I need to reset positional tracking but it takes very long time from time to time (5 minutes or longer). Why is this happening and how to make it faster?
Hi @JereK
can you provide more information about the process that you are doing and how we could replicate it?
I am running ROS2 foxy on ubuntu 20.04. I just launch zed2 node and sometimes when I try to reset tracking or odometry using ros2 service call /zed2/zed_node/reset_pos_tracking std_srvs/srv/Trigger or ros2 service call /zed2/zed_node/reset_odometry std_srvs/srv/Trigger it takes very long time to complete.
Can you be more precise? What is taking time? Are you getting any strange log?
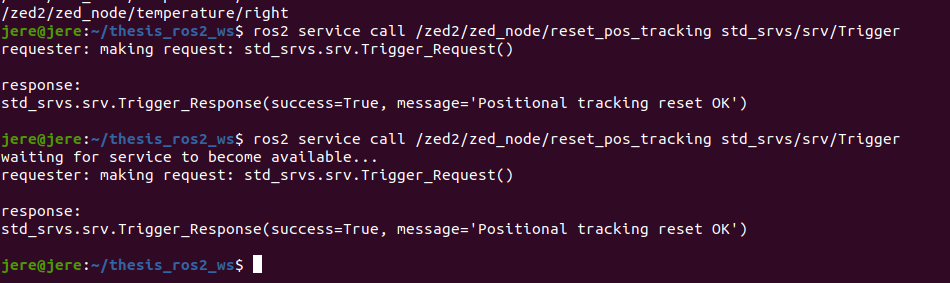
So here are the figures. First is the terminal where I call service. As you can see from the figure I have called the service two times. In the first time, it took about 20 s to complete a service request. However, in the second time when I try to call the service, it took about 2-3 minutes to complete.
The second figure shows the terminal where I launch my zed2.
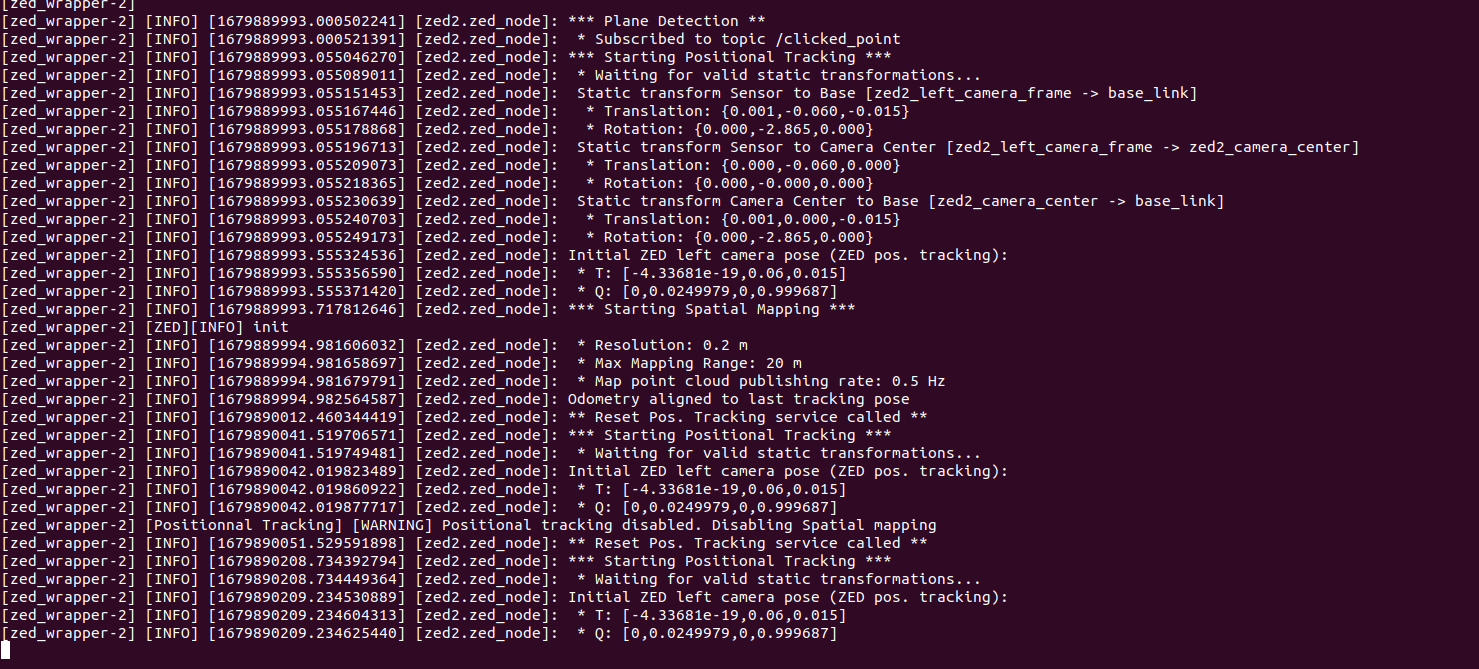
As you can see from the figure I have made a call twice, however in the second time I also get a warning, after I called the reset service. ([zed_wrapper-2] [Positionnal Tracking] [WARNING] Positional tracking disabled. Disabling Spatial mapping). Eventually, the service call succeeded but I don’t want to wait many minutes to do such a simple task.
Why is this happening? There were only a couple of minutes between service calls.
@Myzhar Any updates here?
Not, yet. Trying to replicate the issue without success.
We are publishing a new version of the wrapper for the new ZED SDK v4… it will be ready in the next few hours.