Hi, @Myzhar I encountered the same issue when using the neural depth mode in ROS melodic. The running env docker container stereolabs/zed:3.7-gl-devel-cuda10.2-ubuntu18.04. It seems like the same issue No point cloud information is displayed in Rviz - #15 by lidingGK.
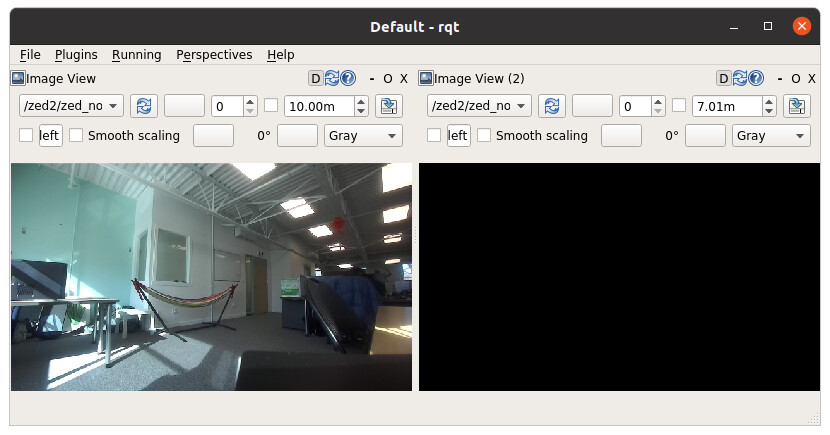
As shown in the rqt, the depth images window is all black.
I’d really appreciate it if you can take a look at this issue.