What is the program you are running on the ZED ? You can tune the parameters to get a better depth : minimal distance, tolerance, etc. And of course, NEURAL depth mode is the way to go in your situation.
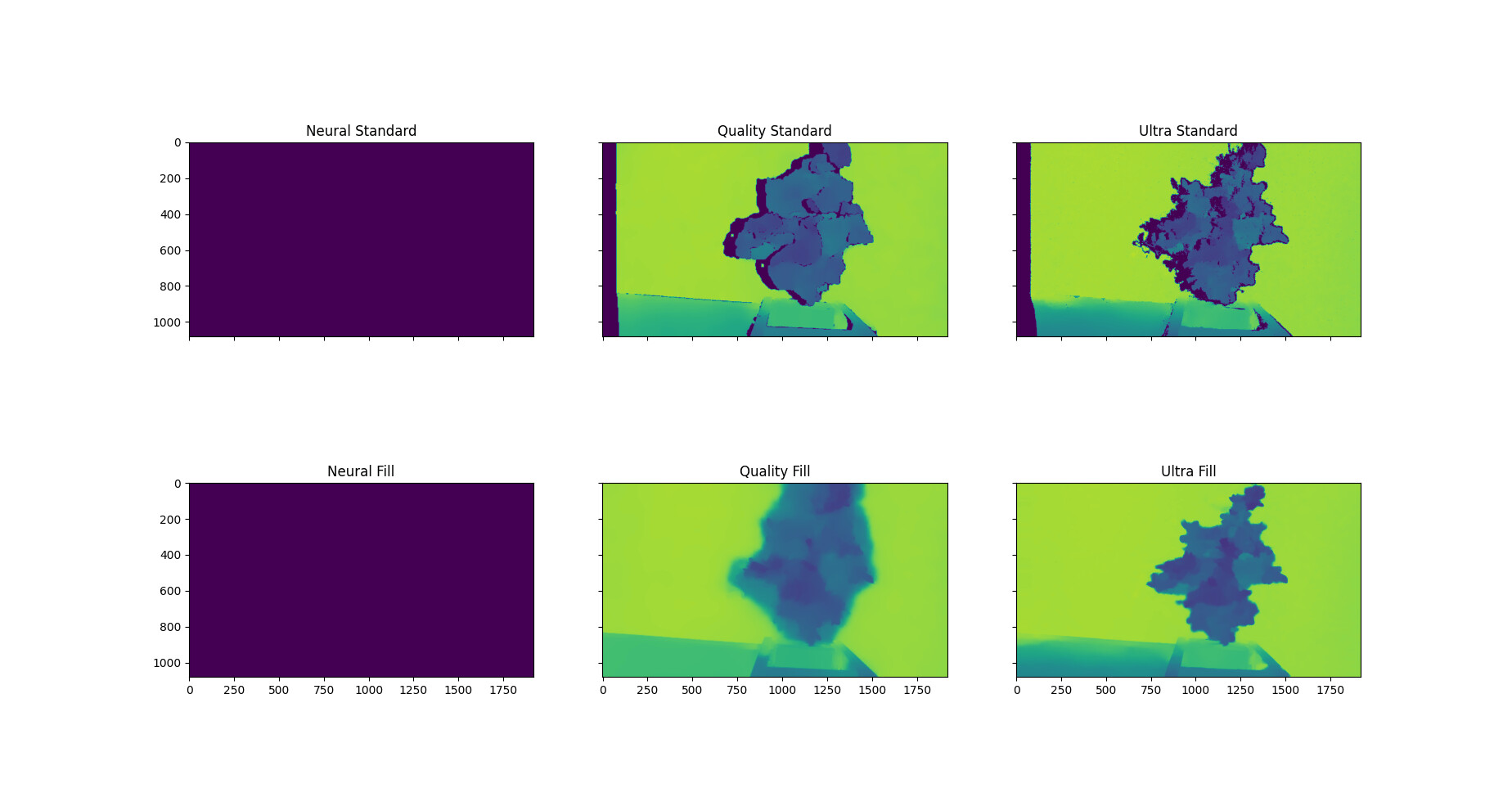
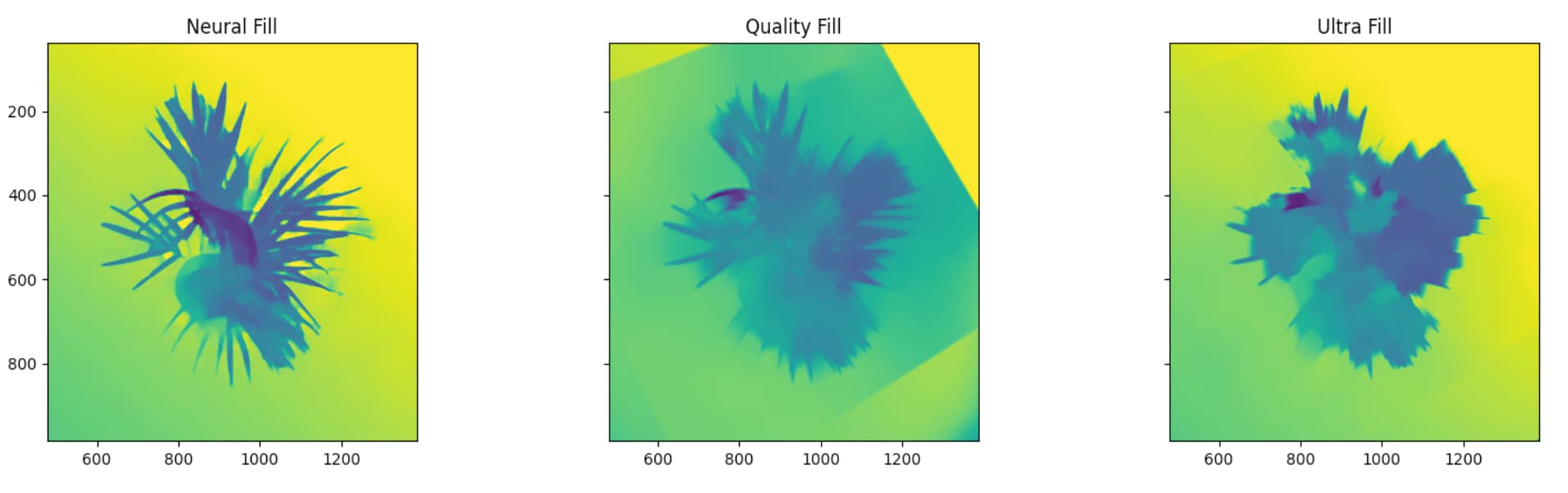
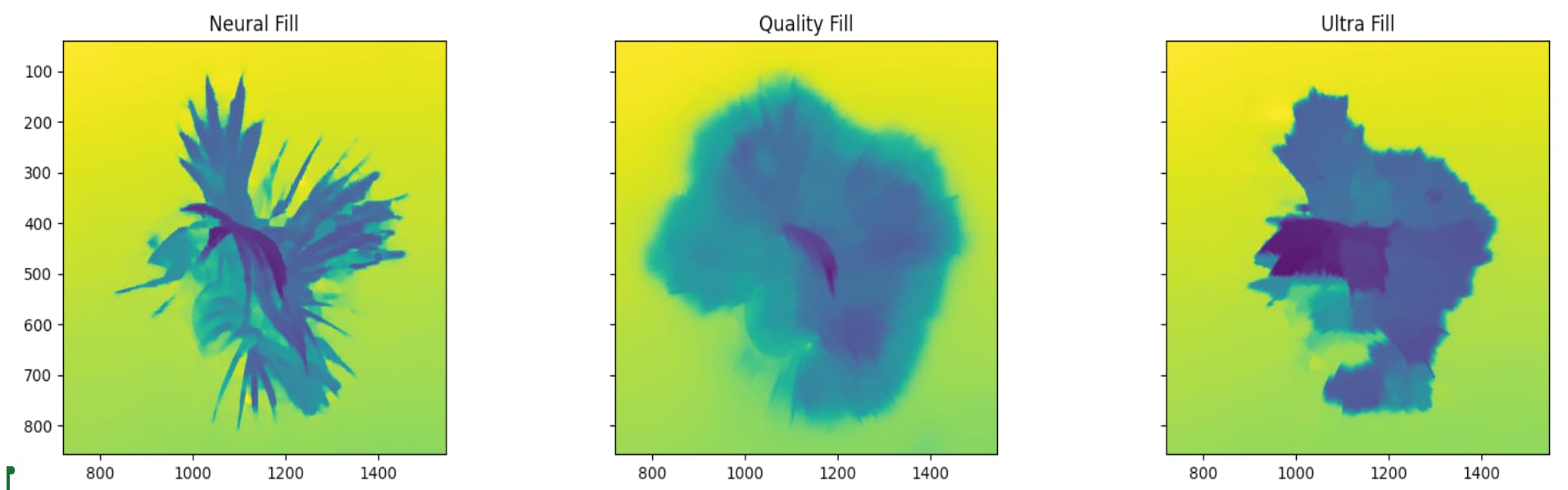
quality (not successfull because it looked like the image was blurrred and I wanted more details)
neural with no result at all because i received only NAN the the resulting matrix. (I mentionned it in this post : ZED Depth Mode Neural with Jetson Nano)
I did not set minimum and maximum distance (I only did it after acquisition using numpy clip function)
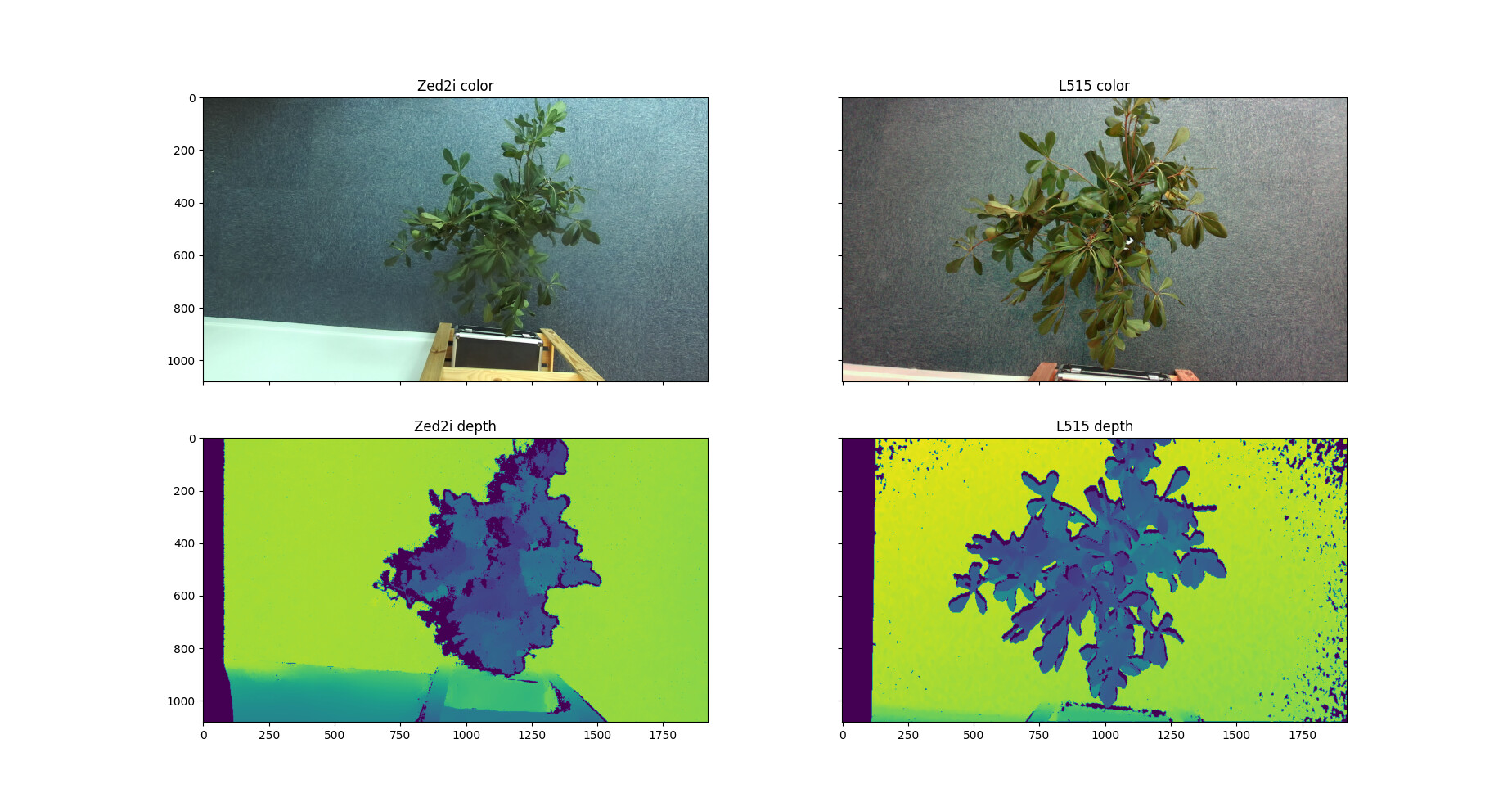
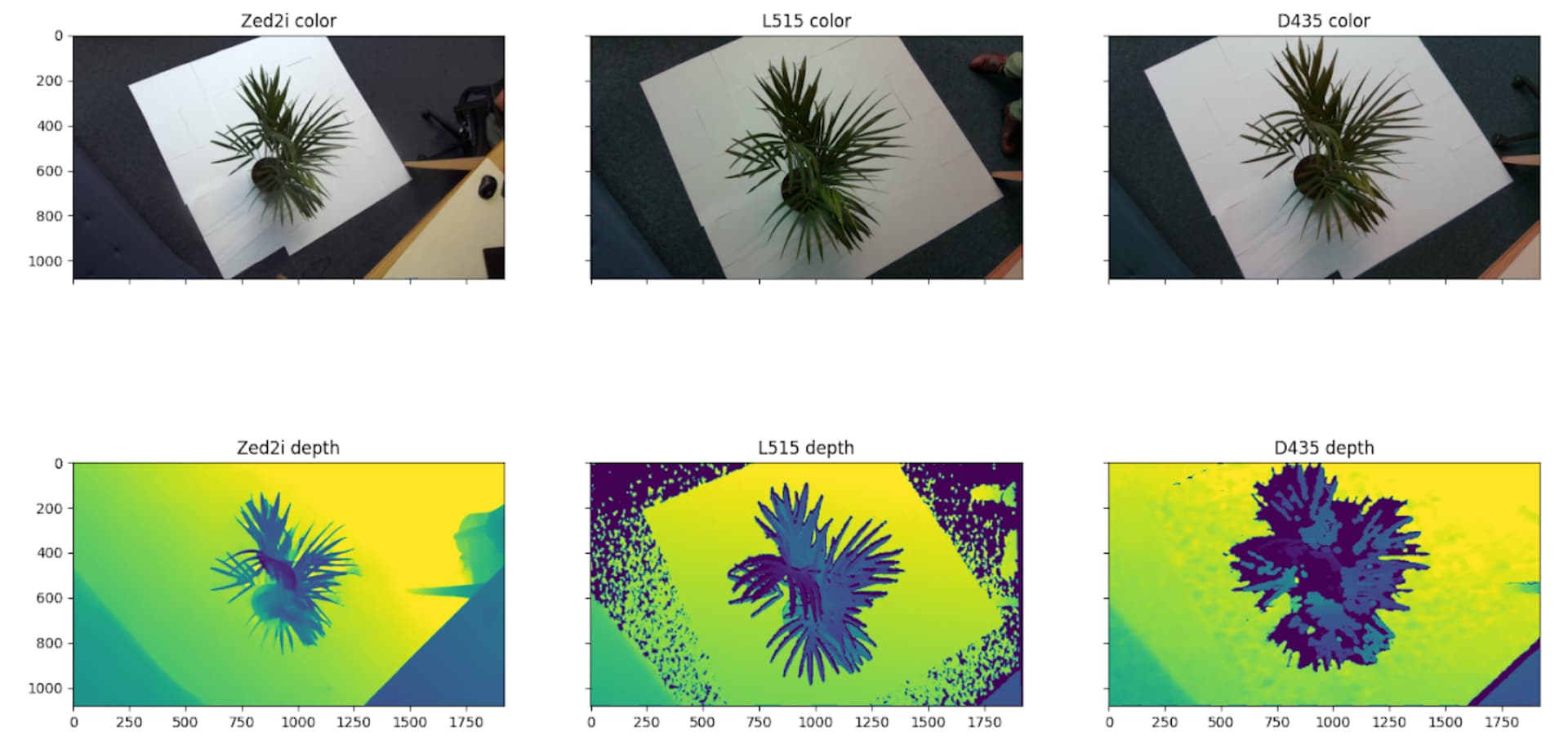
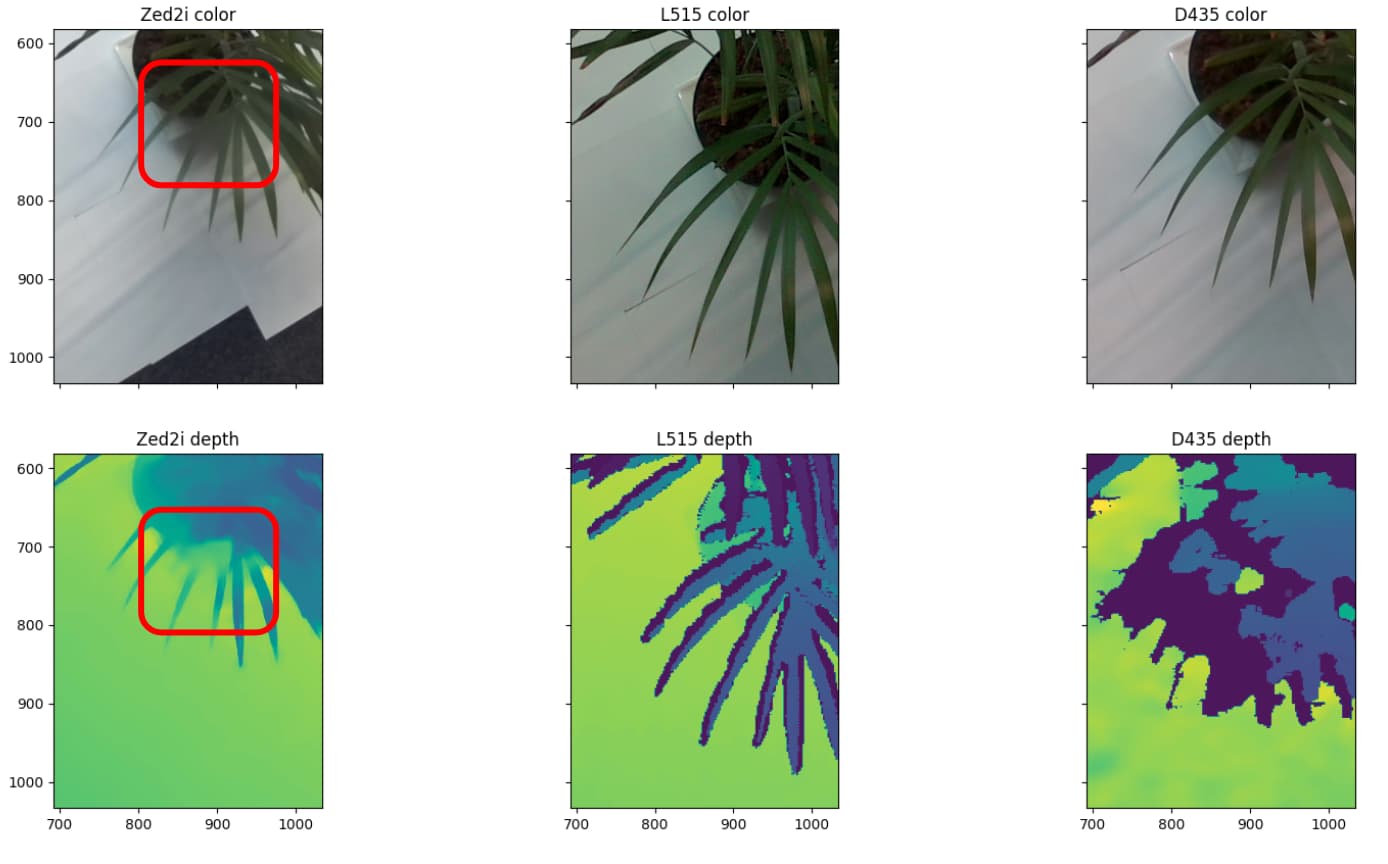
Here the images with the different mode (also tested with the standard / fill flag):
Hi @bpasserat
minimum and maximum values do not impact the quality of the depth map.
They are only thresholding filters to remove values outside the range of work of your algorithm.
For your tests, I suggest you also upgrade to ZED SDK v3.8 which add improvements to AI Depth estimation (NEURAL mode).
If you are looking for an acquisition system based on zed 2i and then integrate your own algorithms you can contact my company : arnaud@everblix.fr and boris@everblix.fr