Dear Team,
I would like to express my sincere appreciation for your exceptional product! Currently, I am delving into the functionality of the IMU and coordinate system within the ZED2i. I have conducted various experiments and would like to share the details with you:
Settings:
- The ZED2i camera was positioned vertically.
- The default coordinate system was utilized, following a right-handed convention with the y-axis pointing downwards.
- Initially, I assumed that the XYZ directions aligned with the image attached.

To avoid confusion stemming from the coordinate system, I have opted to describe camera movements using alternative terms rather than referring to the traditional X, Y, and Z axes.
Experiments:
- Tilting movements were performed in the forward/backward direction.
- The camera was moved forward/backward, with “forward” denoting the direction aligned with the camera lens.
- Horizontal movements were executed, involving displacements parallel to the ground, either closer or farther away from a desk.
Results
I have obtained results in the form of SVO file and python code. These findings encompass translations and orientations.
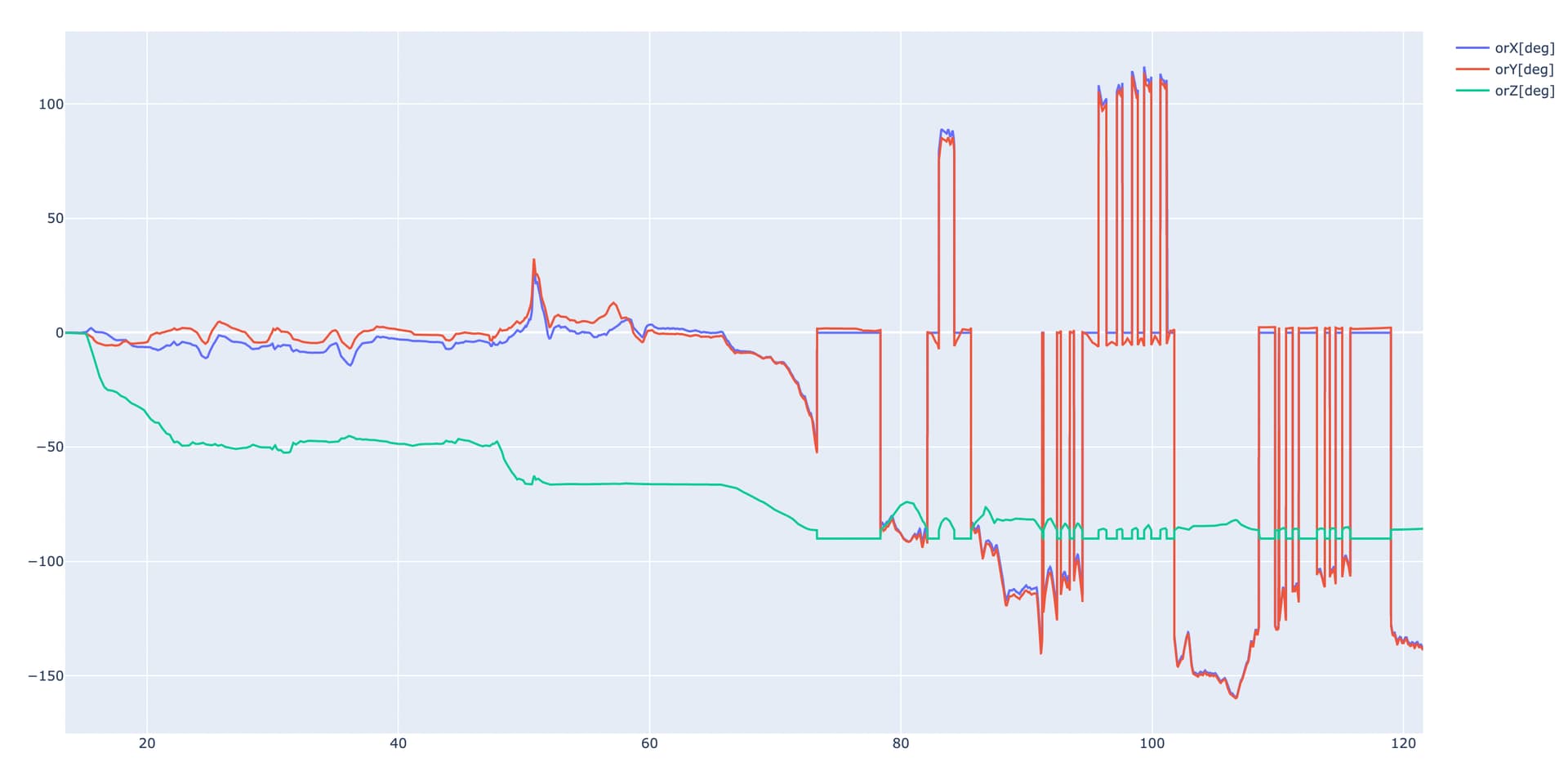
Orientation : Upon analyzing the orientation chart, I noticed that the roll is -90 degrees, which is expected due to the camera’s rotation. When tilting the camera, I initially anticipated only a change in the yaw value. However, I observed that the pitch and yaw exhibited similar patterns initially.
Translation : Examining the translation chart, I made an intriguing observation: despite attempting to alter the camera’s movement away from the desk, the X value consistently decreased. Furthermore, as I did not perform any upward or downward motion, the chart does not reflect changes in the Y translation value. However, I presume that vertical movements might impact the Y translation value.
Problems
I am currently facing a significant challenge in comprehending the coordinate system. The results I have obtained thus far highlight a clear discrepancy between my initial assumptions regarding the X and Y axes and the actual behavior demonstrated by the camera. Specifically, I am puzzled by the simultaneous movement of pitch and yaw when the XYZ coordinates do not align with my initial understanding. As a result, I am finding it difficult to grasp the underlying rationale behind interpreting the XYZ coordinates in this specific manner.
If you could offer any guidance regarding the coordinate system or any other relevant aspects, I would greatly appreciate it.
Thank you sincerely!
YJ