Has anyone else had trouble activating the IMU on the ZED camera when using the zed_ros2_wrapper? I’ve been trying to get the IMU data to work, but I am encountering an issue where the IMU topic is not being published.
Specifically, when I run:
ros2 topic echo /zed/zed_node/imu/data
I get an empty data stream, even though everything else—like visual odometry, mapping, and point cloud generation—works fine. However, when I check the IMU settings with:
ros2 param get /zed/zed_node sensors.publish_imu_tf
It returns “True,” so I believe that the relevant IMU parameters are correctly set.
Has anyone encountered a similar issue or have any suggestions on what might be causing this? Any insights would be greatly appreciated.
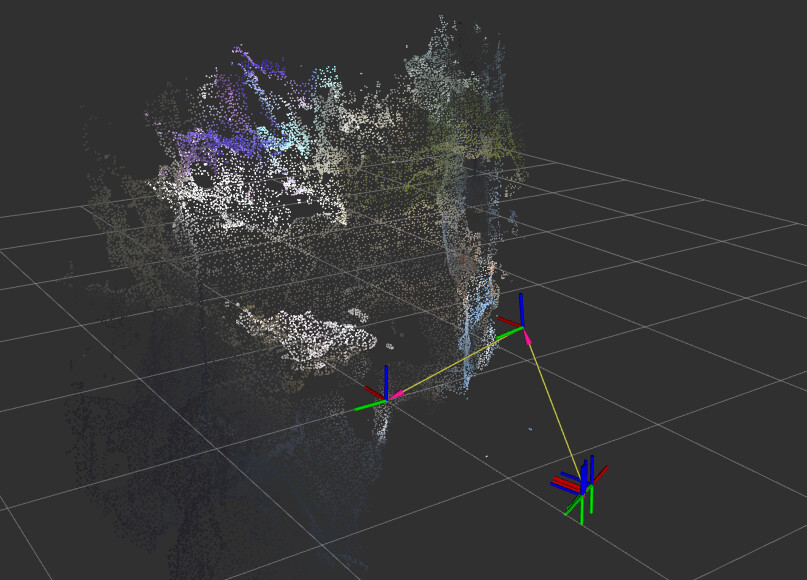
Hi @Myzhar! Yep, ZED_Sensor_Viewer verifies that the accelerometer and gyroscope are available. However, when I try to visualize the camera’s position using Rviz by looking at the camera’s transforms:
They start flying around even though I barely move the camera by a fraction of an inch to produce the above image. My best guess is that this has something to do with the camera being unable to localize since the IMU topic is not being published, but I am not sure.