I am using ZED 2i with Jetson orin nano devkit running ros2 humble and ubuntu 22.04. I collected static images with VGA resolution at 15 Hz.
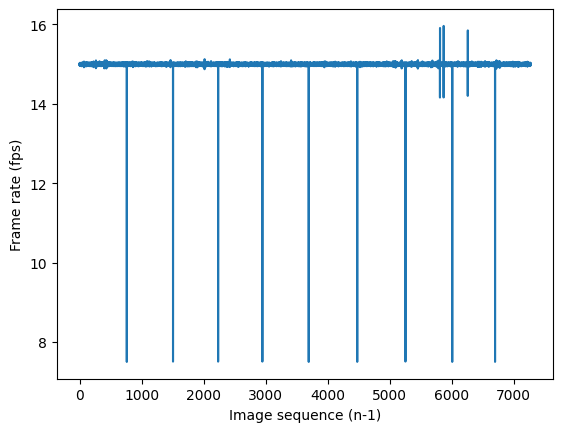
I noticed that there is a constant frame drop that happens around ~46 to 50 s. Instead of 67 ms as interval for consecutive images, I see 133 ms. Is this an expected behavior? Is there a way to remove this frame drops or latency?
I attached the following plot. Thanks.
Hi @ellarizza
Please provide more information regarding your setup.
How are you measuring the framerate?
Are you using the Jetson in MAXN power mode with jetson_clocks running?
Have you applied the recommended system settings?
Hi @Myzhar
To measure the frame rate, I get the absolute difference of timestamps from two consecutive images and get its reciprocal. For example: time_diff = 0.067 s; frame_rate = 1/0.067 = 14.92 ~ 15.
I am using Jetson in MAXN power mode, but I have not used jetson_clocks. But I have setup Chrony and use a 1 PPS source (ublox m8t) via GPIO.
I have not applied the recommended system settings.
I would appreciate your suggested next steps to correct my settings/setup.
I use ros2 bag record to retrieve the left and right image and imu topics in Jetson Orin Nano Dev Kit. Aside from time synchronization using chrony and 1 pps, there is no other related processing done.