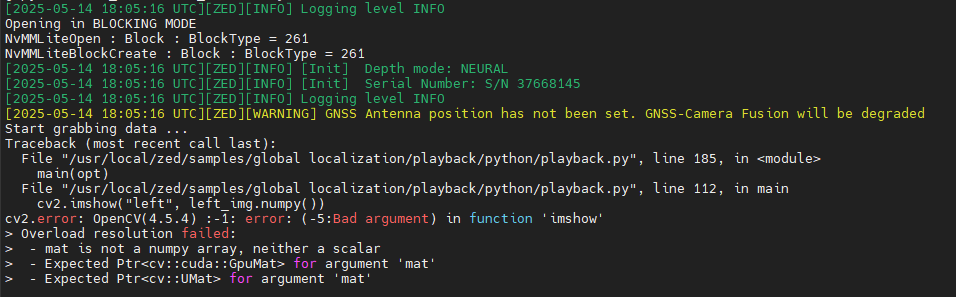
Setup: ZED 2i, Zbox Orin
Hello,
I used to have the error “GNSS DATA COVARIANCE MUST VARY” when ingesting my gnss data into the fusion, even though it was varying when looking at the data. I couldn’t solve the issue and I’ve read somwhere that it was moved from an error to a warning in the version 4.2.4 of the zed sdk.
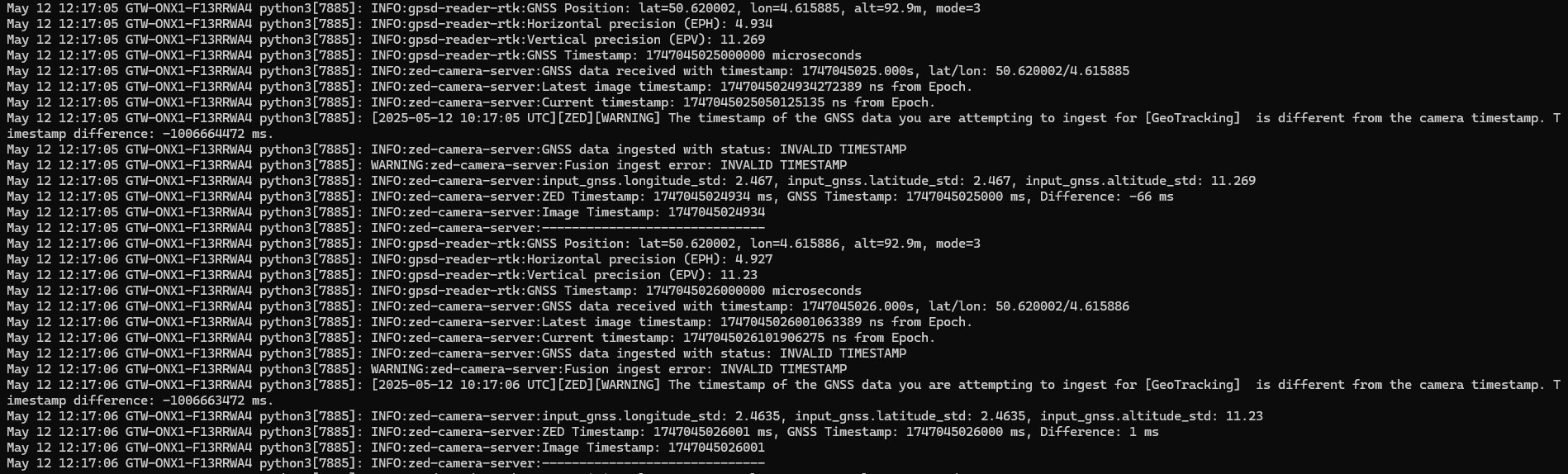
So I updated mine from v4.1.3 to 4.2.5, but now I have the error “INVALID TIMESTAMP, The timestamp of the GNSS data you are attempting to ingest for [GeoTracking] is different from the camera timestamp.”.
It says the difference is of -1494893472 ms.
As you can see, when I calculate the difference myself, it is of only 126 ms, which is good, but it seems that it gets one value from somewhere else to calculate his own difference ? What could it be ?
I’ve noticed that the difference goes from -1494894472 ms to -1494893472 ms, which is exactly one second, which corresponds to my gnss timestamp as it is updated every second. So does it not use the ZED Timestamp ? And also, it goes from -1494894472 to -1494893472, which sounds weird to me as it’s heading to 0 and not to -infinity.
Is it a problem with the OS clock not being synchronized ? I’m so lost…
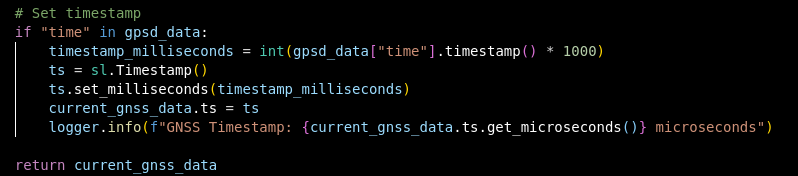
Here is how I set the GNSSData ts:
if "time" in gpsd_data:
timestamp_microseconds = int(gpsd_data["time"].timestamp() * 1000000)
ts = sl.Timestamp()
ts.set_microseconds(timestamp_microseconds)
current_gnss_data.ts = ts
And here is how I get the timestamps and log them :
if fusion is not None:
last_image_timestamp = zed_camera.get_timestamp(sl.TIME_REFERENCE.IMAGE)
current_timestamp = zed_camera.get_timestamp(sl.TIME_REFERENCE.CURRENT)
print("Latest image timestamp: ", last_image_timestamp.get_nanoseconds(), "ns from Epoch.")
print("Current timestamp: ", current_timestamp.get_nanoseconds(), "ns from Epoch.")
# Ingest GNSS data - EXACT match to recording.py
ingest_error = fusion.ingest_gnss_data(input_gnss)
logger.info(f"GNSS data ingested with status: {ingest_error}")
if ingest_error == sl.FUSION_ERROR_CODE.SUCCESS:
logger.info("✓ GNSS data ingested successfully!")
# Save GNSS data into JSON:
gnss_data_saver.addGNSSData(input_gnss)
else:
logger.warning(f"Fusion ingest error: {ingest_error}")
# Get GNSS timestamp
gnss_timestamp = input_gnss.ts.get_milliseconds() # GNSS timestamp in milliseconds
# Get ZED camera timestamp
zed_timestamp = zed_camera.get_timestamp(sl.TIME_REFERENCE.CURRENT).get_milliseconds()
# Log and compare the timestamps
print(f"ZED Timestamp: {zed_timestamp} ms, GNSS Timestamp: {gnss_timestamp} ms, Difference: {zed_timestamp - gnss_timestamp} ms")
print("Image Timestamp: ", zed_camera.get_timestamp(sl.TIME_REFERENCE.IMAGE).get_milliseconds())
print("------------------------------")
INFO:gpsd-reader-rtk:GNSS Position: lat=50.620069, lon=4.615719, alt=99.2m, mode=3
INFO:gpsd-reader-rtk:GNSS Status: 2
INFO:gpsd-reader-rtk:Horizontal precision (EPH): 10.577
INFO:gpsd-reader-rtk:Vertical precision (EPV): 18.046
INFO:zed-camera-server:GNSS data received with timestamp: 1746556795.000s, lat/lon: 50.620069/4.615719
Latest image timestamp: 1746556795007094481 ns from Epoch.
Current timestamp: 1746556795101533404 ns from Epoch.
[2025-05-06 18:39:55 UTC][ZED][WARNING] The timestamp of the GNSS data you are attempting to ingest for [GeoTracking] is different from the camera timestamp. Timestamp difference: -1494894472 ms.
INFO:zed-camera-server:GNSS data ingested with status: INVALID TIMESTAMP
WARNING:zed-camera-server:Fusion ingest error: INVALID TIMESTAMP
ZED Timestamp: 1746556795102 ms, GNSS Timestamp: 1746556795000 ms, Difference: 102 ms
Image Timestamp: 1746556795007
INFO:gpsd-reader-rtk:GNSS Position: lat=50.620069, lon=4.615722, alt=99.0m, mode=3
INFO:gpsd-reader-rtk:GNSS Status: 2
INFO:gpsd-reader-rtk:Horizontal precision (EPH): 10.112
INFO:gpsd-reader-rtk:Vertical precision (EPV): 17.207
INFO:zed-camera-server:GNSS data received with timestamp: 1746556796.000s, lat/lon: 50.620069/4.615722
Latest image timestamp: 1746556796040503481 ns from Epoch.
Current timestamp: 1746556796125982301 ns from Epoch.
[2025-05-06 18:39:56 UTC][ZED][WARNING] The timestamp of the GNSS data you are attempting to ingest for [GeoTracking] is different from the camera timestamp. Timestamp difference: -1494893472 ms.
INFO:zed-camera-server:GNSS data ingested with status: INVALID TIMESTAMP
WARNING:zed-camera-server:Fusion ingest error: INVALID TIMESTAMP
ZED Timestamp: 1746556796126 ms, GNSS Timestamp: 1746556796000 ms, Difference: 126 ms
Image Timestamp: 1746556796040