Hello Dear Community.
I am using zed mini camera for the first time so I do not know what’s happening.
I want to obtain visual inertia odometry data. I was using before the realsense T265 but it’s broke now so I changed to zed mini.
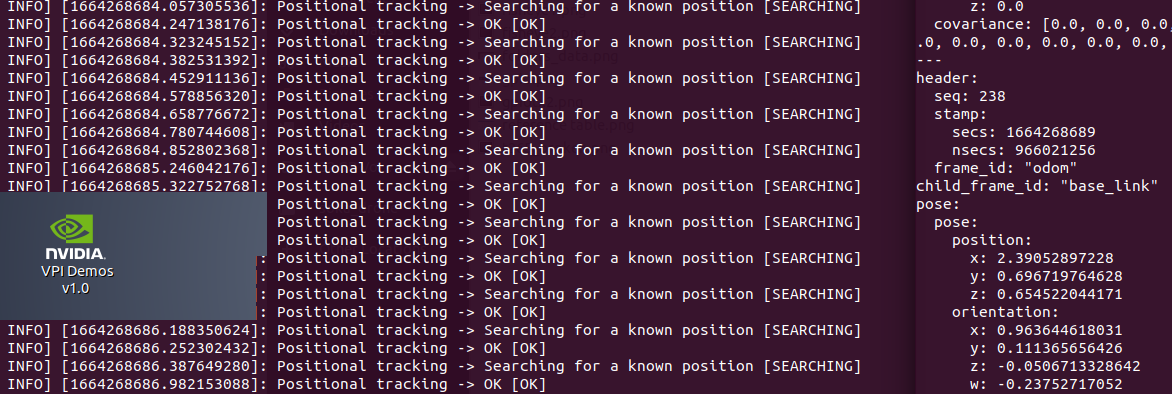
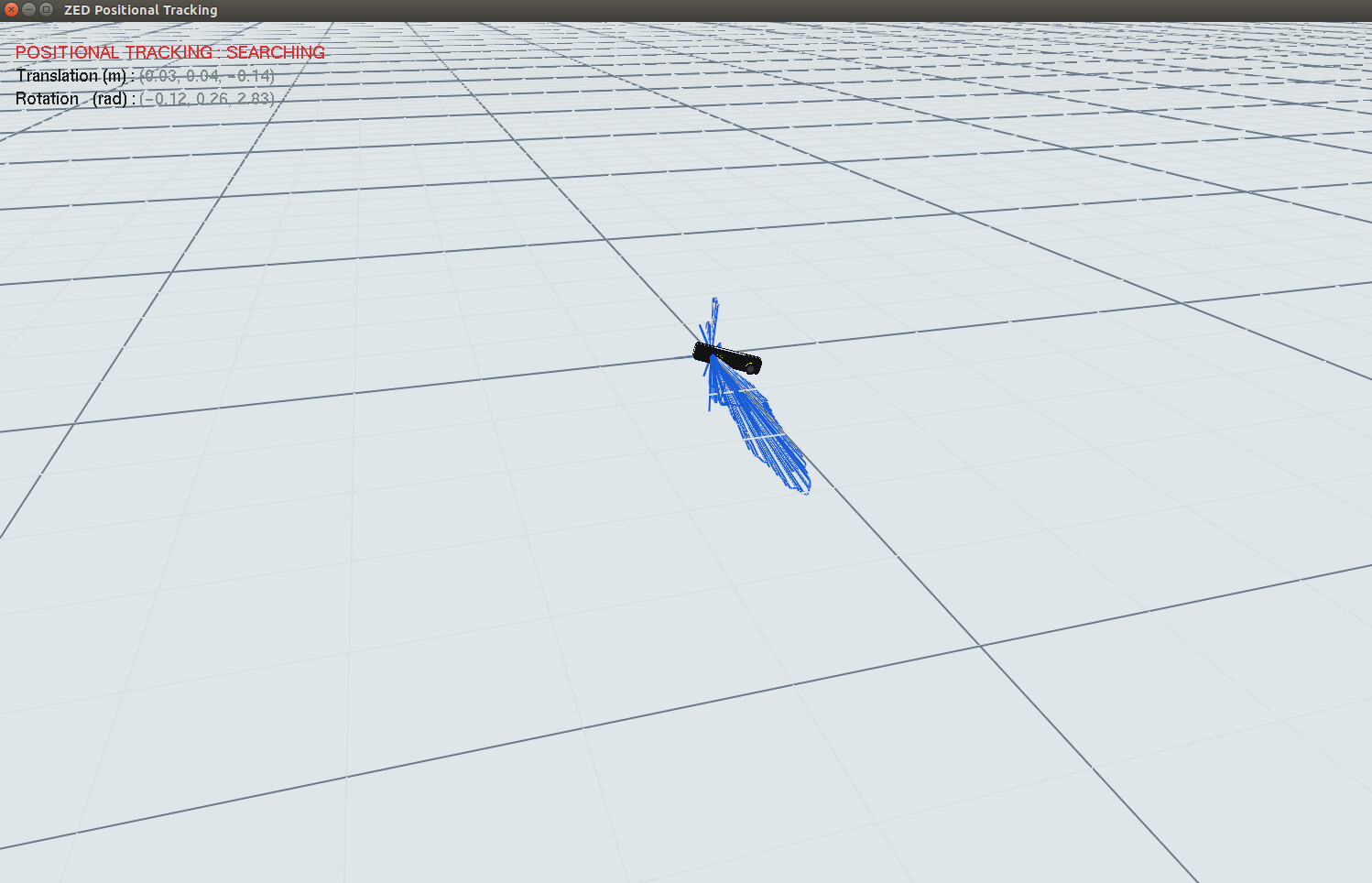
After installing the latest SDK and install the ROS package, when I run the lunch file zed_wrapper zedm.launch but I get this message infinite times Positional tracking -> Searching for a known position [SEARCHING]
Then if I echo this topic i can see the position and orientation but the position is giving me wrong values.
Hi dear @Myzhar
Thank you so much for your answer. Sorry for posting this issue into github.
I have tried the positional_tracking.py and is showing the same error [Searching] and [OK] repetitively and it is not moving accordingly with the movement of the zed camera in real world.
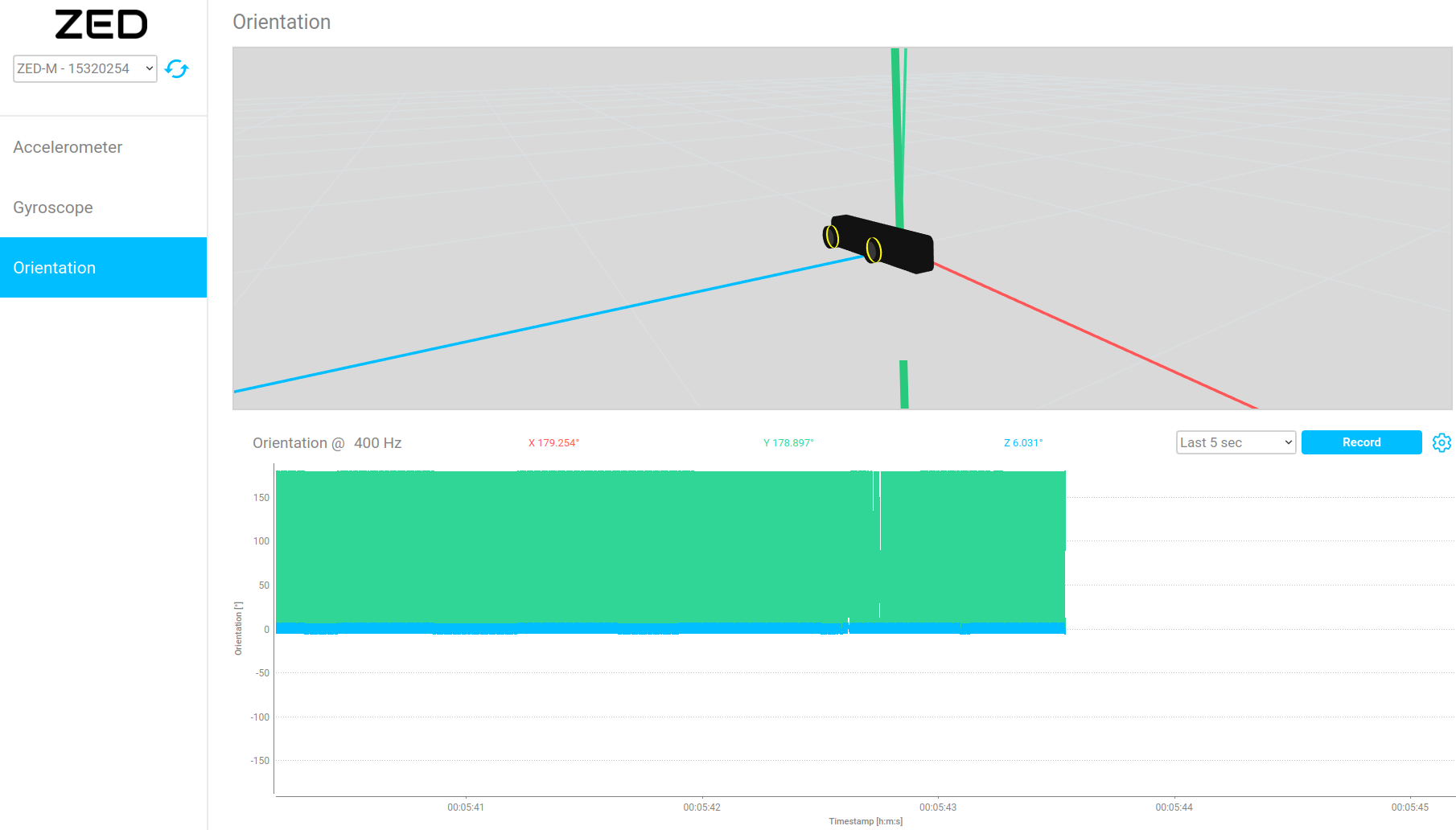
This seems indeed a not correct behavior of the IMU.
Can you try to perform a re-calibration of the IMU by using the command ZED_Calibration --calib_imu?
Let me know if this solves the issue, otherwise you must write to support@stereolabs.com to report the issue.