Hello all,
I have done various tests of the VIO/GNSS Fusion algorithm provided by the ZED ROS2 Wrapper and always the fused results have been way worse than the pure gnss points (which are some times not even RTK). Im using a zed f9p gps receiver (5Hz sampling rate) and the ZED X camera. Receiver Offset from zed is set correctly(although they are almost centered and the height offset is less than 5cm).
The path followed has lots of changes in height, and sudden ones, if that helps and the test was done on a cloudy day (so it wasn’t night that could confuse the camera more).
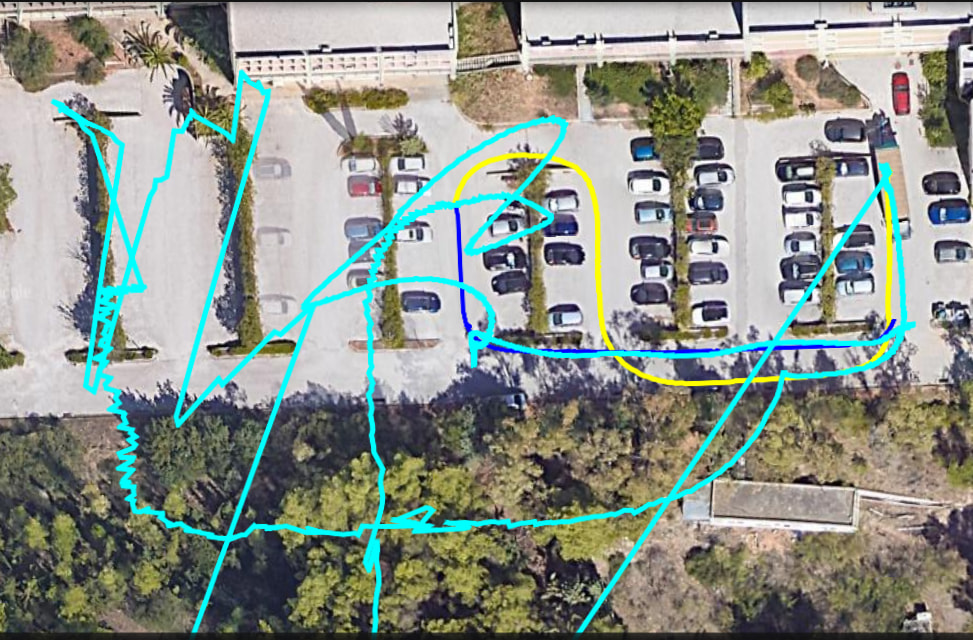
This was the path followed. The yellow line is RTK FIX while the dark blue is 3D DGPS FIX. The run started with RTK and ended in DGPS. The cyan line when it goes off it goes to the coordinates system start (0,0).
Im also attaching the common_stereo.yaml file.
What could be going wrong? Maybe it didn’t manage to end the calibration or something got confused there? The run is about 150m long. Also it can be seen that at the start of the run the fused position is right and that after that its lost completely but its saved just before the run ends.
Any pointers would really help!!!
common_stereo.yaml (21.7 KB)