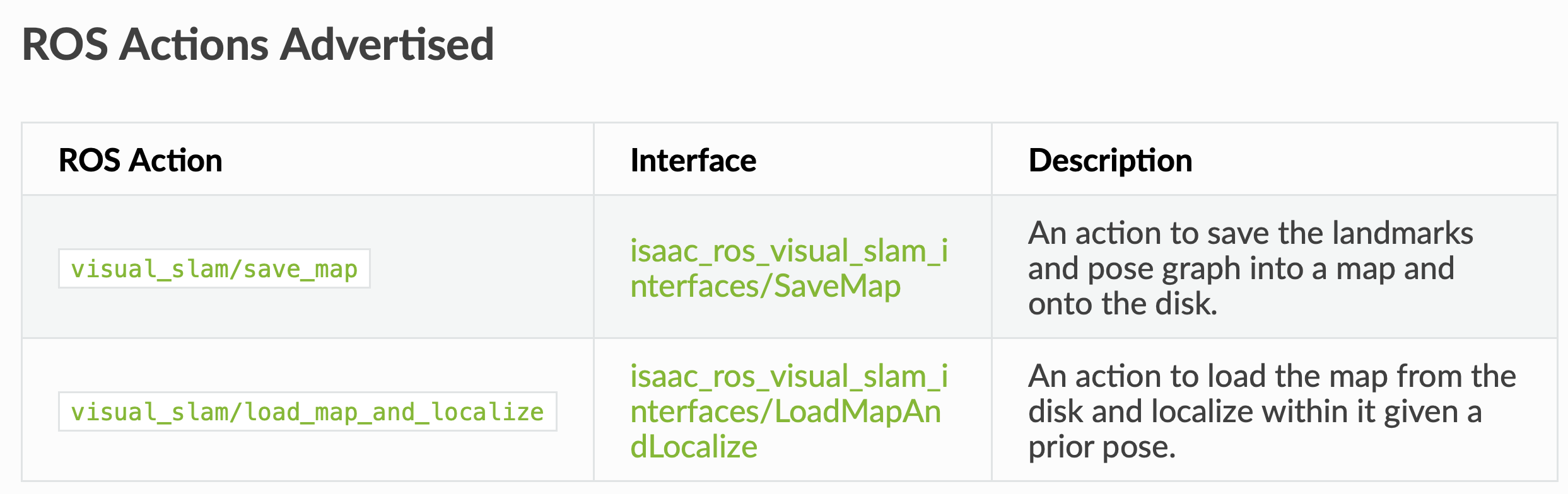
- Is it possible to use the SLAM landmarks created by the ZED ROS2 wrapper to relocalize the camera? I couldn’t find a related topic or service. An example is the Isaac ROS Visual SLAM action, which loads a saved map and relocalizes the robot.
-
Is there a way to obtain multiple cost maps from the depth cloud? I would like to use Nav2 to compute navigation paths for a drone (with the ZED2i on board) at different levels.
-
Related to the second question, is there a Nav2 plugin that facilitates this kind of navigation?
Thanks in advance for your help!