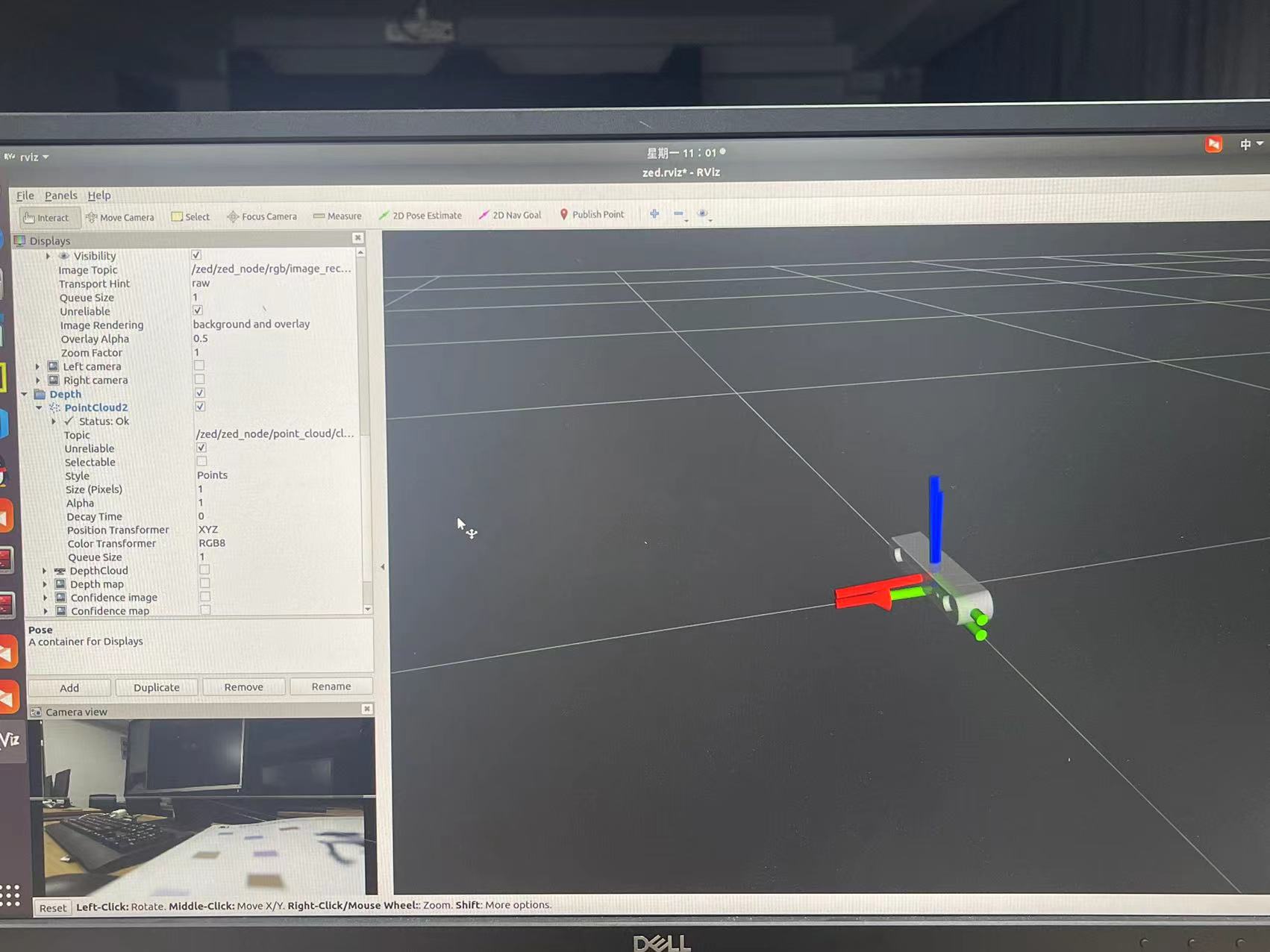
Can you enable the Depth Map topic in Rviz and show me the result?
What is the fixed frame value in Global Options?
Can you also run the roswtf command in a new console while the nodes are running and post here the output?
Sorry, I don’t know why the photos I uploaded can’t be displayed.
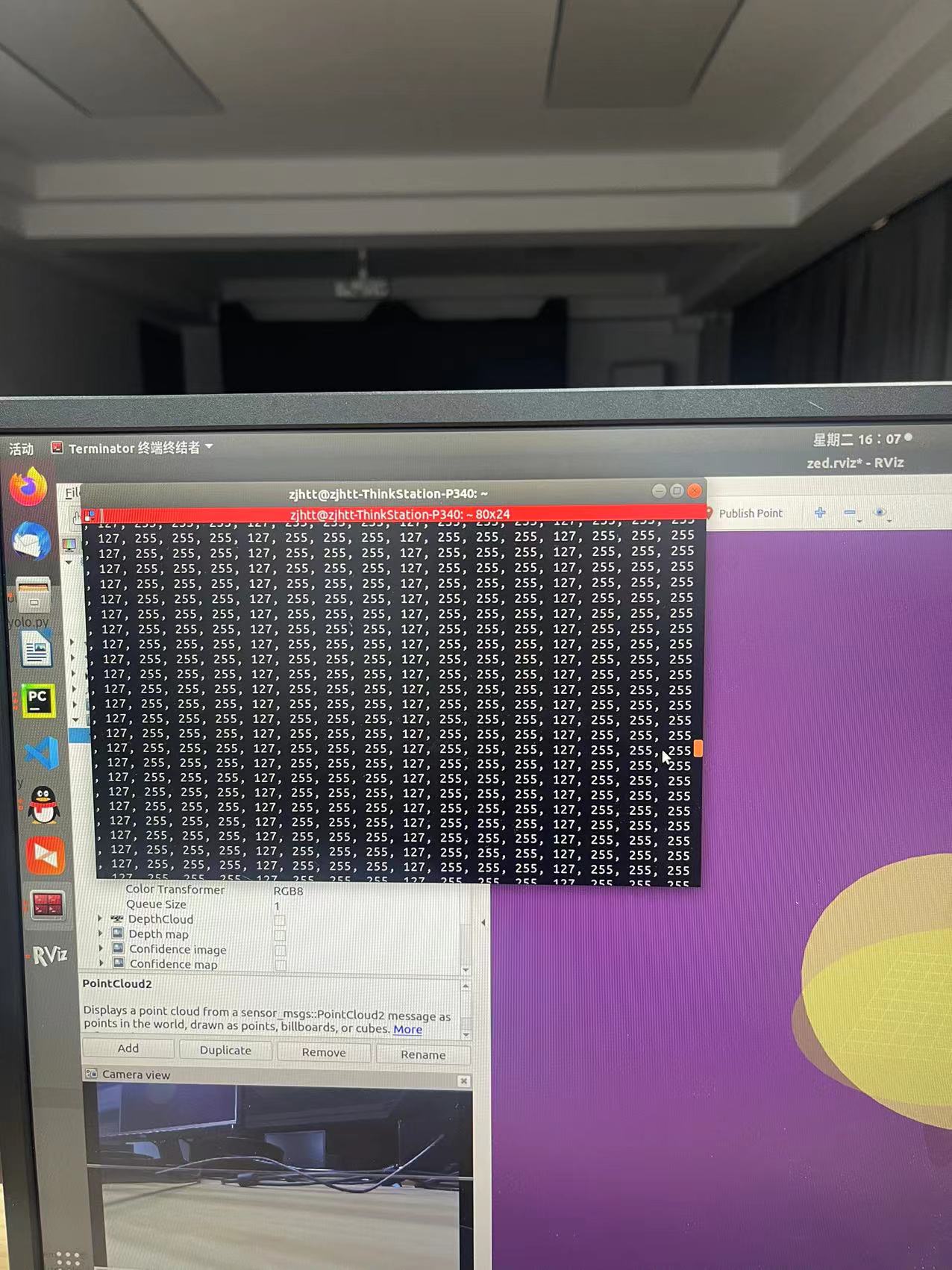
When I used command “rostopic echo /zed/zed_node/depth/depth_registered”, the result is similar to that of point cloud :255, 255, 255, 127, 255, 255, 255, 127, 255, 255, 255, 127, 255, 255, 255, 127, 255, 255, 255, 127, 255, 255, 255, 127, 255, 255, 255, 127, 255, 255, 255, 127, 255, 255, 255, 127, 255, 255, 255, 127, 255, 255, 255, 127, 255, 255, 255, 127, 255, 255, 255, 127, 255, 255, 255, 127, 255, 255, 255, 127, 255, 255, 255, 127, 255, 255, 255, 127, 255, 255, 255, 127, 255, 255, 255, 127, 255, 255, 255, 127, 255, 255, 255, 127, 255, 255, 255, 127, 255, 255, 255, 127, 255, 255, 255, 127]
When I used command “roswtf”, it gives the result as follows:
Loaded plugin tf.tfwtf
No package or stack in the current directory
Static checks summary:
No errors or warnings
Beginning tests of your ROS graph. These may take a while…
analyzing graph…
… done analyzing graph
running graph rules…
… done running graph rules
running tf checks, this will take a second…
… tf checks complete
Online checks summary:
Found 1 warning(s).
Warnings are things that may be just fine, but are sometimes at fault
WARNING The following node subscriptions are unconnected:
Do you already figure out the solution? I encountered the same issue when I use the neural depth mode in ROS Melodic, while all the other depth modes work well. Tyvm
@Wangbo Thank you for your reply. Are you running the SDK or ROS node inside the docker containers? I encounter this issue only inside the docker container but works fine on the host instead. I guess it results from the deployment of the neural inference model inside the container.