System Specifications(on which Zed2i is tested):
- Ubuntu 22.04
- CPU: Intel i7-11700KF @ 3.6GHz x 16
- GPU: NVIDIA RTX A2000 12GB
- CUDA 12.4
- ZED SDK 4.1.2
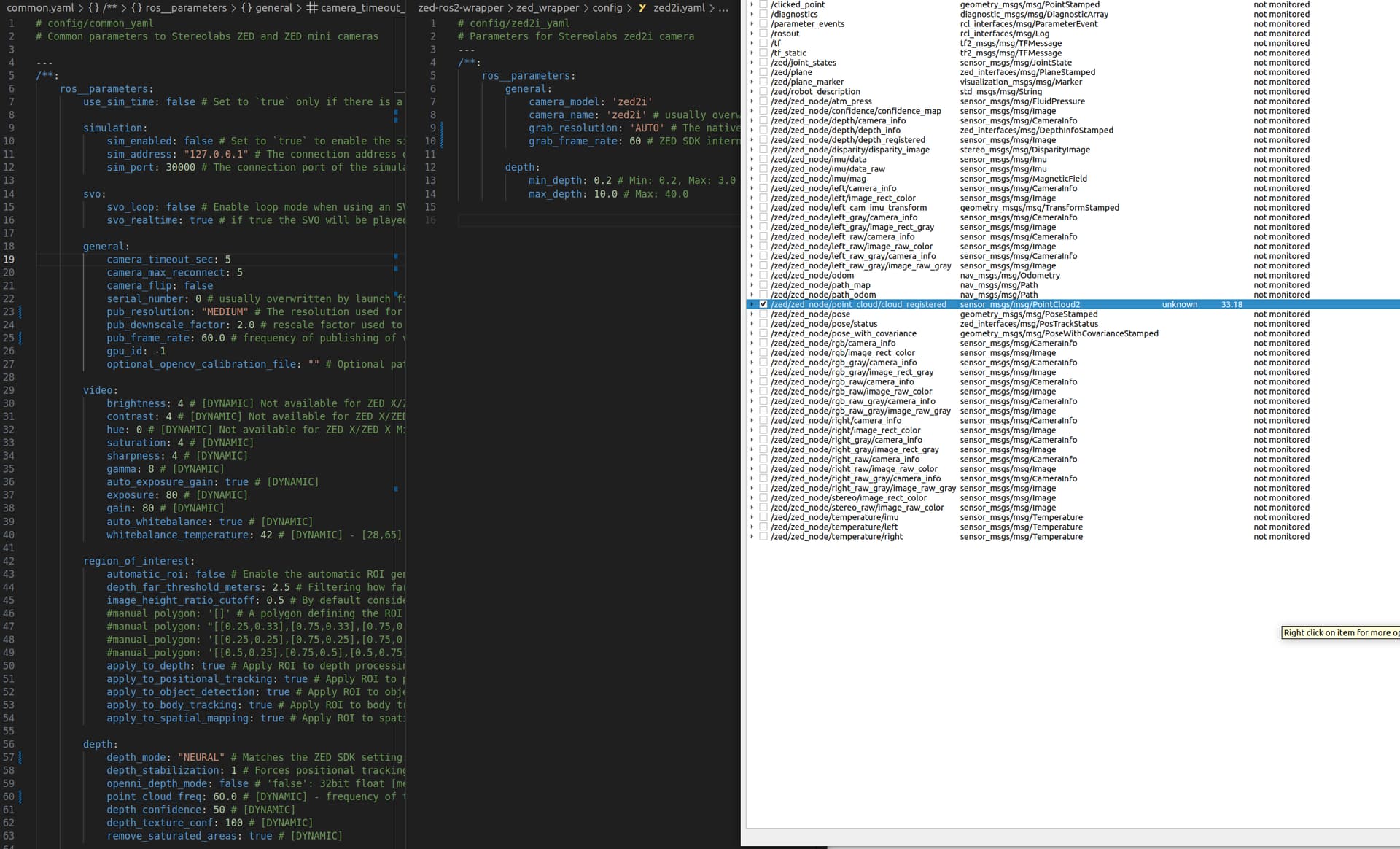
While testing the zed-ros2 wrapper, we tried to publish the images. depth map and point cloud data at 60 Hz by changing the following parameters:
In common.yaml:
- general.pub_frame_rate:60
- depth.point_cloud_freq:60
In zed2i.yaml:
- general.grab_frame_rate:60
The images are getting published at ~60 Hz but the point cloud is only published at ~35Hz (refer attached screenshot).
In the ZED Depth Viewer, the rgb image, depth map and the point cloud seem like they are getting published at 60 Hz. Is this a zed-ros2 wrapper issue?