Hi @Myzhar,
I’m trying to use GNSS data to fuse them with my four ZED X cameras.
I run the GPS node as well as the ZED_multi node with the following command.
ros2 launch zed_multi_camera zed_multi_camera.launch.py cam_names:='[zed_front_left,zed_front_right, zed_rear_left,zed_rear_right]' cam_models:='[zedx,zedx,zedx,zedx]' cam_ids:='[0,1,2,3]' enable_gnss:='true'
I get the following output and it is not ending…
[component_container_isolated-1] [INFO] [1751291358.067493098] [zed_multi.zed_rear_right]: GNSS fusion status: CALIBRATION_IN_PROGRESS
[component_container_isolated-1] [INFO] [1751291358.067573666] [zed_multi.zed_rear_right]: GNSS reference localization initialized
[component_container_isolated-1] [INFO] [1751291358.067595488] [zed_multi.zed_rear_right]: Static transform MAP to UTM [map -> utm]
[component_container_isolated-1] [INFO] [1751291358.067609470] [zed_multi.zed_rear_right]: * Translation: {542910.302,5229445.245,-1.389}
[component_container_isolated-1] [INFO] [1751291358.067626013] [zed_multi.zed_rear_right]: * Rotation: {0.000,0.000,-0.145}
[component_container_isolated-1] [INFO] [1751291358.068394830] [zed_multi.zed_front_right]: GNSS fusion status: CALIBRATION_IN_PROGRESS
[component_container_isolated-1] [INFO] [1751291358.068455208] [zed_multi.zed_front_right]: GNSS reference localization initialized
[component_container_isolated-1] [INFO] [1751291358.068476805] [zed_multi.zed_front_right]: Static transform MAP to UTM [map -> utm]
[component_container_isolated-1] [INFO] [1751291358.068492420] [zed_multi.zed_front_right]: * Translation: {542910.444,5229445.292,-1.408}
[component_container_isolated-1] [INFO] [1751291358.068509154] [zed_multi.zed_front_right]: * Rotation: {0.000,0.000,-1.079}
[component_container_isolated-1] [INFO] [1751291358.116438827] [zed_multi.zed_front_right]: GNSS fusion status: CALIBRATION_IN_PROGRESS
[component_container_isolated-1] [INFO] [1751291358.116571901] [zed_multi.zed_front_right]: GNSS reference localization initialized
[component_container_isolated-1] [INFO] [1751291358.116597947] [zed_multi.zed_front_right]: Static transform MAP to UTM [map -> utm]
[component_container_isolated-1] [INFO] [1751291358.116614265] [zed_multi.zed_front_right]: * Translation: {542910.444,5229445.291,-1.408}
[component_container_isolated-1] [INFO] [1751291358.116635895] [zed_multi.zed_front_right]: * Rotation: {0.000,0.000,-1.079}
[component_container_isolated-1] [INFO] [1751291358.125328539] [zed_multi.zed_front_left]: GNSS fusion status: CALIBRATION_IN_PROGRESS
[component_container_isolated-1] [INFO] [1751291358.125460109] [zed_multi.zed_front_left]: GNSS reference localization initialized
[component_container_isolated-1] [INFO] [1751291358.125482699] [zed_multi.zed_front_left]: Static transform MAP to UTM [map -> utm]
[component_container_isolated-1] [INFO] [1751291358.125495658] [zed_multi.zed_front_left]: * Translation: {542910.361,5229445.129,-1.496}
[component_container_isolated-1] [INFO] [1751291358.125600543] [zed_multi.zed_front_left]: * Rotation: {0.000,0.000,-0.624}
[component_container_isolated-1] [INFO] [1751291358.131323540] [zed_multi.zed_rear_right]: GNSS fusion status: CALIBRATION_IN_PROGRESS
[component_container_isolated-1] [INFO] [1751291358.131427401] [zed_multi.zed_rear_right]: GNSS reference localization initialized
[component_container_isolated-1] [INFO] [1751291358.131448423] [zed_multi.zed_rear_right]: Static transform MAP to UTM [map -> utm]
[component_container_isolated-1] [INFO] [1751291358.131462213] [zed_multi.zed_rear_right]: * Translation: {542910.302,5229445.245,-1.389}
[component_container_isolated-1] [INFO] [1751291358.131480803] [zed_multi.zed_rear_right]: * Rotation: {0.000,0.000,-0.144}
[component_container_isolated-1] [INFO] [1751291358.136357711] [zed_multi.zed_rear_left]: GNSS fusion status: CALIBRATION_IN_PROGRESS
[component_container_isolated-1] [INFO] [1751291358.136454309] [zed_multi.zed_rear_left]: GNSS reference localization initialized
[component_container_isolated-1] [INFO] [1751291358.136473635] [zed_multi.zed_rear_left]: Static transform MAP to UTM [map -> utm]
[component_container_isolated-1] [INFO] [1751291358.136486786] [zed_multi.zed_rear_left]: * Translation: {542910.224,5229445.314,-1.294}
[component_container_isolated-1] [INFO] [1751291358.136504576] [zed_multi.zed_rear_left]: * Rotation: {0.000,-0.000,0.893}
[component_container_isolated-1] [INFO] [1751291358.184217759] [zed_multi.zed_front_left]: GNSS fusion status: CALIBRATION_IN_PROGRESS
[component_container_isolated-1] [INFO] [1751291358.184331796] [zed_multi.zed_front_left]: GNSS reference localization initialized
[component_container_isolated-1] [INFO] [1751291358.184351410] [zed_multi.zed_front_left]: Static transform MAP to UTM [map -> utm]
[component_container_isolated-1] [INFO] [1751291358.184369008] [zed_multi.zed_front_left]: * Translation: {542910.361,5229445.129,-1.496}
[component_container_isolated-1] [INFO] [1751291358.184390893] [zed_multi.zed_front_left]: * Rotation: {0.000,0.000,-0.624}
[component_container_isolated-1] [INFO] [1751291358.194808960] [zed_multi.zed_rear_left]: GNSS fusion status: CALIBRATION_IN_PROGRESS
[component_container_isolated-1] [INFO] [1751291358.195334218] [zed_multi.zed_rear_left]: GNSS reference localization initialized
[component_container_isolated-1] [INFO] [1751291358.195361448] [zed_multi.zed_rear_left]: Static transform MAP to UTM [map -> utm]
[component_container_isolated-1] [INFO] [1751291358.195413666] [zed_multi.zed_rear_left]: * Translation: {542910.224,5229445.314,-1.294}
[component_container_isolated-1] [INFO] [1751291358.195436064] [zed_multi.zed_rear_left]: * Rotation: {0.000,-0.000,0.892}
[component_container_isolated-1] [INFO] [1751291358.199026447] [zed_multi.zed_rear_right]: GNSS fusion status: CALIBRATION_IN_PROGRESS
[component_container_isolated-1] [INFO] [1751291358.199117574] [zed_multi.zed_rear_right]: GNSS reference localization initialized
[component_container_isolated-1] [INFO] [1751291358.199138564] [zed_multi.zed_rear_right]: Static transform MAP to UTM [map -> utm]
[component_container_isolated-1] [INFO] [1751291358.199151907] [zed_multi.zed_rear_right]: * Translation: {542910.302,5229445.245,-1.389}
[component_container_isolated-1] [INFO] [1751291358.199169793] [zed_multi.zed_rear_right]: * Rotation: {0.000,0.000,-0.145}
[component_container_isolated-1] [INFO] [1751291358.201115065] [zed_multi.zed_front_right]: GNSS fusion status: CALIBRATION_IN_PROGRESS
[component_container_isolated-1] [INFO] [1751291358.201189425] [zed_multi.zed_front_right]: GNSS reference localization initialized
[component_container_isolated-1] [INFO] [1751291358.201210031] [zed_multi.zed_front_right]: Static transform MAP to UTM [map -> utm]
[component_container_isolated-1] [INFO] [1751291358.201224238] [zed_multi.zed_front_right]: * Translation: {542910.444,5229445.291,-1.408}
[component_container_isolated-1] [INFO] [1751291358.201242028] [zed_multi.zed_front_right]: * Rotation: {0.000,0.000,-1.079}
[component_container_isolated-1] [INFO] [1751291358.249539184] [zed_multi.zed_front_right]: GNSS fusion status: CALIBRATION_IN_PROGRESS
[component_container_isolated-1] [INFO] [1751291358.249688576] [zed_multi.zed_front_right]: GNSS reference localization initialized
[component_container_isolated-1] [INFO] [1751291358.249712926] [zed_multi.zed_front_right]: Static transform MAP to UTM [map -> utm]
[component_container_isolated-1] [INFO] [1751291358.249726492] [zed_multi.zed_front_right]: * Translation: {542910.444,5229445.292,-1.408}
[component_container_isolated-1] [INFO] [1751291358.249744890] [zed_multi.zed_front_right]: * Rotation: {0.000,0.000,-1.079}
[component_container_isolated-1] [INFO] [1751291358.258926540] [zed_multi.zed_rear_left]: GNSS fusion status: CALIBRATION_IN_PROGRESS
[component_container_isolated-1] [INFO] [1751291358.259059582] [zed_multi.zed_rear_left]: GNSS reference localization initialized
[component_container_isolated-1] [INFO] [1751291358.259082012] [zed_multi.zed_rear_left]: Static transform MAP to UTM [map -> utm]
[component_container_isolated-1] [INFO] [1751291358.259096571] [zed_multi.zed_rear_left]: * Translation: {542910.224,5229445.314,-1.294}
[component_container_isolated-1] [INFO] [1751291358.259133879] [zed_multi.zed_rear_left]: * Rotation: {0.000,-0.000,0.892}
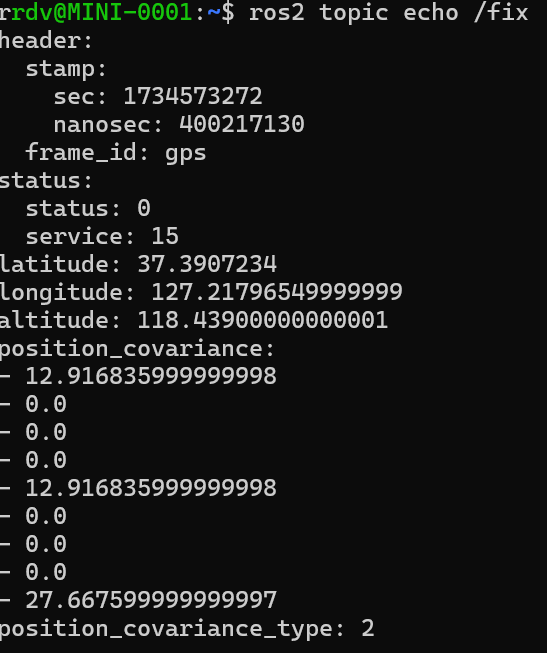
The GPS node pulishes the following topic:
---
header:
stamp:
sec: 1751291321
nanosec: 263034814
frame_id: gps
status:
status: 2
service: 1
latitude: 47.2170733945
longitude: 9.566704929
altitude: 451.3027
position_covariance:
- 0.81
- 0.0
- 0.0
- 0.0
- 0.81
- 0.0
- 0.0
- 0.0
- 0.4651240000000001
position_covariance_type: 2
Could you please provide a hint?