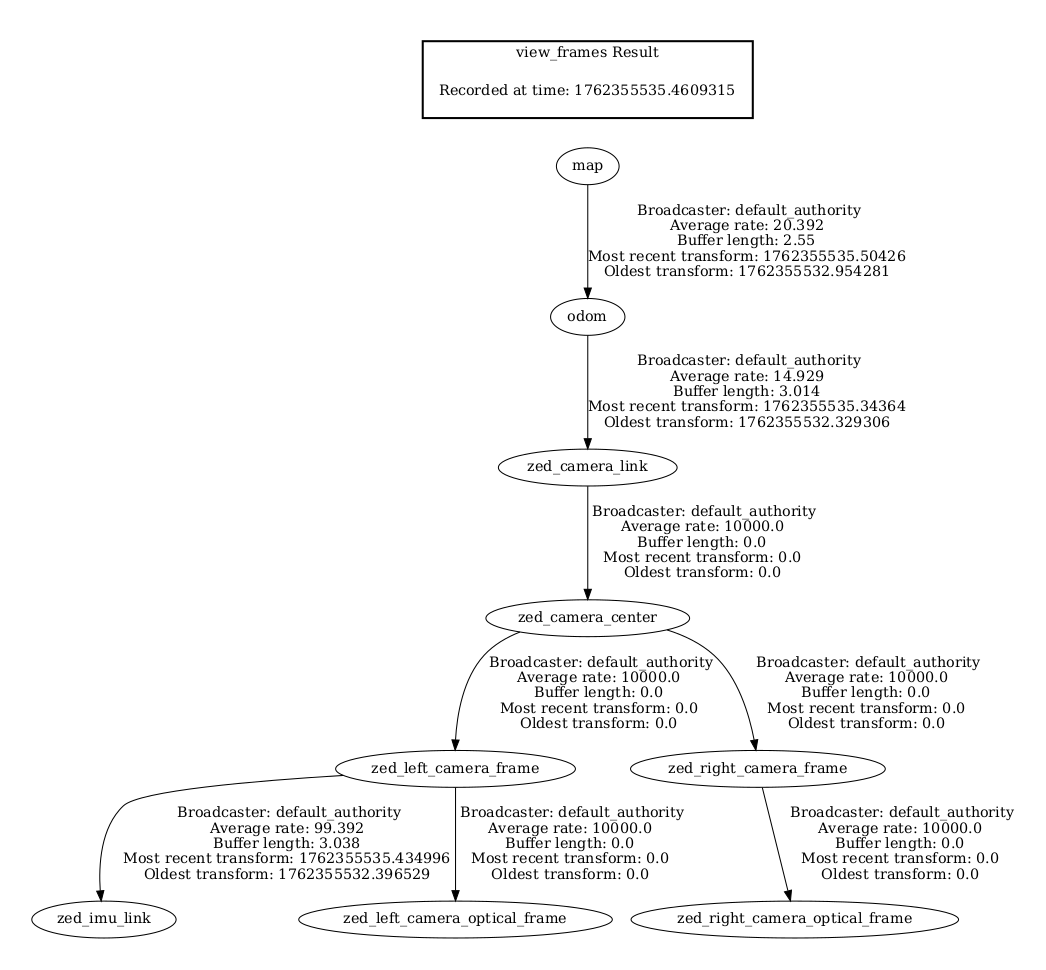
I made a change at the system, so right now I need a base_link that is static transformed from zed_camera_link. The problem is the base_link should between zed_camera_link and odometry, while keeping the zed publish_tf. The problem is this parameter makes odom → zed_camera_link transformation directly so it does not seem possible to add a middle frame between them. I added our rtab + zed launch code. i need the structure of map→odom→base_link→camera_link
from launch import LaunchDescription
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
from launch.substitutions import PathJoinSubstitution
from launch_ros.substitutions import FindPackageShare
from launch.actions import GroupAction
from launch_ros.actions import PushRosNamespace, SetRemap
from launch_ros.actions import Node
# TF chain: map->odom->zed_camera_link (REP 105)
# map->odom: provided by global EKF (GPS-fused)
# odom->zed_camera_link: provided by local EKF
# rtabmap: costmap/grid generation only (publish_tf disabled)
def generate_launch_description() -> LaunchDescription:
rviz_cfg = PathJoinSubstitution(
[
FindPackageShare("juno_bringup"),
"launch",
"rviz_config",
"zed_rtabmap_rgbd.rviz",
]
)
static_tf_node = Node(
package="tf2_ros",
executable="static_transform_publisher",
arguments=[
"--x", "1.1", "--y", "0", "--z", "1",
"--yaw", "0", "--pitch", "0", "--roll", "0",
"--frame-id", "base_link",
"--child-frame-id", "zed_camera_link",
],
)
zed_camera_launch = IncludeLaunchDescription(
PythonLaunchDescriptionSource(
PathJoinSubstitution(
[
FindPackageShare("zed_wrapper"),
"launch",
"zed_camera.launch.py",
]
)
),
launch_arguments={
"camera_model": "zed2i",
"publish_map_tf": "false",
"publish_imu_tf": "true",
"publish_tf": "true",
}.items(),
)
rtabmap_launch = GroupAction([
SetRemap("goal", "/rtabmap/goal_internal"),
IncludeLaunchDescription(
PythonLaunchDescriptionSource(
PathJoinSubstitution(
[
FindPackageShare("rtabmap_launch"),
"launch",
"rtabmap.launch.py",
]
)
),
launch_arguments={
# Run rtabmap_slam in "rtabmap" namespace so mapping topics
# appear under /rtabmap (e.g., /rtabmap/map).
"namespace": "rtabmap",
"rviz_cfg": rviz_cfg,
"args": "--delete_db_on_start --Rtabmap/DetectionRate 1.00",
"frame_id": "zed_camera_link",
"odom_topic": "/zed/zed_node/odom",
"rgb_topic": "/zed/zed_node/rgb/color/rect/image",
"visual_odometry": "false",
"publish_tf": "true",
"depth_topic": "/zed/zed_node/depth/depth_registered",
"camera_info_topic": "/zed/zed_node/rgb/color/rect/image/camera_info",
"wait_imu_to_init": "true",
"imu_topic": "/zed/zed_node/imu/data",
"rviz": "true",
"rtabmap_viz": "false",
"approx_sync": "false",
"rgbd_sync": "true",
"approx_rgbd_sync": "false",
"topic_queue_size": "2",
}.items(),
),
])
return LaunchDescription(
[
zed_camera_launch,
rtabmap_launch,
static_tf_node,
]
)