Hi Stereolabs team,
I’m currently using 3 ZED X cameras with:
ZED SDK: 5.0Driver: 1.3.0Platform: Jetson Orin / Ubuntu 22.04ROS 2 wrapper: latest from GitHub
When I set downscale=3 in the ROS 2 wrapper config, I encounter the following:
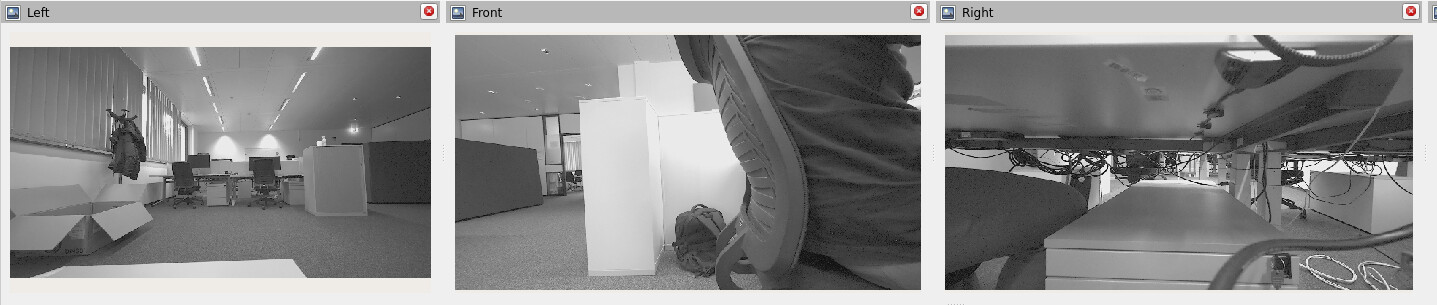
/left/image_rect_color becomes noisy /left/image_rect_gray appears downsized , but only fills the top-left part of the frame. The rest is black (see attached image).This issue happens on all 3 cameras .
No issue occurs when using downscale=2.
IMG_RECT:
IMG_LEFT_GRAY:
IMG_RIGHT_GRAY:
IMG_RAW:
Restarting nodes, containers, and even the device.
Works fine with downscale=1 and downscale=2.
This seems like a bug in the ROS wrapper or the SDK’s image resizing logic when using downscale=3 and onwards downsace 4.
Thanks a lot for the help!
From wrapper launch
omponent_container_isolated-1] [INFO] [1743423612.354739405] [zed_multi.zed_front]: ********************************
[component_container_isolated-1] [INFO] [1743423612.354805381] [zed_multi.zed_front]: ZED Camera Component
[component_container_isolated-1] [INFO] [1743423612.354818153] [zed_multi.zed_front]: ********************************
[component_container_isolated-1] [INFO] [1743423612.354832078] [zed_multi.zed_front]: * namespace: /zed_multi
[INFO] [launch_ros.actions.load_composable_nodes]: Loaded node '/zed_multi/zed_front' in container '/zed_multi/isaac_ros'
[component_container_isolated-1] [INFO] [1743423612.354855446] [zed_multi.zed_front]: * node name: zed_front
[component_container_isolated-1] [INFO] [1743423612.354866906] [zed_multi.zed_front]: ********************************
[component_container_isolated-1] [INFO] [1743423612.405156268] [zed_multi.zed_front]: *** DEBUG parameters ***
[component_container_isolated-1] [INFO] [1743423612.405508040] [zed_multi.zed_front]: * SDK Verbose: 1
[component_container_isolated-1] [INFO] [1743423612.405655804] [zed_multi.zed_front]: * Debug Common: FALSE
[component_container_isolated-1] [INFO] [1743423612.405792332] [zed_multi.zed_front]: * Debug Simulation: FALSE
[component_container_isolated-1] [INFO] [1743423612.405907669] [zed_multi.zed_front]: * Debug Video/Depth: FALSE
[component_container_isolated-1] [INFO] [1743423612.406041892] [zed_multi.zed_front]: * Debug Control settings: FALSE
[component_container_isolated-1] [INFO] [1743423612.406155340] [zed_multi.zed_front]: * Debug Point Cloud: FALSE
[component_container_isolated-1] [INFO] [1743423612.406263922] [zed_multi.zed_front]: * Debug GNSS: FALSE
[component_container_isolated-1] [INFO] [1743423612.406371768] [zed_multi.zed_front]: * Debug Positional Tracking: FALSE
[component_container_isolated-1] [INFO] [1743423612.406492866] [zed_multi.zed_front]: * Debug sensors: FALSE
[component_container_isolated-1] [INFO] [1743423612.406606442] [zed_multi.zed_front]: * Debug Mapping: FALSE
[component_container_isolated-1] [INFO] [1743423612.406756127] [zed_multi.zed_front]: * Debug Object Detection: FALSE
[component_container_isolated-1] [INFO] [1743423612.406867334] [zed_multi.zed_front]: * Debug Body Tracking: FALSE
[component_container_isolated-1] [INFO] [1743423612.406988561] [zed_multi.zed_front]: * Debug Streaming: FALSE
[component_container_isolated-1] [INFO] [1743423612.407108283] [zed_multi.zed_front]: * Debug ROI: FALSE
[component_container_isolated-1] [INFO] [1743423612.407214208] [zed_multi.zed_front]: * Debug Advanced: FALSE
[component_container_isolated-1] [INFO] [1743423612.407360724] [zed_multi.zed_front]: *** GENERAL parameters ***
[component_container_isolated-1] [INFO] [1743423612.407697610] [zed_multi.zed_front]: * Camera model: zedx - ZED X
[component_container_isolated-1] [INFO] [1743423612.407827992] [zed_multi.zed_front]: * Camera name: zed_front
[component_container_isolated-1] [INFO] [1743423612.407938463] [zed_multi.zed_front]: * Camera SN: 41197812
[component_container_isolated-1] [INFO] [1743423612.408042115] [zed_multi.zed_front]: * Camera ID: -1
[component_container_isolated-1] [INFO] [1743423612.408169936] [zed_multi.zed_front]: * Camera timeout [sec]: 5
[component_container_isolated-1] [INFO] [1743423612.408274549] [zed_multi.zed_front]: * Camera reconnection temptatives: 5
[component_container_isolated-1] [INFO] [1743423612.408387228] [zed_multi.zed_front]: * Camera framerate: 30
[component_container_isolated-1] [INFO] [1743423612.408509671] [zed_multi.zed_front]: * GPU ID: -1
[component_container_isolated-1] [INFO] [1743423612.408626256] [zed_multi.zed_front]: * Asynchronous image retrieval: FALSE
[component_container_isolated-1] [INFO] [1743423612.408751965] [zed_multi.zed_front]: * Image Validity Check: DISABLED
[component_container_isolated-1] [INFO] [1743423612.408910773] [zed_multi.zed_front]: * Camera resolution: HD1080
[component_container_isolated-1] [INFO] [1743423612.409031423] [zed_multi.zed_front]: * Publishing resolution: CUSTOM
[component_container_isolated-1] [INFO] [1743423612.409173201] [zed_multi.zed_front]: * Publishing downscale factor: 3
[component_container_isolated-1] [INFO] [1743423612.409288185] [zed_multi.zed_front]: * OpenCV custom calibration:
[component_container_isolated-1] [INFO] [1743423612.409408740] [zed_multi.zed_front]: * Camera self calibration: TRUE
[component_container_isolated-1] [INFO] [1743423612.409518250] [zed_multi.zed_front]: * Camera flip: FALSE
[component_container_isolated-1] [INFO] [1743423612.409633395] [zed_multi.zed_front]: * [DYN] Publish framerate [Hz]: 30
[component_container_isolated-1] [INFO] [1743423612.409657179] [zed_multi.zed_front]: *** VIDEO parameters ***
[component_container_isolated-1] [INFO] [1743423612.409782823] [zed_multi.zed_front]: * [DYN] Saturation: 4
[component_container_isolated-1] [INFO] [1743423612.409892046] [zed_multi.zed_front]: * [DYN] Sharpness: 4
[component_container_isolated-1] [INFO] [1743423612.413745304] [zed_multi.zed_front]: * [DYN] Gamma: 8
[component_container_isolated-1] [INFO] [1743423612.414713997] [zed_multi.zed_front]: * [DYN] Auto Exposure/Gain: TRUE
[component_container_isolated-1] [INFO] [1743423612.414927064] [zed_multi.zed_front]: * [DYN] Exposure: 80
[component_container_isolated-1] [INFO] [1743423612.415127838] [zed_multi.zed_front]: * [DYN] Gain: 80
[component_container_isolated-1] [INFO] [1743423612.415266383] [zed_multi.zed_front]: * [DYN] Auto White Balance: TRUE
[component_container_isolated-1] [INFO] [1743423612.415379735] [zed_multi.zed_front]: * [DYN] White Balance Temperature: 42
[component_container_isolated-1] [INFO] [1743423612.415513222] [zed_multi.zed_front]: * [DYN] ZED X Exposure time: 16000
[component_container_isolated-1] [INFO] [1743423612.415636978] [zed_multi.zed_front]: * [DYN] ZED X Auto Exp. time range min: 28
[component_container_isolated-1] [INFO] [1743423612.415757596] [zed_multi.zed_front]: * [DYN] ZED X Auto Exp. time range max: 30000
[component_container_isolated-1] [INFO] [1743423612.415880839] [zed_multi.zed_front]: * [DYN] ZED X Exposure comp.: 50
[component_container_isolated-1] [INFO] [1743423612.415997008] [zed_multi.zed_front]: * [DYN] ZED X Analog Gain: 1255
[component_container_isolated-1] [INFO] [1743423612.416108407] [zed_multi.zed_front]: * [DYN] ZED X Auto Analog Gain range min: 1000
[component_container_isolated-1] [INFO] [1743423612.416241222] [zed_multi.zed_front]: * [DYN] ZED X Auto Analog Gain range max: 16000
[component_container_isolated-1] [INFO] [1743423612.416356623] [zed_multi.zed_front]: * [DYN] ZED X Digital Gain: 1
[component_container_isolated-1] [INFO] [1743423612.416468854] [zed_multi.zed_front]: * [DYN] ZED X Auto Digital Gain range min: 1
[component_container_isolated-1] [INFO] [1743423612.416591713] [zed_multi.zed_front]: * [DYN] ZED X Auto Digital Gain range max: 256
[component_container_isolated-1] [INFO] [1743423612.416700551] [zed_multi.zed_front]: * [DYN] ZED X Auto Digital Gain range max: 50
[component_container_isolated-1] [INFO] [1743423612.416735188] [zed_multi.zed_front]: *** DEPTH parameters ***
[component_container_isolated-1] [INFO] [1743423612.416882151] [zed_multi.zed_front]: * Depth mode: NEURAL LIGHT [4]
[component_container_isolated-1] [INFO] [1743423612.417021144] [zed_multi.zed_front]: * Min depth [m]: 0.3
[component_container_isolated-1] [INFO] [1743423612.417133312] [zed_multi.zed_front]: * Max depth [m]: 10
[component_container_isolated-1] [INFO] [1743423612.417262605] [zed_multi.zed_front]: * Depth Stabilization: 0
[component_container_isolated-1] [INFO] [1743423612.417375605] [zed_multi.zed_front]: * OpenNI mode (16bit point cloud): FALSE
[component_container_isolated-1] [INFO] [1743423612.417483067] [zed_multi.zed_front]: * [DYN] Point cloud rate [Hz]: 1
[component_container_isolated-1] [INFO] [1743423612.417620619] [zed_multi.zed_front]: * Point cloud resolution: REDUCED
[component_container_isolated-1] [INFO] [1743423612.417724528] [zed_multi.zed_front]: * [DYN] Depth Confidence: 95
[component_container_isolated-1] [INFO] [1743423612.417852412] [zed_multi.zed_front]: * [DYN] Depth Texture Confidence: 100
[component_container_isolated-1] [INFO] [1743423612.417973159] [zed_multi.zed_front]: * [DYN] Remove saturated areas: TRUE
[component_container_isolated-1] [INFO] [1743423612.418006643] [zed_multi.zed_front]: *** GNSS FUSION parameters ***
[component_container_isolated-1] [INFO] [1743423612.418130718] [zed_multi.zed_front]: * GNSS fusion enabled: FALSE
[component_container_isolated-1] [INFO] [1743423612.418153414] [zed_multi.zed_front]: *** POSITIONAL TRACKING parameters ***
[component_container_isolated-1] [INFO] [1743423612.418264013] [zed_multi.zed_front]: * Positional tracking enabled: FALSE
[component_container_isolated-1] [INFO] [1743423612.418398524] [zed_multi.zed_front]: * Positional tracking mode: GEN 1
[component_container_isolated-1] [INFO] [1743423612.418522536] [zed_multi.zed_front]: * Map frame id: map
[component_container_isolated-1] [INFO] [1743423612.418628109] [zed_multi.zed_front]: * Odometry frame id: odom
[component_container_isolated-1] [INFO] [1743423612.418738996] [zed_multi.zed_front]: * Broadcast Odometry TF: FALSE
[component_container_isolated-1] [INFO] [1743423612.418775873] [zed_multi.zed_front]: * Broadcast Pose TF: FALSE
[component_container_isolated-1] [INFO] [1743423612.418874916] [zed_multi.zed_front]: * [DYN] Depth minimum range: 0
[component_container_isolated-1] [INFO] [1743423612.418992365] [zed_multi.zed_front]: * [DYN] TF timestamp offset: 0
[component_container_isolated-1] [INFO] [1743423612.419116921] [zed_multi.zed_front]: * [DYN] Path publishing rate: 2
[component_container_isolated-1] [INFO] [1743423612.419234210] [zed_multi.zed_front]: * Path history lenght: 2
[component_container_isolated-1] [INFO] [1743423612.419354413] [zed_multi.zed_front]: * Initial pose: [0,0,0,0,0,0,]
[component_container_isolated-1] [INFO] [1743423612.419489724] [zed_multi.zed_front]: * Area Memory: FALSE
[component_container_isolated-1] [INFO] [1743423612.419609094] [zed_multi.zed_front]: * Area Memory DB:
[component_container_isolated-1] [INFO] [1743423612.419724975] [zed_multi.zed_front]: * Camera is static: FALSE
[component_container_isolated-1] [INFO] [1743423612.419842680] [zed_multi.zed_front]: * Gravity as origin [not for ZED]: TRUE
[component_container_isolated-1] [INFO] [1743423612.419952735] [zed_multi.zed_front]: * IMU Fusion [not for ZED]: TRUE
[component_container_isolated-1] [INFO] [1743423612.420059364] [zed_multi.zed_front]: * Floor Alignment: FALSE
[component_container_isolated-1] [INFO] [1743423612.420188978] [zed_multi.zed_front]: * Reset Odometry with Loop Closure: FALSE
[component_container_isolated-1] [INFO] [1743423612.420298713] [zed_multi.zed_front]: * 2D mode: FALSE
[component_container_isolated-1] [INFO] [1743423612.420413857] [zed_multi.zed_front]: * Reset pose with SVO loop: TRUE
[component_container_isolated-1] [INFO] [1743423612.420479832] [zed_multi.zed_front]: *** Region of Interest parameters ***
[component_container_isolated-1] [INFO] [1743423612.420595841] [zed_multi.zed_front]: * Automatic ROI generation: FALSE
[component_container_isolated-1] [INFO] [1743423612.420786148] [zed_multi.zed_front]: * Manual ROI polygon: [[0.0, 0.3], [1.0, 0.3], [1.0, 0.8], [0.0, 0.8]]
[component_container_isolated-1] [INFO] [1743423612.420909231] [zed_multi.zed_front]: * Apply to depth: TRUE
[component_container_isolated-1] [INFO] [1743423612.421030778] [zed_multi.zed_front]: * Apply to positional tracking: TRUE
[component_container_isolated-1] [INFO] [1743423612.421151044] [zed_multi.zed_front]: * Apply to object detection: TRUE
[component_container_isolated-1] [INFO] [1743423612.421262764] [zed_multi.zed_front]: * Apply to body tracking: TRUE
[component_container_isolated-1] [INFO] [1743423612.421376916] [zed_multi.zed_front]: * Apply to spatial mapping: TRUE
[component_container_isolated-1] [INFO] [1743423612.421399964] [zed_multi.zed_front]: *** SENSORS STACK parameters ***
[component_container_isolated-1] [INFO] [1743423612.421515300] [zed_multi.zed_front]: * Broadcast IMU TF [not for ZED]: FALSE
[component_container_isolated-1] [INFO] [1743423612.421639472] [zed_multi.zed_front]: * Sensors Camera Sync: FALSE
[component_container_isolated-1] [INFO] [1743423612.421749527] [zed_multi.zed_front]: * Sensors publishing rate: 200 Hz
[component_container_isolated-1] [INFO] [1743423612.421773567] [zed_multi.zed_front]: *** Spatial Mapping parameters ***
[component_container_isolated-1] [INFO] [1743423612.421894538] [zed_multi.zed_front]: * Spatial Mapping Enabled: FALSE
[component_container_isolated-1] [INFO] [1743423612.430309400] [zed_multi.zed_front]: * Spatial Mapping resolution [m]: 0.05
[component_container_isolated-1] [INFO] [1743423612.430639981] [zed_multi.zed_front]: * 3D Max Mapping range [m]: 5
[component_container_isolated-1] [INFO] [1743423612.430777789] [zed_multi.zed_front]: * Map publishing rate [Hz]: 1
[component_container_isolated-1] [INFO] [1743423612.430928786] [zed_multi.zed_front]: * Clicked point topic: /clicked_point
[component_container_isolated-1] [INFO] [1743423612.431041402] [zed_multi.zed_front]: * Plane Det. Max Dist. Thresh.: 0.15
[component_container_isolated-1] [INFO] [1743423612.431180555] [zed_multi.zed_front]: * Plane Det. Normals Sim. Thresh.: 15
[component_container_isolated-1] [INFO] [1743423612.431214743] [zed_multi.zed_front]: *** Object Det. parameters ***
[component_container_isolated-1] [INFO] [1743423612.431323485] [zed_multi.zed_front]: * Object Det. enabled: FALSE
[component_container_isolated-1] [INFO] [1743423612.431474738] [zed_multi.zed_front]: * Object Det. model: MULTI CLASS BOX FAST
[component_container_isolated-1] [INFO] [1743423612.431600991] [zed_multi.zed_front]: * Object Det. allow reduced precision: TRUE
[component_container_isolated-1] [INFO] [1743423612.431720969] [zed_multi.zed_front]: * Object Det. maximum range [m]: 20
[component_container_isolated-1] [INFO] [1743423612.431846069] [zed_multi.zed_front]: * Object Det. min. confidence: 75
[component_container_isolated-1] [INFO] [1743423612.431971009] [zed_multi.zed_front]: * Object Det. prediction timeout [sec]: 0.5
[component_container_isolated-1] [INFO] [1743423612.432094028] [zed_multi.zed_front]: * Object Det. tracking: TRUE
[component_container_isolated-1] [INFO] [1743423612.432230652] [zed_multi.zed_front]: * Object Filtering mode: 1 - NMS3D
[component_container_isolated-1] [INFO] [1743423612.432341795] [zed_multi.zed_front]: * MultiClassBox people: TRUE
[component_container_isolated-1] [INFO] [1743423612.432453770] [zed_multi.zed_front]: * MultiClassBox vehicles: TRUE
[component_container_isolated-1] [INFO] [1743423612.432579159] [zed_multi.zed_front]: * MultiClassBox bags: TRUE
[component_container_isolated-1] [INFO] [1743423612.432697248] [zed_multi.zed_front]: * MultiClassBox animals: TRUE
[component_container_isolated-1] [INFO] [1743423612.432803878] [zed_multi.zed_front]: * MultiClassBox electronics: TRUE
[component_container_isolated-1] [INFO] [1743423612.432932531] [zed_multi.zed_front]: * MultiClassBox fruits and vegetables: TRUE
[component_container_isolated-1] [INFO] [1743423612.433052637] [zed_multi.zed_front]: * MultiClassBox sport-related objects: TRUE
[component_container_isolated-1] [INFO] [1743423612.433090762] [zed_multi.zed_front]: *** Body Track. parameters ***
[component_container_isolated-1] [INFO] [1743423612.433197936] [zed_multi.zed_front]: * Body Track. enabled: FALSE
[component_container_isolated-1] [INFO] [1743423612.433341891] [zed_multi.zed_front]: * Body Track. model: HUMAN BODY MEDIUM
[component_container_isolated-1] [INFO] [1743423612.433468367] [zed_multi.zed_front]: * Body Track. format: BODY 38
[component_container_isolated-1] [INFO] [1743423612.433593243] [zed_multi.zed_front]: * Body Track. allow reduced precision: TRUE
[component_container_isolated-1] [INFO] [1743423612.433699360] [zed_multi.zed_front]: * Body Track. maximum range [m]: 20
[component_container_isolated-1] [INFO] [1743423612.433812264] [zed_multi.zed_front]: * Body Track. KP selection: FULL
[component_container_isolated-1] [INFO] [1743423612.433965790] [zed_multi.zed_front]: * Body fitting: FALSE
[component_container_isolated-1] [INFO] [1743423612.434101774] [zed_multi.zed_front]: * Body joints tracking: TRUE
[component_container_isolated-1] [INFO] [1743423612.434227866] [zed_multi.zed_front]: * Body Track. prediction timeout [sec]: 0.5
[component_container_isolated-1] [INFO] [1743423612.434404024] [zed_multi.zed_front]: * Body Track. confidence thresh.: 50
[component_container_isolated-1] [INFO] [1743423612.434520065] [zed_multi.zed_front]: * Body Track. min. KP thresh.: 5
[component_container_isolated-1] [INFO] [1743423612.434544330] [zed_multi.zed_front]: *** Streaming Server parameters ***
[component_container_isolated-1] [INFO] [1743423612.434663411] [zed_multi.zed_front]: * Streaming Server enabled: FALSE
[component_container_isolated-1] [INFO] [1743423612.434777596] [zed_multi.zed_front]: * Stream codec: H264
[component_container_isolated-1] [INFO] [1743423612.434886658] [zed_multi.zed_front]: * Stream port: 30000
[component_container_isolated-1] [INFO] [1743423612.435017136] [zed_multi.zed_front]: * Stream bitrate: 12500
[component_container_isolated-1] [INFO] [1743423612.435127991] [zed_multi.zed_front]: * Stream GOP size: -1
[component_container_isolated-1] [INFO] [1743423612.435247649] [zed_multi.zed_front]: * Stream Chunk size: 16084
[component_container_isolated-1] [INFO] [1743423612.435368811] [zed_multi.zed_front]: * Adaptive bitrate: FALSE
[component_container_isolated-1] [INFO] [1743423612.435537159] [zed_multi.zed_front]: * Target frame rate:0
[component_container_isolated-1] [INFO] [1743423612.435559823] [zed_multi.zed_front]: *** Advanced parameters ***
[component_container_isolated-1] [INFO] [1743423612.435661522] [zed_multi.zed_front]: * Thread sched. policy: SCHED_BATCH
[component_container_isolated-1] [INFO] [1743423612.435780892] [zed_multi.zed_front]: *** SERVICES ***
[component_container_isolated-1] [INFO] [1743423612.436664883] [zed_multi.zed_front]: * '/zed_multi/zed_front/reset_odometry'
[component_container_isolated-1] [INFO] [1743423612.446613469] [zed_multi.zed_front]: * '/zed_multi/zed_front/reset_pos_tracking'
[component_container_isolated-1] [INFO] [1743423612.448194793] [zed_multi.zed_front]: * '/zed_multi/zed_front/set_pose'
[component_container_isolated-1] [INFO] [1743423612.448691800] [zed_multi.zed_front]: * '/zed_multi/zed_front/enable_obj_det'
[component_container_isolated-1] [INFO] [1743423612.449042163] [zed_multi.zed_front]: * '/zed_multi/zed_front/enable_body_trk'
[component_container_isolated-1] [INFO] [1743423612.449319220] [zed_multi.zed_front]: * '/zed_multi/zed_front/enable_mapping'
[component_container_isolated-1] [INFO] [1743423612.449661997] [zed_multi.zed_front]: * '/zed_multi/zed_front/enable_streaming'
[component_container_isolated-1] [INFO] [1743423612.462302025] [zed_multi.zed_front]: * '/zed_multi/zed_front/start_svo_rec'
[component_container_isolated-1] [INFO] [1743423612.463341879] [zed_multi.zed_front]: * '/zed_multi/zed_front/stop_svo_rec'
[component_container_isolated-1] [INFO] [1743423612.464360605] [zed_multi.zed_front]: * '/zed_multi/zed_front/set_roi'
[component_container_isolated-1] [INFO] [1743423612.465255864] [zed_multi.zed_front]: * '/zed_multi/zed_front/reset_roi'
[component_container_isolated-1] [INFO] [1743423612.466097024] [zed_multi.zed_front]: ***** STARTING CAMERA *****
[joint_state_publisher-4] [INFO] [1743423612.581647572] [joint_state_publisher]: Waiting for robot_description to be published on the robot_description topic...
[component_container_isolated-1] [INFO] [1743423612.597531845] [zed_multi.zed_front]: ZED SDK Version: 5.0.0 - Build 99275_9ed05d06
[component_container_isolated-1] [INFO] [1743423612.601061118] [zed_multi.zed_front]: *** CAMERA OPENING ***
[component_container_isolated-1] [2025-03-31 12:20:13 UTC][ZED][INFO] Logging level INFO
[component_container_isolated-1] [2025-03-31 12:20:14 UTC][ZED][INFO] [Init] Depth mode: NEURAL LIGHT
[component_container_isolated-1] [2025-03-31 12:20:17 UTC][ZED][INFO] [Init] Camera FW version: 2001
[component_container_isolated-1] [2025-03-31 12:20:17 UTC][ZED][INFO] [Init] Video mode: HD1080@30
[component_container_isolated-1] [2025-03-31 12:20:17 UTC][ZED][INFO] [Init] Serial Number: S/N 41197812
[component_container_isolated-1] [INFO] [1743423618.643458591] [zed_multi.zed_front]: ZED SDK running on GPU #0
[component_container_isolated-1] [INFO] [1743423618.643572965] [zed_multi.zed_front]: * Camera Model -> ZED X
[component_container_isolated-1] [INFO] [1743423618.643588714] [zed_multi.zed_front]: * Serial Number -> 41197812
[component_container_isolated-1] [INFO] [1743423618.643728664] [zed_multi.zed_front]: * Focal Lenght -> 2.22325 mm
[component_container_isolated-1] [INFO] [1743423618.643757634] [zed_multi.zed_front]: * Input -> GMSL
[component_container_isolated-1] [INFO] [1743423618.643775944] [zed_multi.zed_front]: * Camera FW Version -> 2001
[component_container_isolated-1] [INFO] [1743423618.643787403] [zed_multi.zed_front]: * Sensors FW Version -> 1000
[component_container_isolated-1] [INFO] [1743423618.643800368] [zed_multi.zed_front]: * Camera grab size -> 1920x1080
[component_container_isolated-1] [INFO] [1743423618.643810803] [zed_multi.zed_front]: * Color/Depth publishing size -> 640x360
[component_container_isolated-1] [INFO] [1743423618.643820278] [zed_multi.zed_front]: * Point Cloud publishing size -> 224x128
[component_container_isolated-1] [INFO] [1743423618.643828473] [zed_multi.zed_front]: *** Setting Manual ROI ***
[component_container_isolated-1] [INFO] [1743423618.667886598] [zed_multi.zed_front]: * Manual Region of Interest correctly set.
[component_container_isolated-1] [INFO] [1743423618.668039320] [zed_multi.zed_front]: *** TF FRAMES ***
[component_container_isolated-1] [INFO] [1743423618.668060767] [zed_multi.zed_front]: * Map -> map
[component_container_isolated-1] [INFO] [1743423618.668073956] [zed_multi.zed_front]: * Odometry -> odom
[component_container_isolated-1] [INFO] [1743423618.668084871] [zed_multi.zed_front]: * Base -> zed_front_camera_link
[component_container_isolated-1] [INFO] [1743423618.668095083] [zed_multi.zed_front]: * Camera -> zed_front_camera_center
[component_container_isolated-1] [INFO] [1743423618.668103918] [zed_multi.zed_front]: * Left -> zed_front_left_camera_fr
Also here is my diagnostic report. I would love to hear a response, if there is some triaIs I can do or some actions I can take.
I would like to work with NEURAL_LIGHT, therefore I cannot rollback to previous SDK.
ZED_Diagnostic_Results.json (27.0 KB)
Myzhar
April 1, 2025, 12:19pm
4
Hi @ba2sakal master branch?git pull and rebuild your packages?
Hi @Myzhar ,
I had the gray image issue this morning but I had another issue today where my Jetson AGX Orin started making a constant beeping sound and would no longer boot. This happened after I attempted to connect and initialize 4 ZED X cameras on the same serializer several times. The cameras began to behave unexpectedly — they failed to initialize, and I saw errors like nvbuf: -1 from ROS Wrapper node. After rebooting, the Jetson entered a constant beep loop and was unresponsive to any recovery attempts.
I suspect this was caused by a problem with the kernel overlay or DTB with new ZED driver installation, but I’m not entirely sure. I ended up reflashing the system and reinstalling everything from scratch, and it works fine again now. Also somehow the gray image resize issue is solved.
Have you seen anything similar, or do you have any insights into what might have caused this behavior? I’d really appreciate your thoughts, especially since this could potentially happen again when working with multiple cameras.
Thanks a lot!
Hey @Myzhar
This morning I tried my configuration with 3 cameras and it again gave the wrong sized gray image. I connect 3 cameras into the same serializer port.
I cloned master and rebuild and tried but result is the same:
left/image_rect_gray
/left/image_raw_gray is indeed without problem:
This problem occurs from Downscale 3. Any idea what might cause the problem or how I might solve?
Thanks!
Also good to include,
The rectified left/img_rect_color has the noise as it had with SDK 4.2( or the driver that time)
left/img_raw_color
left/img_rect_color
The /right/img_rect_color doesn’t have this blur therefore it doesn’t have the resizing issue of the gray image .
So I assume there would be a problem in the rectification step of the left images.
I just rolled backed to SDK 4.2.3, and the problem doesn’t occur.
Myzhar
April 2, 2025, 9:37am
9
You must use the ZED X Driver v.1.3.0 with ZED SDK 5.0 to correctly work with more than two cameras connected to the same 4-wire GMSL2 cable
@Myzhar
Yes of course, I am running everything with ZEDX Driver v.1.3.0. You can check the diagnostics that I shared in my previous answer.
"Dpkg list Stereolabs": [
"ii stereolabs-zedlink-quad 1.3.0-SL-MAX96712-all-L4T36.4.0 arm64 NVIDIA Kernel DTB Modified Package by Stereolabs"
],
For now to isolate the problem I only connect 1 camera.
To further isolate I tried the error more with different configurations.
In ZED SDK 4.2.3 + Driver 1.3: there is never problem.
When I switch back to ZED SDK 5 + Driver 1.3:
With NONE = There is no problem
With NEURAL_LIGHT = I have the error that
right images are all right.
Same with NEURAL…
Do you think maybe it is issue with GPU Memory or ?
I can provide some more log if you want.
Thanks!
Myzhar
April 2, 2025, 12:40pm
11
Can you try to tune the dynamic parameter video.denoising
Myzhar
April 2, 2025, 12:59pm
12
The VIEW::LEFT_GRAY is not cropped, it’s wrongly copied in the memory at the SDK level.VIEW::RIGHT_GRAY image is not affected by this problem
Myzhar
April 4, 2025, 9:06am
14
Hi @ba2sakal
1 Like
Hi @Myzhar ,
I just saw there is a a minor SDK update. Firstly, thanks for the work!
I have seen in the release notes:
Fixed incorrect retrieveImage output when using specific resolutions. The issue could affect grayscale or low-resolution images.
I assume this fix regarding our discussion on this topic, is it a correct assumption?
Thanks!