Hi @daGoedie,
The issue you noticed and now fixed would this also have an impact on overall tracking performance? That is tracking jumping between different tracked skeletons.
If you’re talking about the skeleton of one person stuttering between seemingly the skeletons from two cameras offset by 10-20cm, it should improve this because there will be less discrepancy between the skeletons of 1 same subject from several cameras.
Or are you talking about “ID-jumping”, like when having 2 persons really close together the Fusion can mix them up in some cases? This is more caused by occlusion and should not be too common.
I also wanted to ask about the camera orientation setup. We need a long tracking setup 20x5 meters. currently we have them set up in this staggered setup. (As you can see in the Videos I sent.) Would you have additional advice to give us, other cameras poses to use, blacking out the windows, using additional flood lights, or switching to the distributed compute approach (We did order one of the ZED Orin boxes and are deploying the other cameras with the Nvidia Jetsons).
The range of the body tracking of each camera, for optimal results, is about 8m. So for a 5x20m area, you will most probably need at least 2 more cameras.
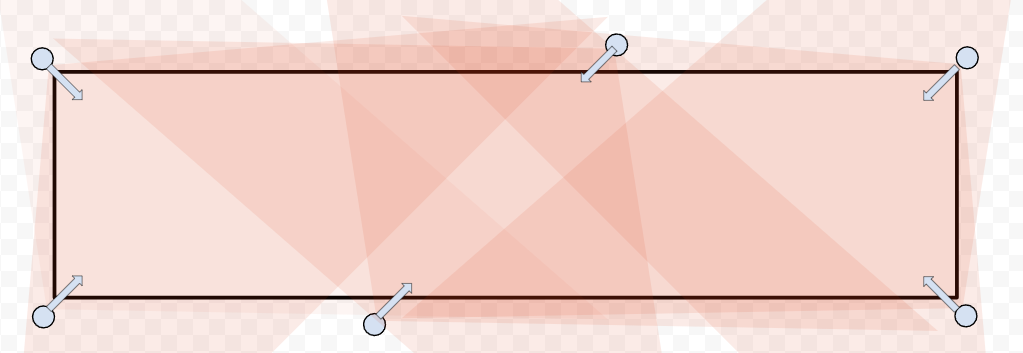
I would do a setup like this, but there could be other solutions, for example, if you’re able to have the cameras not directly on the edges of the area.
We’re working on a tool that will help design a setup with specific cameras, we’ll get it out there as soon as possible. Like, really soon, because we understand that designing these spaces is painful at the moment.
Blacking out the windows or having more controlled lighting would help if the depth is bad on the cameras seeing the windows.
Using the distributed workflow will probably be your only way of adding more cameras so I indeed advise looking into it.
Can I ask how many people should be tracked in this area at once? Depending on this, you may want to add more cameras to reduce the occlusions, or the opposite, have less cameras if one person only is to be tracked (not reduce much, because your area is huge, but still).
I don’t have a release time to give more precise than “in the coming days”, sorry!