I managed to find ZED camera’s launch file for the NVIDIA ISAAC Elbrus Library:
However, when I try to launch it, it gave the following error message:
[ERROR] [launch]: Caught exception in launch (see debug for traceback): Caught exception when trying to load file of format [py]: "package ‘zed_wrapper’ not found,
I have installed ZED ROS2 wrapper on my ubuntu 22.04 powered laptop. Do you know how to connect the ZED ROS2 wrapper to NVIDIA Docker?
Hi @PiperArrow
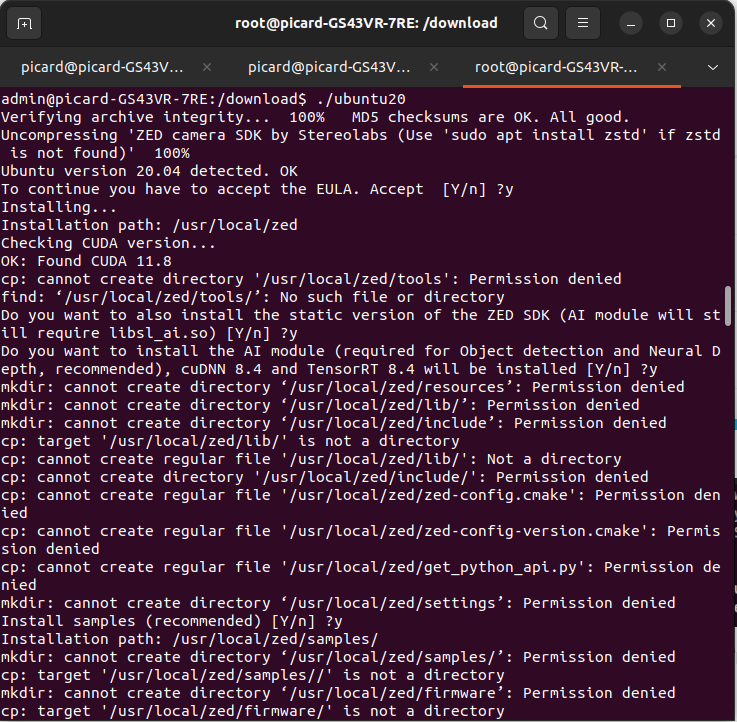
the ZED SDK must be available inside the container, so you must install it inside the Docker container even if it’s already installed in your OS.
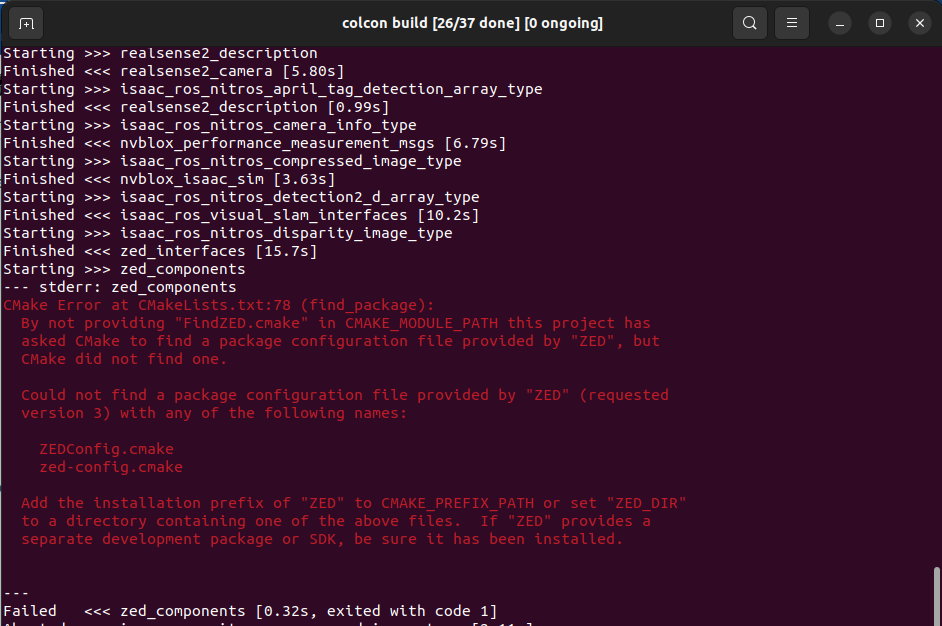
Ok, I did it. However, I don’t think it is installed within the NVIDIA Docker Container, as I still have the following error when trying to colcon build the ZED_Wrapper:
Ok, I did it, but I still cannot launch the ZED camera from NVIDIA container. However, I still cannot install the ZED Wrapper within the NVIDIA container.
I followed the instructions in this page, and placed the image_common.git and zed-ros2-wrapper.git in the same working directory as the NVIDIA VSLAM:
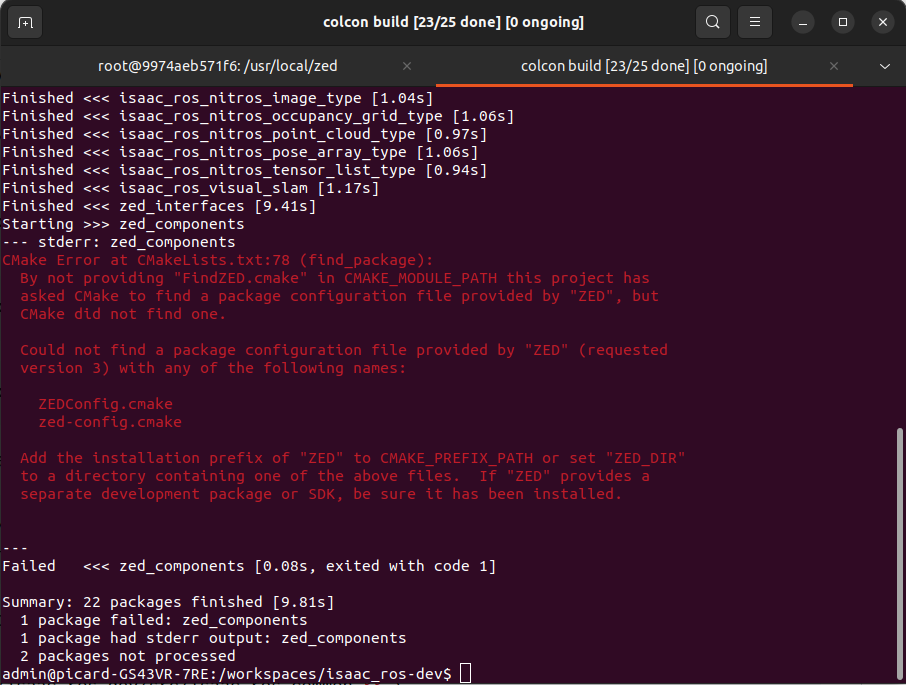
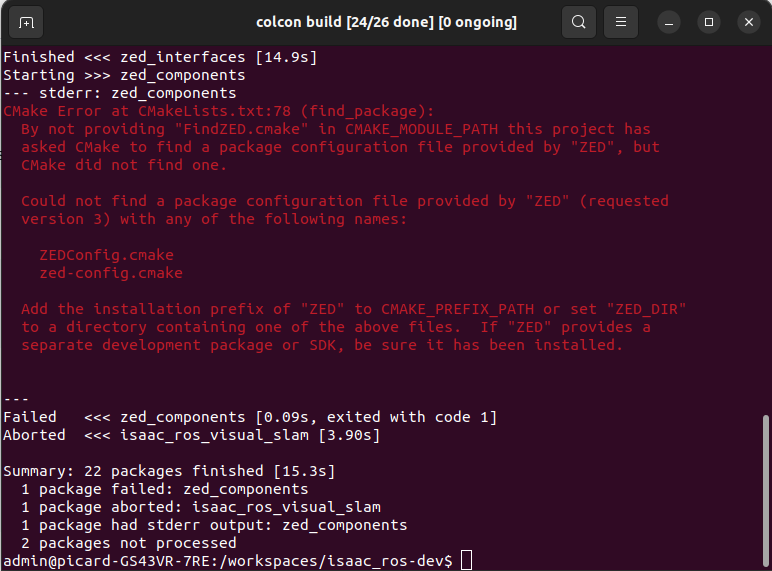
Nevertheless, I still got the error after colcon build --symlink-install --cmake-args=-DCMAKE_BUILD_TYPE=Release:
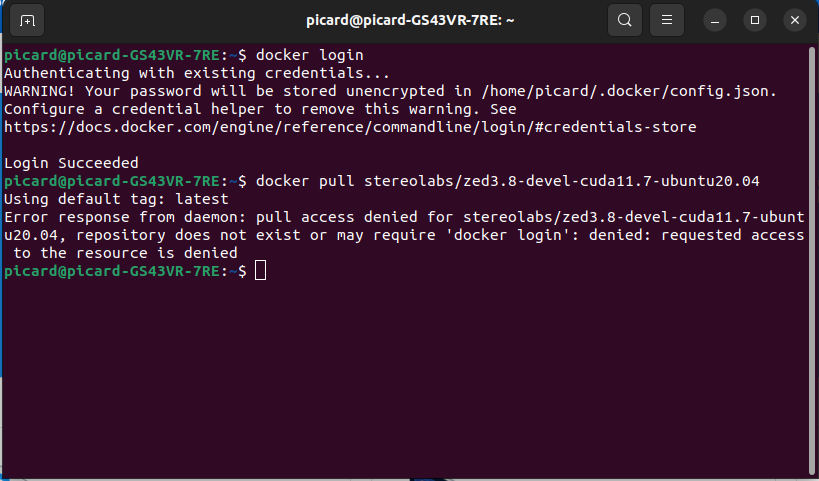
I think the docker pull stereolabs/zed:3.8-devel-cuda11.7-ubuntu20.04 did not place the ZED SDK within the NVIDIA Container. Is there any way I can use ZED M camera for NVIDIA VSLAM?
In fact, is it possible to request for a video call today or tomorrow?
Hi @PiperArrow
if the two containers can communicate using ROS, then you must set up the NVIDIA’s nodes to receive the required topics from the ZED Node.
We do not provide support for this, I guess you can find more info in the NVIDIA documentation.