Hey, we’re running the zed-ros2-wrapper with ROS2 Humble on Jetson AGX Orin (JetPack version 6.1, SDK version 4.2).
The frame rate grab_frame_rate is the default value of 30 (confirmed with rosparam get), yet running ros2 topic hz /zed/zed_node/rgb/image_rect_color runs at barely 14Hz.
Couple more notes:
- Running ROS2 nodes are:
/zed/transform_listener_impl_ffff5c09ae30 /zed/zed_container /zed/zed_node /zed/zed_state_publisher - Resolution
grab_resolution: 'HD1080' - Turning off depth (
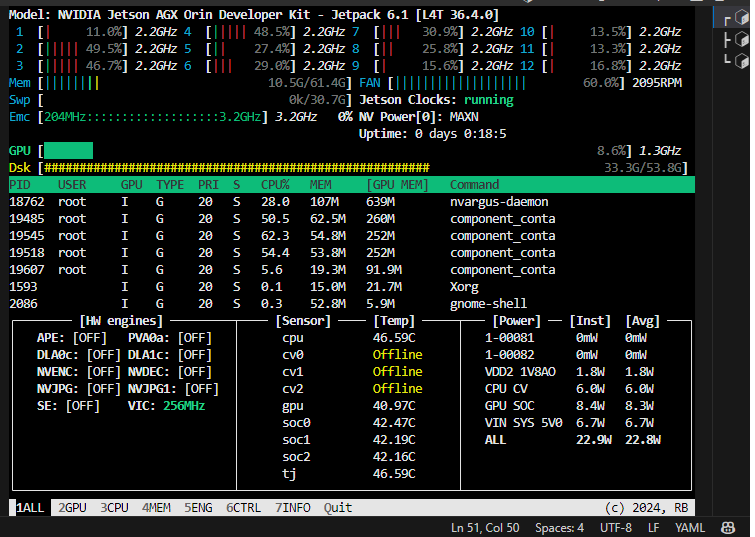
depth_mode: "NONE") doesn’t help jetson_clocksis runningjtopshows CPU ~10%, GPU 0~4%- Power mode
MAXN
ros2 topic hz /zed/zed_node/rgb/image_rect_color output:
average rate: 13.149
min: 0.067s max: 0.134s std dev: 0.02276s window: 15
average rate: 13.978
min: 0.066s max: 0.134s std dev: 0.01672s window: 30
average rate: 14.276
min: 0.066s max: 0.134s std dev: 0.01381s window: 45
average rate: 13.466
min: 0.066s max: 0.201s std dev: 0.02429s window: 56
ros2 topic bw /zed/zed_node/rgb/image_rect_color output:
133.11 MB/s from 14 messages
Message size mean: 8.29 MB min: 8.29 MB max: 8.29 MB
123.67 MB/s from 28 messages
Message size mean: 8.29 MB min: 8.29 MB max: 8.29 MB
121.30 MB/s from 42 messages
Message size mean: 8.29 MB min: 8.29 MB max: 8.29 MB
119.96 MB/s from 56 messages
Message size mean: 8.29 MB min: 8.29 MB max: 8.29 MB
jetson_clocks --show output:
SOC family:tegra234 Machine:NVIDIA Jetson AGX Orin Developer Kit
Online CPUs: 0-11
cpu0: Online=1 Governor=schedutil MinFreq=2201600 MaxFreq=2201600 CurrentFreq=2201600 IdleStates: WFI=0 c7=0
cpu1: Online=1 Governor=schedutil MinFreq=2201600 MaxFreq=2201600 CurrentFreq=2201600 IdleStates: WFI=0 c7=0
cpu2: Online=1 Governor=schedutil MinFreq=2201600 MaxFreq=2201600 CurrentFreq=2201600 IdleStates: WFI=0 c7=0
cpu3: Online=1 Governor=schedutil MinFreq=2201600 MaxFreq=2201600 CurrentFreq=2201600 IdleStates: WFI=0 c7=0
cpu4: Online=1 Governor=schedutil MinFreq=2201600 MaxFreq=2201600 CurrentFreq=2201600 IdleStates: WFI=0 c7=0
cpu5: Online=1 Governor=schedutil MinFreq=2201600 MaxFreq=2201600 CurrentFreq=2201600 IdleStates: WFI=0 c7=0
cpu6: Online=1 Governor=schedutil MinFreq=2201600 MaxFreq=2201600 CurrentFreq=2201600 IdleStates: WFI=0 c7=0
cpu7: Online=1 Governor=schedutil MinFreq=2201600 MaxFreq=2201600 CurrentFreq=2201600 IdleStates: WFI=0 c7=0
cpu8: Online=1 Governor=schedutil MinFreq=2201600 MaxFreq=2201600 CurrentFreq=2201600 IdleStates: WFI=0 c7=0
cpu9: Online=1 Governor=schedutil MinFreq=2201600 MaxFreq=2201600 CurrentFreq=2201600 IdleStates: WFI=0 c7=0
cpu10: Online=1 Governor=schedutil MinFreq=2201600 MaxFreq=2201600 CurrentFreq=2201600 IdleStates: WFI=0 c7=0
cpu11: Online=1 Governor=schedutil MinFreq=2201600 MaxFreq=2201600 CurrentFreq=2201600 IdleStates: WFI=0 c7=0
GPU MinFreq=1300500000 MaxFreq=1300500000 CurrentFreq=1300500000
Active GPU TPCs: 8
EMC MinFreq=204000000 MaxFreq=3199000000 CurrentFreq=3199000000 FreqOverride=1
DLA0_CORE: Online=1 MinFreq=0 MaxFreq=1600000000 CurrentFreq=1600000000
DLA0_FALCON: Online=1 MinFreq=0 MaxFreq=844800000 CurrentFreq=844800000
DLA1_CORE: Online=1 MinFreq=0 MaxFreq=1600000000 CurrentFreq=1600000000
DLA1_FALCON: Online=1 MinFreq=0 MaxFreq=844800000 CurrentFreq=844800000
PVA0_VPS0: Online=1 MinFreq=0 MaxFreq=1369600000 CurrentFreq=1369600000
PVA0_AXI: Online=1 MinFreq=0 MaxFreq=985600000 CurrentFreq=985600000
FAN Dynamic Speed Control=nvfancontrol hwmon0_pwm1=53
NV Power Mode: MAXN
How can we increase the frame rate?