so i have the newest zed sdk file and i successfully upload the packages in my jestson. using ubntun 20.04, niotic. following the command for the object detection tutorial. i get a problem when running this code in ros. rosrun zed_obj_det_sub_tutorial zed_obj_det_sub objects:=/zed2i/zed_node/obj_det/objects. and the problem it says that the ( Error: package ‘zed_obj_det_sub_tutorial’ not found) so what can i do to solve this problem.
Hi @Abod147
Welcome to the Stereolabs community.
Did you install also the zed-ros-examples repository?
yes, i did install it.
In this case, you must be sure that you followed the install instructions to set the environment variables correctly.
Can u provide me with the link for the correct steps of the object detection tutorial?
So, after i run the zed 2i camera how can i enable the object detection to make it (true). And after i make it true what should i do to visualize the results of the object detection?
Thank you for your fast replies always ![]()
You must modify common.yaml to directly enable the object detection when the node starts, or call the enable_object_detection service
hiii @Myzhar, so i enabled the object detection to true and after that i launched the ros pack of the camera, and then while it was loading it loaded a optimizing object accurate. however it stopped at 90.1% with 34 sec remain. do u have any clue what should i do ?
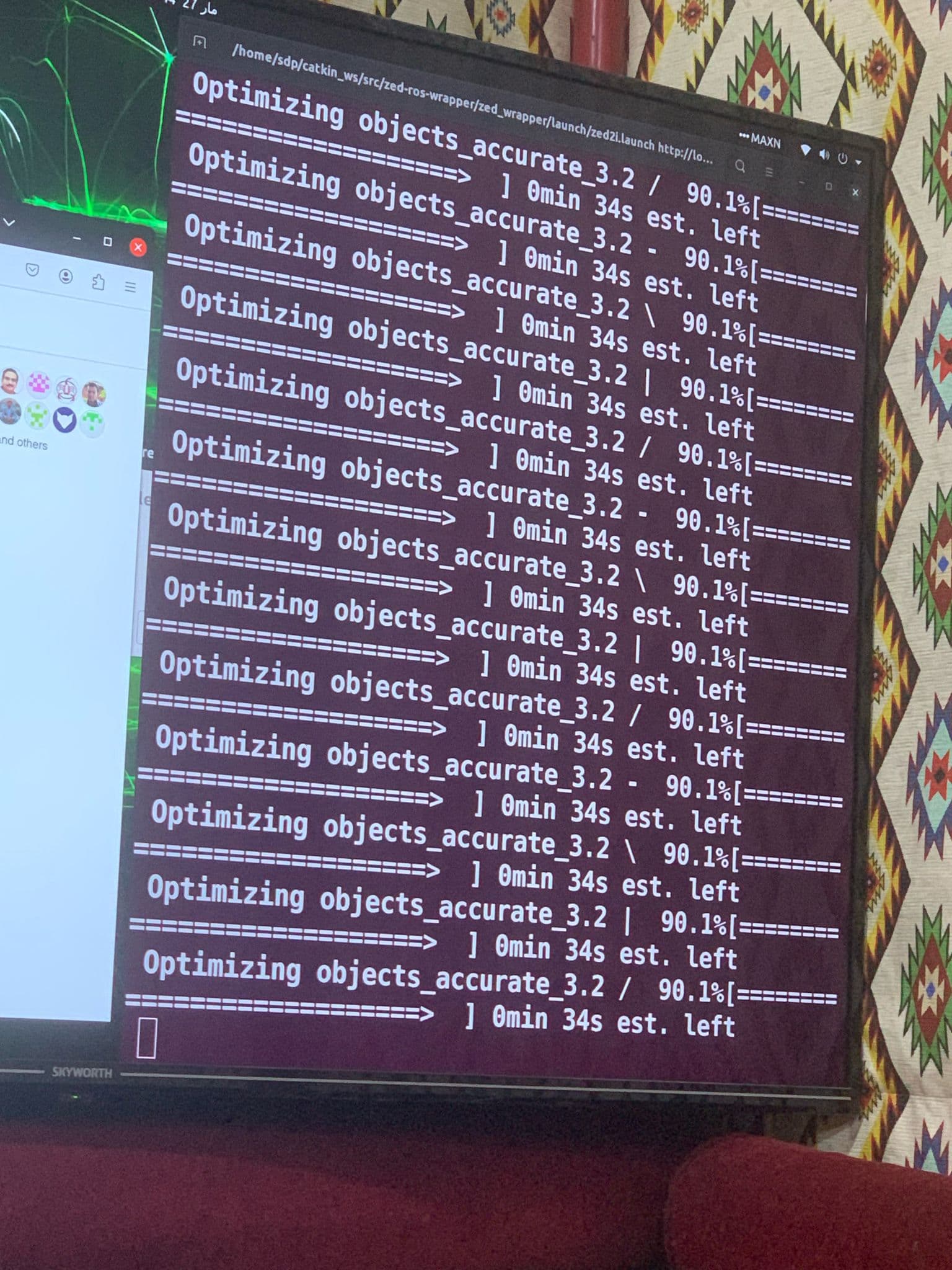
I recommend you manually optimize the AI modules before starting the ROS node: