leonel
September 18, 2025, 9:03am
1
Hi,
I am using a zedxm camera to publish odometry and then fusing cam odom with wheels odom. The camera is 0.33 cm ahead of base_link, and is configured on the xacro model. However, it seems the cam odom messages are on cam_frame and not on base_link. Is there a way to get the cam odom on the base_link frame?
Myzhar
September 18, 2025, 9:54am
2
Please learn more about this by reading the Robot Integration documentation.
leonel
September 18, 2025, 10:12am
3
Hi @Myzhar ,
I have already followed this link to integrate the zed.
Here is the xml that I have on the xacro. The tf tree is in accordance with what is stated in its documentation.
<xacro:unless value="$(arg use_zed_localization)">
<joint name="front_cam_joint" type="fixed">
<parent link="base_link"/>
<child link="front_cam_camera_link"/>
<origin rpy="0.0 0.0 0.0" xyz="0.33 0.0 0.4" />
</joint>
</xacro:unless>
Now, I want to get the cam odom on the base_link and not on the cam frame. Is it a limitation of the wrapper or an issue on my side?
Myzhar
September 18, 2025, 4:29pm
4
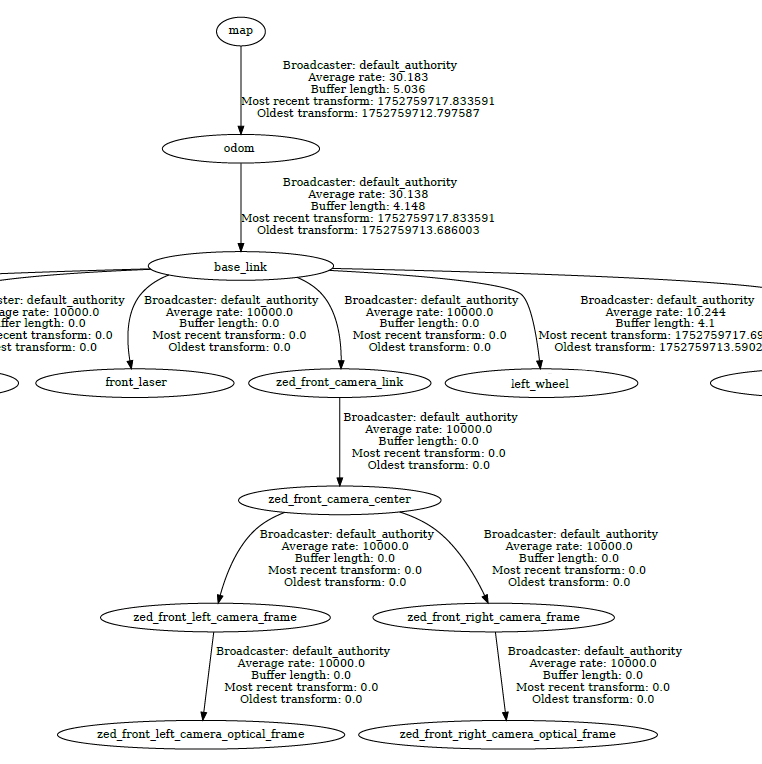
Please send a picture of your TF Tree.rqt to generate it
Myzhar
September 26, 2025, 1:35pm
6
The TF tree is correct. To obtain the odometry in the base_link frame you can use TF tools to transform it.