I have integrated zedx camera into robot using the documentation provided in this link ZED integration on a Robot - Stereolabs
When i try to import the urdf into isaac sim and try to stream the data using that camera, i am only getting a top plane view from the origin of the enviroment the camera is in,. The camera view stays there even if the robot moves.
I am adding the zed_camera_link into the zed camera streamer in the camera prim while building action graph.
Hi @Anirudhgudi,
Once you’ve imported the URDF into Isaac Sim, have you included the ZED Camera extension using this guide in our documentation? Setting up ZED Camera in Isaac Sim - Stereolabs
Are you able to stream the ZED camera data to our other tools such as ZED_Explorer or ZED_Depth_Viewer?
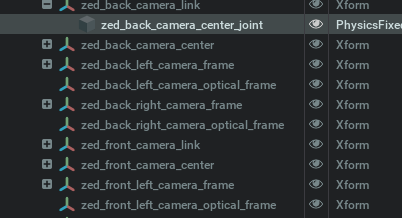
Hi sorry for the delay… yes i can stream the data… the image is the same as i attached in my previous post. Once i do the integration of robot in the urdf as per documentation, the cameras get added with individual prims and its visible this way in isaac sim ( image ). which prim should i add in the zed streamer node in omnigraph?
Hi @Anirudhgudi,
Currently, we do not support importing the zed camera directly from an urdf file, the ZED X model still requires to be imported as described here: Setting up ZED Camera in Isaac Sim - Stereolabs
I would recommend placing the ZED_X USD model under the zed_back_camera_link prim, and then following the tutorial to add the streamer node.
Got it. Thank you for the support!
Hi @mattrouss ,
I configured both of the zed cameras in my isaac sim using the zed camera extension using two different action graphs. I have specified two different serial numbers in the zed camera streamer but i am not able to stream data from even one camera. As soon as hit the play sim button, i get this error “2025-01-20 09:43:55 [Error] [sl.sensor.camera.ogn.nodes.SlCameraStreamer] Failed to initialize the ZED SDK streamer with serial number 40976320.”
Any suggestions on how to configure two cameras in isaac sim?
Hi @mattrouss ,
I was able to rectify the error by keeping the serial number same and different sim ports in the zed cam streamer action graph.
Thank you!
Hi @Anirudhgudi
I have a similar issue… We have in total four ZED X cameras. When creating one ActionGraph for only one camera, it works and I can see the camera stream on port 30000.
When creating a separate ActionGraph for each of the other cameras, with a different serial number (one of the proposed number) and a different streaming port (e.g. 30002, 30004, 30006), I can’t see the stream of the others in the ZED_Depth_Viewer.
I’m using Isaac Sim 4.5 and ZED SDK 4.2.5.
How did you manage to see the different cameras in the ZED viewer?
Many thanks for your help.
[2025-11-18 07:24:29 UTC][ZED][INFO] Logging level INFO
[2025-11-18 07:24:37 UTC][ZED][INFO] Logging level INFO
[Streaming] Warning : receiving port 30000 is not available (already used)… switching to port 30002. Retrying…
[Streaming] Metadata timeout. the size is equal to 196 instead of 21960. Skipping.
[Streaming] Metadata timeout. the size is equal to 196 instead of 21960. Skipping.
[Streaming] No backward compatibility required.
[2025-11-18 07:24:38 UTC][ZED][INFO] [Init] Depth mode: ULTRA
[2025-11-18 07:24:38 UTC][ZED][INFO] [Init] Serial Number: S/N 40976320
[2025-11-18 07:24:38 UTC][ZED][WARNING] Simulated ZED camera used.
[2025-11-18 07:24:38 UTC][ZED][WARNING] [Init] Invalid calibration file. On Linux, call export LC_ALL=“C” and restart your application.
[2025-11-18 07:24:38 UTC][ZED][WARNING] Self Calibration Disabled.
[Streaming] Metadata timeout. the size is equal to -1 instead of 21960. Skipping.
[2025-11-18 07:24:50 UTC][ZED][INFO] Logging level INFO
[Streaming] Warning: Failed to retrieve camera settings from sender
[Streaming] Error: Stream Opening returned TIMEOUT (350)
[Streaming] Metadata timeout. the size is equal to -1 instead of 21960. Skipping.
[2025-11-18 07:25:01 UTC][ZED][WARNING] FAILURE in sl::ERROR_CODE sl: :open(sl::InitParameters)
:open(sl::InitParameters)