I am streaming the images from ZED2 camera using a ROS2 humble topic on Jetson Orin NX JP 6.0
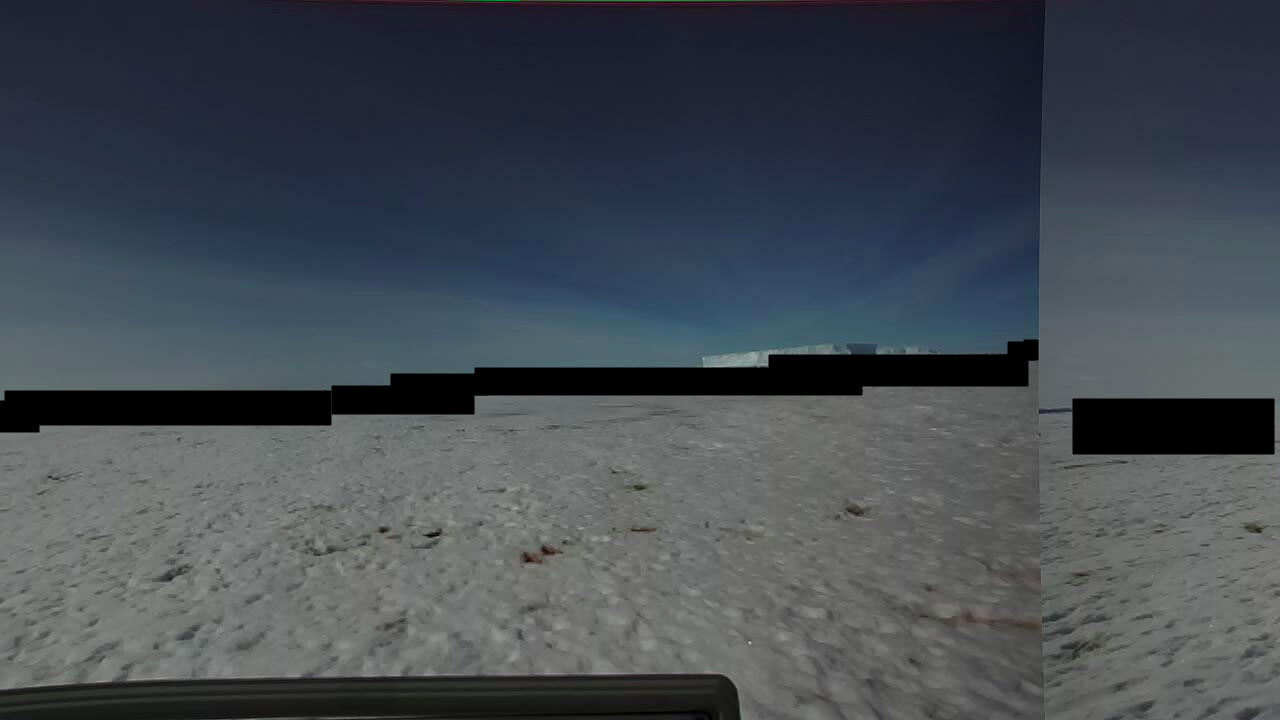
Once in a while, I get images like this from the left camera image. It seems to me that the one of the previous/ current/ next frame gets mixed up in the stream. This causes issues in object tracking.
Hi @you_know_who
this normally happens when the host device is overloaded and the frames are not quickly retrieved from the USB3 buffer.
You can use sl::InitParameter:: enable_image_validity_check to enable image check and reject corrupted images.
Please also see getHealthStatus
@Myzhar How do I do it if I am using the ROS2 wrapper and not the SDK?
We will add this feature to the ROS 2 Wrapper soon.
If you are in a hurry, you can submit a PR.
Not in a hurry right now. I will use the camera again in several months. I can submit a PR but I don’t know how to solve it. Do you mean to create an issue on github to track it?
No, a PR is a Pull Request. Normally it means that you fork our repository, you implement the new feature, and finally you submit a PR to integrate it in our code.
No need to create a new issue, I already logged it and it’s in our development queue.
I think I will wait as I don’t know what changes to make in your code to implement this new feature.