sergii
November 26, 2025, 8:33am
1
Hello.
Is it possible to recommend how to extract parameters from ZED_explorer and apply them to the wrapper configuration?
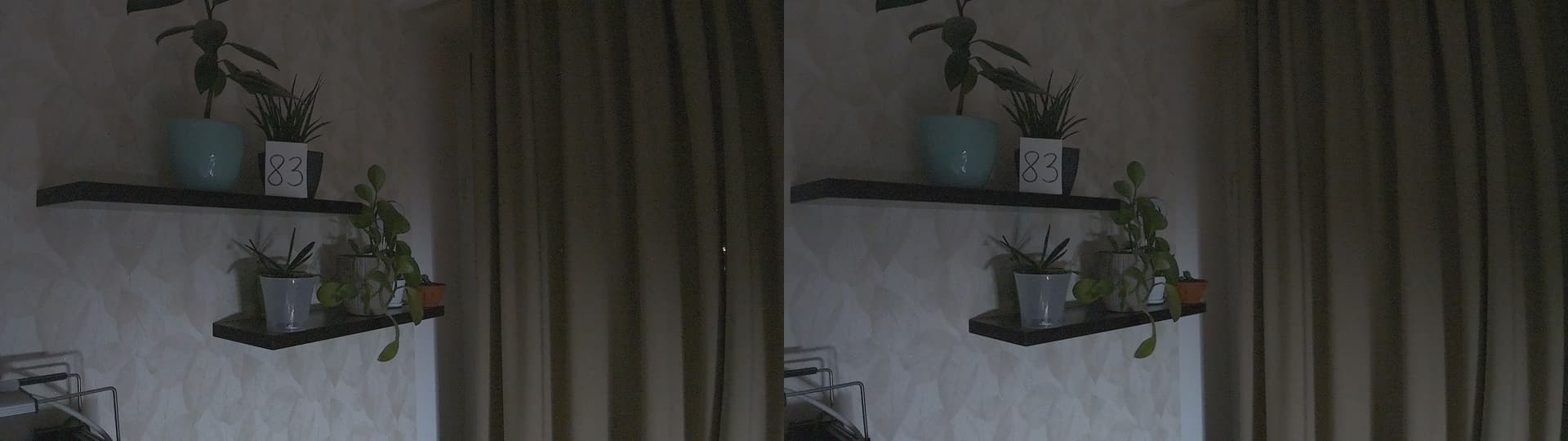
I tried to apply visible parameters as: saturation, sharpness, gamma,turn white_balance and exposure to auto and use the same denoising and exp. compensation but the picture is still different. A lot of noise in the picture.
ros2_wrapper
zedxm.yaml
video:
exposure_time: 16666
auto_exposure_time_range_min: 28
auto_exposure_time_range_max: 16666
exposure_compensation: 50
analog_gain: 8000
auto_analog_gain_range_min: 1000
auto_analog_gain_range_max: 16000
digital_gain: 128
auto_digital_gain_range_max: 256
denoising: 50
common-stereo.yaml
saturation: 4
sharpness: 1
gamma: 6
auto_exposure_gain: true
exposure: 100
gain: 97
auto_whitebalance: true
whitebalance_temperature: 42
enable_24bit_output: false
publish_rgb: false
publish_left_right: true
publish_raw: false
publish_gray: false
publish_stereo: false
I also tried to change the gamma to 2; the noise was lower, but the image was darker.
And I would prefer a setting with auto configuration. No one canceled the day.
Once again. ZED_Explorer can show a good picture, I need it in ros2_wrapper. Help me with it, please.
I really appreciate any help you can provide.
Myzhar
November 26, 2025, 9:31am
2
Hi @sergii Stereolabs community.
You must perform this manually.
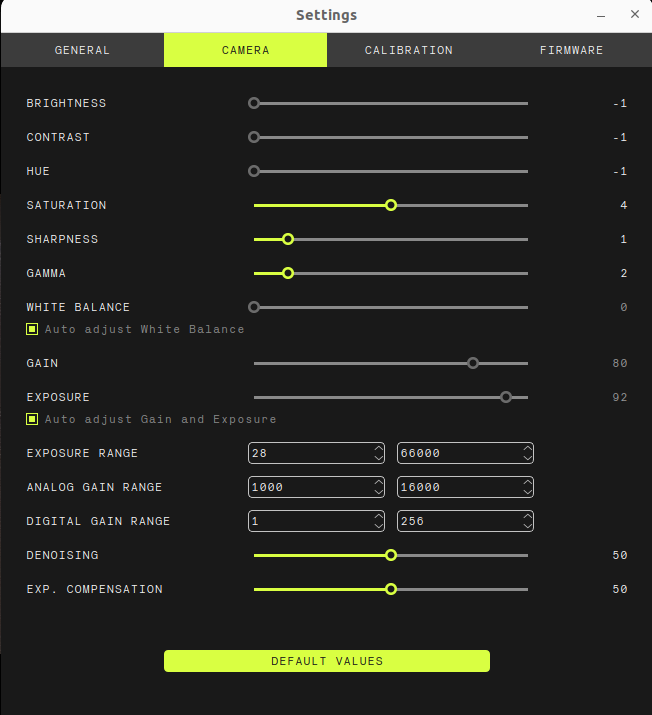
Please take a screenshot of the Camera Settings in ZED Explorer and share it here. I will help you set up the ROS 2 Wrapper the same.
sergii
November 26, 2025, 12:48pm
3
Hello Myzhar,
Here is my screenshot with the current settings from ZED_Explorer
I tried to apply these parameters, but I think there must be something else that can affect quality.
Myzhar
November 26, 2025, 1:38pm
4
Please enable Camera Control debug information:
thread_sensor_priority: 70 # ONLY with 'SCHED_FIFO' and 'SCHED_RR' - [1 (LOW) z-> 99 (HIGH)] - NOTE: 'sudo' required
thread_pointcloud_priority: 60 # ONLY with 'SCHED_FIFO' and 'SCHED_RR' - [1 (LOW) z-> 99 (HIGH)] - NOTE: 'sudo' required
debug:
sdk_verbose: 1 # Set the verbose level of the ZED SDK
sdk_verbose_log_file: '' # Path to the file where the ZED SDK will log its messages. If empty, no file will be created. The log level can be set using the `sdk_verbose` parameter.
use_pub_timestamps: false # Use the current ROS time for the message timestamp instead of the camera timestamp. This is useful to test data communication latency.
debug_common: false
debug_sim: false
debug_video_depth: false
debug_camera_controls: false
debug_point_cloud: false
debug_positional_tracking: false
debug_gnss: false
debug_sensors: false
debug_mapping: false
debug_terrain_mapping: false
debug_object_detection: false
debug_body_tracking: false
debug_roi: false
debug_streaming: false
Then, copy and paste here the full node log to allow me to check that everything goes as expected.
sergii
November 26, 2025, 2:27pm
5
just a log here
\[+\] Running 1/1
✔ Container zed-ros2 Created 0.0s
Attaching to zed-ros2
zed-ros2 | ZED ROS2 Docker Image
zed-ros2 | ---------------------
zed-ros2 | ROS distro: humble
zed-ros2 | DDS middleware: rmw_cyclonedds_cpp
zed-ros2 | ROS 2 Workspaces: /root/ros2_ws/install:/opt/ros/humble/install
zed-ros2 | ROS 2 Domain ID: 0
zed-ros2 | \* Note: Host and Docker image Domain ID must match to allow communication
zed-ros2 | Local IPs: 192.168.2.138 172.17.0.1
zed-ros2 | —
zed-ros2 | Available ZED packages:
zed-ros2 | zed_components
zed-ros2 | zed_msgs
zed-ros2 | zed_ros2
zed-ros2 | zed_wrapper
zed-ros2 | ---------------------
zed-ros2 | To start a ZED camera node:
zed-ros2 | ros2 launch zed_wrapper zed_camera.launch.py camera_model:=<zed|zedm|zed2|zed2i|zedx|zedxm|zedxonegs|zedxone4k|zedxonehdr|virtual>
zed-ros2 | ---------------------
zed-ros2 | \[INFO\] \[launch\]: All log files can be found below /root/.ros/log/2025-11-26-15-06-22-170813-zedbox-m-1
zed-ros2 | \[INFO\] \[launch\]: Default logging verbosity is set to INFO
zed-ros2 | \[INFO\] \[launch.user\]: Using common configuration file: /root/ros2_ws/install/zed_wrapper/share/zed_wrapper/config/common_stereo.yaml
zed-ros2 | \[INFO\] \[launch.user\]: Using camera configuration file: /root/ros2_ws/install/zed_wrapper/share/zed_wrapper/config/zedxm.yaml
zed-ros2 | \[INFO\] \[launch.user\]: Using Object Detection configuration file: /root/ros2_ws/install/zed_wrapper/share/zed_wrapper/config/object_detection.yaml
zed-ros2 | \[INFO\] \[launch.user\]: Using Custom Object Detection configuration file: /root/ros2_ws/install/zed_wrapper/share/zed_wrapper/config/custom_object_detection.yaml
zed-ros2 | \[INFO\] \[launch.user\]: Loading ZED node `zed_node` in container `/zed/zed_container`
zed-ros2 | \[INFO\] \[robot_state_publisher-1\]: process started with pid \[85\]
zed-ros2 | \[INFO\] \[component_container_isolated-2\]: process started with pid \[87\]
zed-ros2 | \[robot_state_publisher-1\] \[INFO\] \[1764165983.027764855\] \[zed.zed_state_publisher\]: got segment zed_camera_center
zed-ros2 | \[robot_state_publisher-1\] \[INFO\] \[1764165983.027933947\] \[zed.zed_state_publisher\]: got segment zed_camera_link
zed-ros2 | \[robot_state_publisher-1\] \[INFO\] \[1764165983.027952923\] \[zed.zed_state_publisher\]: got segment zed_left_camera_frame
zed-ros2 | \[robot_state_publisher-1\] \[INFO\] \[1764165983.027963675\] \[zed.zed_state_publisher\]: got segment zed_left_camera_optical_frame
zed-ros2 | \[robot_state_publisher-1\] \[INFO\] \[1764165983.027972092\] \[zed.zed_state_publisher\]: got segment zed_right_camera_frame
zed-ros2 | \[robot_state_publisher-1\] \[INFO\] \[1764165983.027979868\] \[zed.zed_state_publisher\]: got segment zed_right_camera_optical_frame
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.300736013\] \[zed.zed_container\]: Load Library: /root/ros2_ws/install/zed_components/lib/libzed_camera_component.so
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.389632151\] \[zed.zed_container\]: Found class: rclcpp_components::NodeFactoryTemplate<stereolabs::ZedCamera>
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.389778235\] \[zed.zed_container\]: Instantiate class: rclcpp_components::NodeFactoryTemplate<stereolabs::ZedCamera>
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.478428319\] \[zed.zed_node\]: ================================
zed-ros2 | \[INFO\] \[launch_ros.actions.load_composable_nodes\]: Loaded node ‘/zed/zed_node’ in container ‘/zed/zed_container’
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.478530754\] \[zed.zed_node\]: ZED Camera Component
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.478552322\] \[zed.zed_node\]: ================================
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.478571203\] \[zed.zed_node\]: \* namespace: /zed
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.478587523\] \[zed.zed_node\]: \* node name: zed_node
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.478601636\] \[zed.zed_node\]: \* IPC: enabled
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.478613220\] \[zed.zed_node\]: ================================
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.528986263\] \[zed.zed_node\]: === DEBUG parameters ===
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.529433793\] \[zed.zed_node\]: \* SDK Verbose: 1
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.529651783\] \[zed.zed_node\]: \* Use Pub Timestamps: FALSE
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.529803274\] \[zed.zed_node\]: \* SDK Verbose File:
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.530048400\] \[zed.zed_node\]: \* Debug Common: FALSE
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.530329431\] \[zed.zed_node\]: \* Debug Simulation: FALSE
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.530599645\] \[zed.zed_node\]: \* Debug Video/Depth: FALSE
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.530804738\] \[zed.zed_node\]: \* Debug Control settings: TRUE
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.530948422\] \[zed.zed_node\]: \* Debug Point Cloud: FALSE
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.531054344\] \[zed.zed_node\]: \* Debug GNSS: FALSE
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.531225580\] \[zed.zed_node\]: \* Debug Positional Tracking: FALSE
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.531412465\] \[zed.zed_node\]: \* Debug sensors: FALSE
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.532335079\] \[zed.zed_node\]: \* Debug Mapping: FALSE
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.532793938\] \[zed.zed_node\]: \* Debug Object Detection: FALSE
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.533060856\] \[zed.zed_node\]: \* Debug Body Tracking: FALSE
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.533458273\] \[zed.zed_node\]: \* Debug Streaming: FALSE
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.533849611\] \[zed.zed_node\]: \* Debug ROI: FALSE
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.534105617\] \[zed.zed_node\]: \* Debug Nitros: FALSE
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.534580924\] \[zed.zed_node\]: \* Debug Advanced: FALSE
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.534716416\] \[zed.zed_node\]: + Debug Mode enabled +
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.534772833\] \[zed.zed_node\]: === TOPIC selection parameters ===
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.534985638\] \[zed.zed_node\]: \* Publish Status: TRUE
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.535321454\] \[zed.zed_node\]: \* Publish Left/Right images: TRUE
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.535648022\] \[zed.zed_node\]: \* Publish Raw images: FALSE
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.535970973\] \[zed.zed_node\]: \* Publish Gray images: FALSE
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.536214595\] \[zed.zed_node\]: \* Publish RGB image: FALSE
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.536399688\] \[zed.zed_node\]: \* Publish Stereo image: FALSE
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.536536843\] \[zed.zed_node\]: \* Publish ROI Mask image: FALSE
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.536690031\] \[zed.zed_node\]: \* Publish Depth Map: TRUE
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.536822706\] \[zed.zed_node\]: \* Publish Depth Info: TRUE
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.536946997\] \[zed.zed_node\]: \* Publish Point Cloud: TRUE
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.537151258\] \[zed.zed_node\]: \* Publish Depth Confidence: FALSE
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.537407488\] \[zed.zed_node\]: \* Publish Disparity: FALSE
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.537611589\] \[zed.zed_node\]: \* Publish IMU: TRUE
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.537738216\] \[zed.zed_node\]: \* Publish IMU Raw: FALSE
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.537856458\] \[zed.zed_node\]: \* Publish LeftCam/IMU Transf.: FALSE
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.537972269\] \[zed.zed_node\]: \* Publish Magnetometer: FALSE
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.538072080\] \[zed.zed_node\]: \* Publish Barometer: FALSE
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.538185458\] \[zed.zed_node\]: \* Publish Temperature: FALSE
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.538270644\] \[zed.zed_node\]: \* Publish Odometry/Pose: TRUE
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.538385239\] \[zed.zed_node\]: \* Publish Pose with Covariance: FALSE
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.538468441\] \[zed.zed_node\]: \* Publish Camera Path: FALSE
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.538548187\] \[zed.zed_node\]: \* Publish Detection Plane: FALSE
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.538672638\] \[zed.zed_node\]: === SVO INPUT parameters ===
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.538878691\] \[zed.zed_node\]: === LOCAL STREAMING parameters ===
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.538998758\] \[zed.zed_node\]: === GENERAL parameters ===
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.539168362\] \[zed.zed_node\]: \* Camera model: zedxm - ZED X Mini
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.539314957\] \[zed.zed_node\]: \* Camera name: zed
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.539532819\] \[zed.zed_node\]: \* Camera SN: 55776696
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.539700887\] \[zed.zed_node\]: \* Camera ID: -1
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.539929660\] \[zed.zed_node\]: \* Camera timeout \[sec\]: 5
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.540116576\] \[zed.zed_node\]: \* Camera reconnection temptatives: 5
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.540258500\] \[zed.zed_node\]: \* Camera framerate: 15
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.540541291\] \[zed.zed_node\]: \* GPU ID: -1
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.540723407\] \[zed.zed_node\]: \* Asynchronous image retrieval: FALSE
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.540951284\] \[zed.zed_node\]: \* Image Validity Check: 1
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.541175066\] \[zed.zed_node\]: \* Camera resolution: HD1080
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.541370526\] \[zed.zed_node\]: \* Publishing resolution: NATIVE
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.541531394\] \[zed.zed_node\]: \* OpenCV custom calibration:
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.541663781\] \[zed.zed_node\]: \* Camera self calibration: TRUE
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.541940332\] \[zed.zed_node\]: \* Camera flip: FALSE
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.542289908\] \[zed.zed_node\]: \* Publish framerate \[Hz\]: 15
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.542364726\] \[zed.zed_node\]: === VIDEO parameters ===
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.542705950\] \[zed.zed_node\]: \* Saturation: 4 \[DYNAMIC\]
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.542887363\] \[zed.zed_node\]: \* Sharpness: 1 \[DYNAMIC\]
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.543085575\] \[zed.zed_node\]: \* Gamma: 2 \[DYNAMIC\]
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.543476305\] \[zed.zed_node\]: \* Auto Exposure/Gain: TRUE \[DYNAMIC\]
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.543851706\] \[zed.zed_node\]: \* Exposure: 92 \[DYNAMIC\]
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.544028030\] \[zed.zed_node\]: \* Gain: 80 \[DYNAMIC\]
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.544127456\] \[zed.zed_node\]: \* Auto White Balance: TRUE \[DYNAMIC\]
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.544233539\] \[zed.zed_node\]: \* White Balance Temperature: 42 \[DYNAMIC\]
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.544324069\] \[zed.zed_node\]: \* ZED X Exposure time: 16666 \[DYNAMIC\]
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.544419751\] \[zed.zed_node\]: \* ZED X Auto Exp. time range min: 28 \[DYNAMIC\]
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.544566571\] \[zed.zed_node\]: \* ZED X Auto Exp. time range max: 16666 \[DYNAMIC\]
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.544746223\] \[zed.zed_node\]: \* ZED X Exposure comp.: 50 \[DYNAMIC\]
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.544908339\] \[zed.zed_node\]: \* ZED X Analog Gain: 8000 \[DYNAMIC\]
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.545086167\] \[zed.zed_node\]: \* ZED X Auto Analog Gain range min: 1000 \[DYNAMIC\]
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.545306428\] \[zed.zed_node\]: \* ZED X Auto Analog Gain range max: 16000 \[DYNAMIC\]
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.545553442\] \[zed.zed_node\]: \* ZED X Digital Gain: 128 \[DYNAMIC\]
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.545783080\] \[zed.zed_node\]: \* ZED X Auto Digital Gain range min: 1 \[DYNAMIC\]
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.545985005\] \[zed.zed_node\]: \* ZED X Auto Digital Gain range max: 256 \[DYNAMIC\]
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.546154929\] \[zed.zed_node\]: \* ZED X Auto Digital Gain range max: 50 \[DYNAMIC\]
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.546203794\] \[zed.zed_node\]: === DEPTH parameters ===
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.546448888\] \[zed.zed_node\]: \* Depth mode: NEURAL LIGHT \[4\]
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.546622524\] \[zed.zed_node\]: \* Min depth \[m\]: 0.3
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.546799008\] \[zed.zed_node\]: \* Max depth \[m\]: 12
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.546944259\] \[zed.zed_node\]: \* Depth Stabilization: 30
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.547098375\] \[zed.zed_node\]: \* OpenNI mode (16bit depth): FALSE
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.547251595\] \[zed.zed_node\]: \* Point cloud rate \[Hz\]: 10
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.547529969\] \[zed.zed_node\]: \* Point cloud resolution: COMPACT
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.547714006\] \[zed.zed_node\]: \* Depth Confidence: 95 \[DYNAMIC\]
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.547862009\] \[zed.zed_node\]: \* Depth Texture Confidence: 100 \[DYNAMIC\]
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.548014045\] \[zed.zed_node\]: \* Remove saturated areas: TRUE \[DYNAMIC\]
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.548055390\] \[zed.zed_node\]: === STREAMING SERVER parameters ===
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.557280282\] \[zed.zed_node\]: \* Streaming Server enabled: FALSE
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.557370652\] \[zed.zed_node\]: \* Stream codec: H264
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.557474399\] \[zed.zed_node\]: \* Stream port: 30000
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.557557793\] \[zed.zed_node\]: \* Stream bitrate: 12500
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.557656451\] \[zed.zed_node\]: \* Stream GOP size: -1
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.557753158\] \[zed.zed_node\]: \* Stream Chunk size: 16084
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.557856680\] \[zed.zed_node\]: \* Adaptive bitrate: FALSE
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.557952106\] \[zed.zed_node\]: \* Target frame rate:0
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.557981995\] \[zed.zed_node\]: === ADVANCED parameters ===
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.558133807\] \[zed.zed_node\]: \* Thread sched. policy: SCHED_BATCH
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.558276210\] \[zed.zed_node\]: === STARTING CAMERA ===
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.570922400\] \[zed.zed_node\]: ZED SDK Version: 5.1.0 - Build 106231_f4e0c540
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165983.574733307\] \[zed.zed_node\]: === CAMERA OPENING ===
zed-ros2 | \[component_container_isolated-2\] \[2025-11-26 15:06:24 UTC\]\[ZED\]\[INFO\] Logging level INFO
zed-ros2 | \[component_container_isolated-2\] \[2025-11-26 15:06:27 UTC\]\[ZED\]\[INFO\] \[Init\] Camera FW version: 2001
zed-ros2 | \[component_container_isolated-2\] \[2025-11-26 15:06:27 UTC\]\[ZED\]\[INFO\] \[Init\] Video mode: HD1080@15
zed-ros2 | \[component_container_isolated-2\] \[2025-11-26 15:06:27 UTC\]\[ZED\]\[INFO\] \[Init\] Serial Number: S/N 55776696
zed-ros2 | \[component_container_isolated-2\] \[2025-11-26 15:06:27 UTC\]\[ZED\]\[INFO\] \[Init\] Depth mode: NEURAL LIGHT
zed-ros2 | \[component_container_isolated-2\] \[2025-11-26 15:06:29 UTC\]\[ZED\]\[WARNING\] \[Init\] Self-calibration skipped. Scene may be occluded or lack texture.
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.215329944\] \[zed.zed_node\]: \* ZED SDK running on GPU #0
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.215466491\] \[zed.zed_node\]: \* Camera Model → ZED X Mini
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.215494908\] \[zed.zed_node\]: \* Serial Number → 55776696
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.215669728\] \[zed.zed_node\]: \* Focal Length → 3.8151 mm
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.215721569\] \[zed.zed_node\]: \* Input → GMSL
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.215751778\] \[zed.zed_node\]: \* Camera FW Version → 2001
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.215771266\] \[zed.zed_node\]: \* Sensors FW Version → 1000
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.215793027\] \[zed.zed_node\]: \* Camera grab size → 1920x1080
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.215811203\] \[zed.zed_node\]: \* Color/Depth publishing size → 1920x1080
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.215829540\] \[zed.zed_node\]: \* Point Cloud publishing size → 448x256
zed-ros2 | \[component_container_isolated-2\] \[DEBUG\] \[1764165989.216570389\] \[zed.zed_node\]: Default value for SATURATION: 4
zed-ros2 | \[component_container_isolated-2\] \[DEBUG\] \[1764165989.216777114\] \[zed.zed_node\]: Default value for SHARPNESS: 1
zed-ros2 | \[component_container_isolated-2\] \[DEBUG\] \[1764165989.216826491\] \[zed.zed_node\]: Default value for GAMMA: 2
zed-ros2 | \[component_container_isolated-2\] \[DEBUG\] \[1764165989.216855324\] \[zed.zed_node\]: Default value for AEC / AGC: 1
zed-ros2 | \[component_container_isolated-2\] \[DEBUG\] \[1764165989.216875453\] \[zed.zed_node\]: Default value for EXPOSURE: 47
zed-ros2 | \[component_container_isolated-2\] \[DEBUG\] \[1764165989.216891293\] \[zed.zed_node\]: Default value for GAIN: 80
zed-ros2 | \[component_container_isolated-2\] \[DEBUG\] \[1764165989.217333480\] \[zed.zed_node\]: Default value for WHITEBALANCE AUTO: 1
zed-ros2 | \[component_container_isolated-2\] \[DEBUG\] \[1764165989.217389257\] \[zed.zed_node\]: Default value for WHITEBALANCE TEMPERATURE: 2800
zed-ros2 | \[component_container_isolated-2\] \[DEBUG\] \[1764165989.217421258\] \[zed.zed_node\]: \[ZEDX\] Default value for EXPOSURE TIME: 31091
zed-ros2 | \[component_container_isolated-2\] \[DEBUG\] \[1764165989.217479051\] \[zed.zed_node\]: \[ZEDX\] Default value for AUTO EXPOSURE TIME RANGE: \[28,66000\]
zed-ros2 | \[component_container_isolated-2\] \[DEBUG\] \[1764165989.218015608\] \[zed.zed_node\]: \[ZEDX\] Default value for EXPOSURE COMPENSATION: 50
zed-ros2 | \[component_container_isolated-2\] \[DEBUG\] \[1764165989.218140891\] \[zed.zed_node\]: \[ZEDX\] Default value for ANALOG GAIN: 13000
zed-ros2 | \[component_container_isolated-2\] \[DEBUG\] \[1764165989.218205276\] \[zed.zed_node\]: \[ZEDX\] Default value for AUTO ANALOG GAIN RANGE: \[1000,16000\]
zed-ros2 | \[component_container_isolated-2\] \[DEBUG\] \[1764165989.218234077\] \[zed.zed_node\]: \[ZEDX\] Default value for DIGITAL GAIN: 1
zed-ros2 | \[component_container_isolated-2\] \[DEBUG\] \[1764165989.218254366\] \[zed.zed_node\]: \[ZEDX\] Default value for AUTO DIGITAL GAIN RANGE: \[1,256\]
zed-ros2 | \[component_container_isolated-2\] \[DEBUG\] \[1764165989.218422658\] \[zed.zed_node\]: \[ZEDX\] Default value for DENOISING: 50
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.218520388\] \[zed.zed_node\]: === PUBLISHED TOPICS ===
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.220451890\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/status/health
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.221770513\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/status/heartbeat
zed-ros2 | \[component_container_isolated-2\] \[DEBUG\] \[1764165989.260780629\] \[zed.zed_node\]: getTopicToAdvertise: /zed/zed_node/left/color/rect/image/compressed
zed-ros2 | \[component_container_isolated-2\] \[DEBUG\] \[1764165989.273029593\] \[zed.zed_node\]: getTopicToAdvertise: /zed/zed_node/left/color/rect/image/compressedDepth
zed-ros2 | \[component_container_isolated-2\] \[DEBUG\] \[1764165989.281775178\] \[zed.zed_node\]: getTopicToAdvertise: /zed/zed_node/left/color/rect/image
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.283064489\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/left/color/rect/image
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.286372472\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/left/color/rect/image/compressedDepth \[image_transport\]
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.286432633\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/left/color/rect/image/compressed \[image_transport\]
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.286451994\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/left/color/rect/image/raw \[image_transport\]
zed-ros2 | \[component_container_isolated-2\] \[DEBUG\] \[1764165989.287007783\] \[zed.zed_node\]: getTopicToAdvertise: /zed/zed_node/right/color/rect/image/compressed
zed-ros2 | \[component_container_isolated-2\] \[DEBUG\] \[1764165989.289486242\] \[zed.zed_node\]: getTopicToAdvertise: /zed/zed_node/right/color/rect/image/compressedDepth
zed-ros2 | \[component_container_isolated-2\] \[DEBUG\] \[1764165989.290602365\] \[zed.zed_node\]: getTopicToAdvertise: /zed/zed_node/right/color/rect/image
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.291578196\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/right/color/rect/image
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.291700055\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/right/color/rect/image/compressedDepth \[image_transport\]
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.291727960\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/right/color/rect/image/compressed \[image_transport\]
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.291848603\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/right/color/rect/image/raw \[image_transport\]
zed-ros2 | \[component_container_isolated-2\] \[DEBUG\] \[1764165989.292194211\] \[zed.zed_node\]: getTopicToAdvertise: /zed/zed_node/depth/depth_registered/compressed
zed-ros2 | \[component_container_isolated-2\] \[DEBUG\] \[1764165989.295083400\] \[zed.zed_node\]: getTopicToAdvertise: /zed/zed_node/depth/depth_registered/compressedDepth
zed-ros2 | \[component_container_isolated-2\] \[DEBUG\] \[1764165989.296161794\] \[zed.zed_node\]: getTopicToAdvertise: /zed/zed_node/depth/depth_registered
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.297148889\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/depth/depth_registered
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.297381951\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/depth/depth_registered/compressedDepth \[image_transport\]
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.297432192\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/depth/depth_registered/compressed \[image_transport\]
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.297507714\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/depth/depth_registered/raw \[image_transport\]
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.298832386\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/left/color/rect/camera_info
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.299728183\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/left/color/rect/image/camera_info
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.300854386\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/right/color/rect/camera_info
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.301993965\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/right/color/rect/image/camera_info
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.302939140\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/depth/camera_info
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.304020893\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/depth/depth_registered/camera_info
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.306065838\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/depth/depth_info
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.308099551\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/point_cloud/cloud_registered
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.310112559\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/pose
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.311978523\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/pose/status
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.314920930\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/odom
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.317041524\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/imu/data
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.317156663\] \[zed.zed_node\]: Camera-IMU Translation:
zed-ros2 | \[component_container_isolated-2\] 0 -0.034502 -0.004356
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.317227865\] \[zed.zed_node\]: ===Subscribers ===
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.320393412\] \[zed.zed_node\]: \* Plane detection: ‘/clicked_point’
zed-ros2 | \[component_container_isolated-2\] \[DEBUG\] \[1764165989.447520128\] \[zed.zed_node\]: New setting for AEC / AGC: 1
zed-ros2 | \[component_container_isolated-2\] \[DEBUG\] \[1764165989.447917993\] \[zed.zed_node\]: New setting for WHITEBALANCE AUTO: 1
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.449934106\] \[zed.zed_node\]: === Starting Positional Tracking ===
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.449999259\] \[zed.zed_node\]: \* Waiting for valid static transformations…
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.450212256\] \[zed.zed_node\]: Static transform ref. CMOS Sensor to Base \[zed_left_camera_frame → zed_camera_link\]
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.450252673\] \[zed.zed_node\]: \* Translation: {0.010,-0.025,-0.016}
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.450274274\] \[zed.zed_node\]: \* Rotation: {0.000,-0.000,0.000}
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.450315267\] \[zed.zed_node\]: Static transform ref. CMOS Sensor to Camera Center \[zed_left_camera_frame → zed_camera_center\]
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.450334371\] \[zed.zed_node\]: \* Translation: {0.010,-0.025,0.000}
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.450346371\] \[zed.zed_node\]: \* Rotation: {0.000,-0.000,0.000}
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.450423365\] \[zed.zed_node\]: Static transform Camera Center to Base \[zed_camera_center → zed_camera_link\]
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.450457638\] \[zed.zed_node\]: \* Translation: {0.000,0.000,-0.016}
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.450472614\] \[zed.zed_node\]: \* Rotation: {0.000,-0.000,0.000}
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.451592033\] \[zed.zed_node\]: Initial ZED left camera pose (ZED pos. tracking):
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.451636322\] \[zed.zed_node\]: \* T: \[-0.01,0.025,0.016\]
zed-ros2 | \[component_container_isolated-2\] \[INFO\] \[1764165989.451782150\] \[zed.zed_node\]: \* Q: \[0,0,0,1\]
sergii
November 26, 2025, 2:28pm
6
ping me, I’ll confirm sharing
Myzhar
November 27, 2025, 10:09am
7
The debug log shows that the applied camera control values are the same, so you should obtain the same image quality.
Please note that automatic settings behave differently in different conditions. If you want a stable setup I recommend you use fixed values for exposure and gain.