Hello, I am new to the world of computer vision and am experimenting with your ‘Robotics Perception Kit - Dual’. I’m ‘playing’ with the detection provided by the ros2_ZED_wrapper.
When I launch the ROS node of the ZED X camera with the command:
ros2 launch zed_wrapper zed_camera.launch.py camera_model:=zedx serial_number:=XXXXXXXX node_name:=zed_camera_2 namespace:=ZEDX
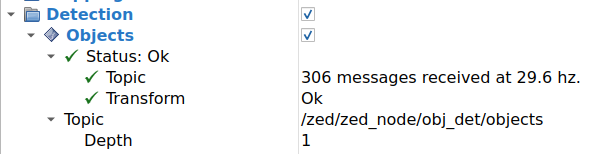
No errors or warnings occur, and I can subscribe to the object detection topic:
ros2 topic echo /zed/zed_camera_2/obj_det/objects | tee -a ~/Documents/output.txt
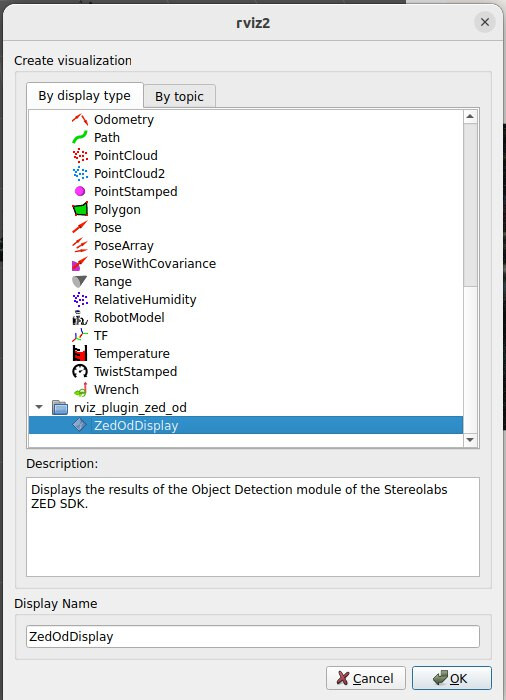
However, the problem arises when I try to visualize object detection in the RViz2 app. I have previously installed the plugin as explained here:
But when I launch RViz2:
ros2 launch zed_display_rviz2 display_zed_cam.launch.py camera_model:=zedx
Everything displayed in the console seems correct except for this error message related to ‘AerialMap’:
[rviz2-1] [ERROR] [1727096225.964193503] [rviz2]: PluginlibFactory: The plugin for class ‘rviz_satellite/AerialMap’ failed to load. Error: According to the loaded plugin descriptions the class rviz_satellite/AerialMap with base class type rviz_common::Display does not exist. Declared types are grid_map_rviz_plugin/GridMap rviz_default_plugins/AccelStamped rviz_default_plugins/Axes rviz_default_plugins/Camera rviz_default_plugins/DepthCloud rviz_default_plugins/Effort rviz_default_plugins/FluidPressure rviz_default_plugins/Grid rviz_default_plugins/GridCells rviz_default_plugins/Illuminance rviz_default_plugins/Image rviz_default_plugins/InteractiveMarkers rviz_default_plugins/LaserScan rviz_default_plugins/Map rviz_default_plugins/Marker rviz_default_plugins/MarkerArray rviz_default_plugins/Odometry rviz_default_plugins/Path rviz_default_plugins/PointCloud rviz_default_plugins/PointCloud2 rviz_default_plugins/PointStamped rviz_default_plugins/Polygon rviz_default_plugins/Pose rviz_default_plugins/PoseArray rviz_default_plugins/PoseWithCovariance rviz_default_plugins/Range rviz_default_plugins/RelativeHumidity rviz_default_plugins/RobotModel rviz_default_plugins/TF rviz_default_plugins/Temperature rviz_default_plugins/TwistStamped rviz_default_plugins/Wrench rviz_plugin_zed_od/ZedOdDisplay
*
*
’
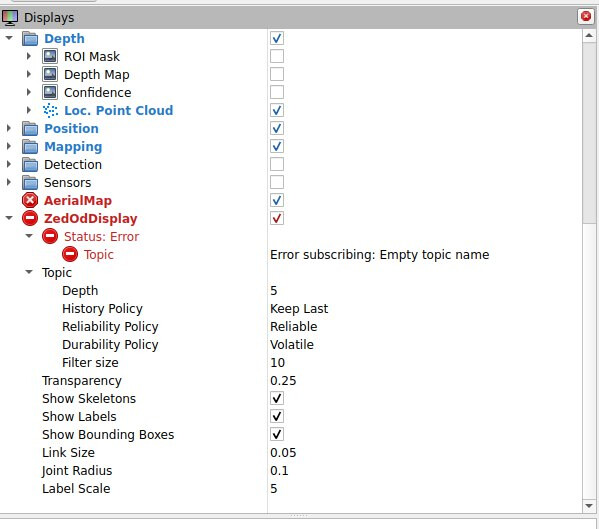
However, when I add the ‘ZedOdDisplay’, it gives an error because the topic is empty, and I cannot manually enter the topic address.
How can I solve this?
Thank you