Sorry for my late response, I didn’t have access to my zed workstation.
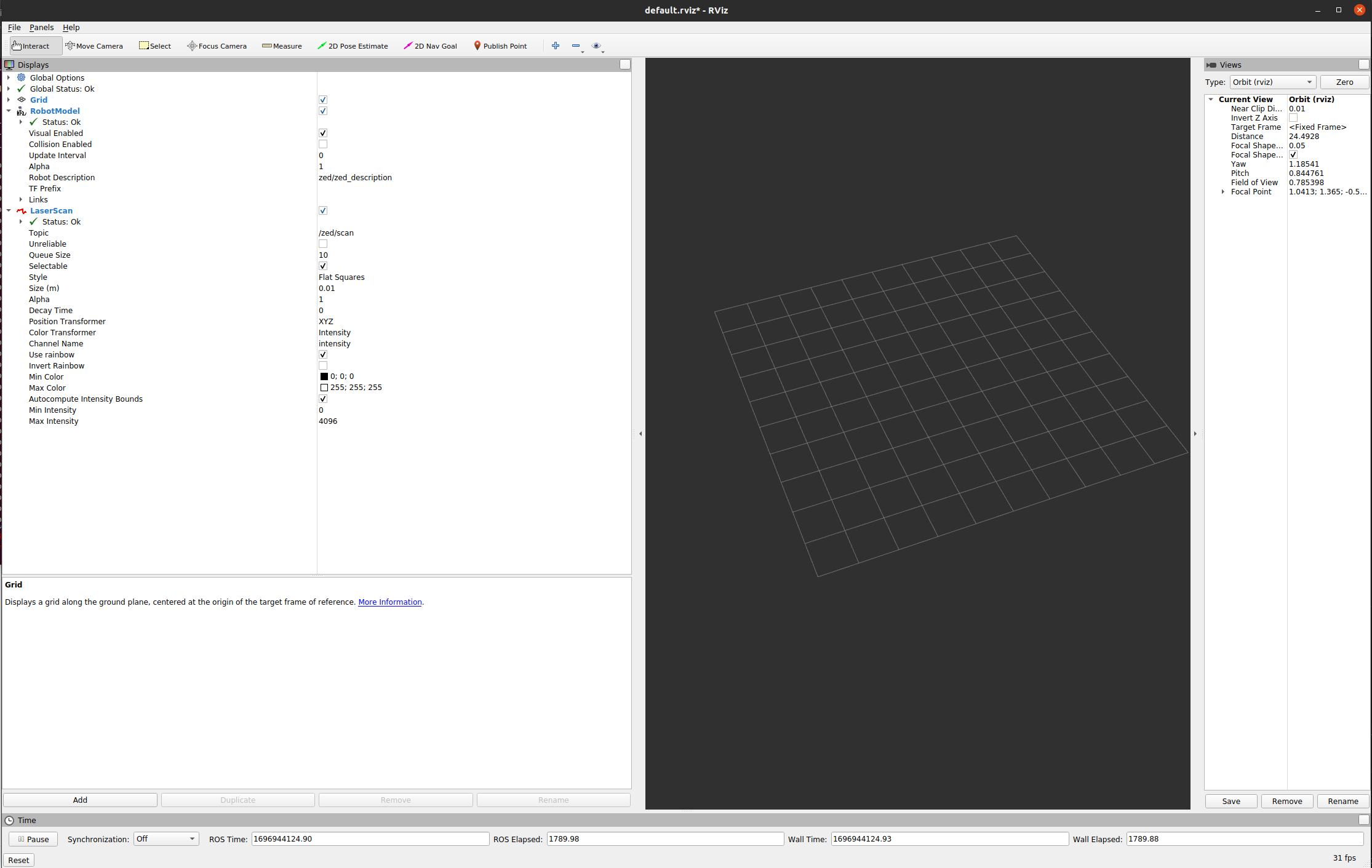
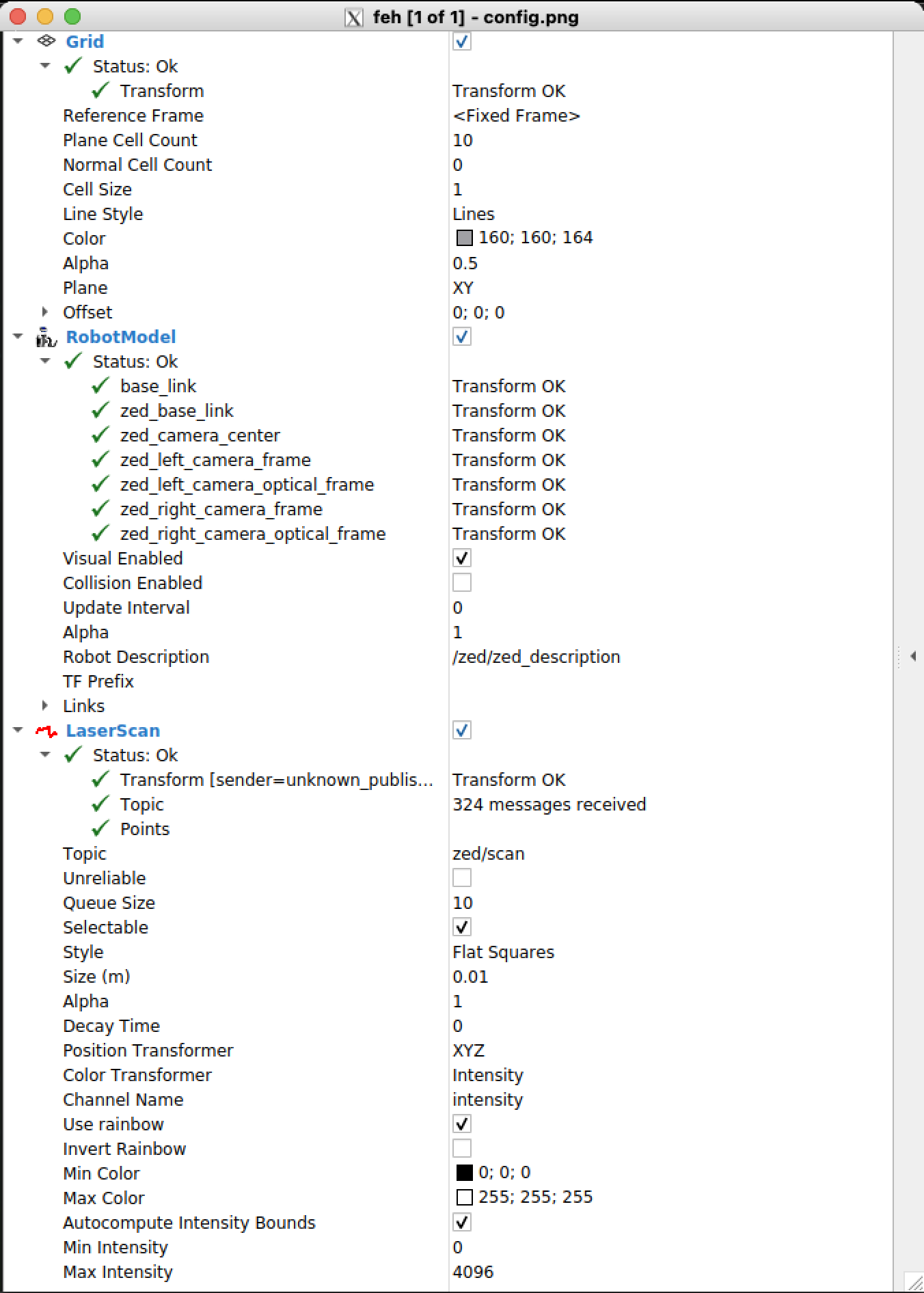
Also “Robot Description” should match the correct available parameter name.
I tried to change /zed/zed_description to for example /zed/zed_nodelet/depth/depth_registered but the error occurs “parameter does not exist”, but I see this topic in my topics list.
It’s my full rviz configuration.
And also full list of my topics:
- full list of my topics:
/clicked_point
/diagnostics
/initialpose
/move_base_simple/goal
/rosout
/rosout_agg
/tf
/tf_static
/zed/depthimage_to_laserscan/parameter_descriptions
/zed/depthimage_to_laserscan/parameter_updates
/zed/joint_states
/zed/scan
/zed/zed_nodelet/atm_press
/zed/zed_nodelet/confidence/confidence_map
/zed/zed_nodelet/depth/camera_info
/zed/zed_nodelet/depth/depth_registered
/zed/zed_nodelet/depth/depth_registered/compressed
/zed/zed_nodelet/depth/depth_registered/compressed/parameter_descriptions
/zed/zed_nodelet/depth/depth_registered/compressed/parameter_updates
/zed/zed_nodelet/depth/depth_registered/compressedDepth
/zed/zed_nodelet/depth/depth_registered/compressedDepth/parameter_descriptions
/zed/zed_nodelet/depth/depth_registered/compressedDepth/parameter_updates
/zed/zed_nodelet/depth/depth_registered/theora
/zed/zed_nodelet/depth/depth_registered/theora/parameter_descriptions
/zed/zed_nodelet/depth/depth_registered/theora/parameter_updates
/zed/zed_nodelet/disparity/disparity_image
/zed/zed_nodelet/imu/data
/zed/zed_nodelet/imu/data_raw
/zed/zed_nodelet/imu/mag
/zed/zed_nodelet/left/camera_info
/zed/zed_nodelet/left/image_rect_color
/zed/zed_nodelet/left/image_rect_color/compressed
/zed/zed_nodelet/left/image_rect_color/compressed/parameter_descriptions
/zed/zed_nodelet/left/image_rect_color/compressed/parameter_updates
/zed/zed_nodelet/left/image_rect_color/compressedDepth
/zed/zed_nodelet/left/image_rect_color/compressedDepth/parameter_descriptions
/zed/zed_nodelet/left/image_rect_color/compressedDepth/parameter_updates
/zed/zed_nodelet/left/image_rect_color/theora
/zed/zed_nodelet/left/image_rect_color/theora/parameter_descriptions
/zed/zed_nodelet/left/image_rect_color/theora/parameter_updates
/zed/zed_nodelet/left/image_rect_gray
/zed/zed_nodelet/left/image_rect_gray/compressed
/zed/zed_nodelet/left/image_rect_gray/compressed/parameter_descriptions
/zed/zed_nodelet/left/image_rect_gray/compressed/parameter_updates
/zed/zed_nodelet/left/image_rect_gray/compressedDepth
/zed/zed_nodelet/left/image_rect_gray/compressedDepth/parameter_descriptions
/zed/zed_nodelet/left/image_rect_gray/compressedDepth/parameter_updates
/zed/zed_nodelet/left/image_rect_gray/theora
/zed/zed_nodelet/left/image_rect_gray/theora/parameter_descriptions
/zed/zed_nodelet/left/image_rect_gray/theora/parameter_updates
/zed/zed_nodelet/left_cam_imu_transform
/zed/zed_nodelet/left_raw/camera_info
/zed/zed_nodelet/left_raw/image_raw_color
/zed/zed_nodelet/left_raw/image_raw_color/compressed
/zed/zed_nodelet/left_raw/image_raw_color/compressed/parameter_descriptions
/zed/zed_nodelet/left_raw/image_raw_color/compressed/parameter_updates
/zed/zed_nodelet/left_raw/image_raw_color/compressedDepth
/zed/zed_nodelet/left_raw/image_raw_color/compressedDepth/parameter_descriptions
/zed/zed_nodelet/left_raw/image_raw_color/compressedDepth/parameter_updates
/zed/zed_nodelet/left_raw/image_raw_color/theora
/zed/zed_nodelet/left_raw/image_raw_color/theora/parameter_descriptions
/zed/zed_nodelet/left_raw/image_raw_color/theora/parameter_updates
/zed/zed_nodelet/left_raw/image_raw_gray
/zed/zed_nodelet/left_raw/image_raw_gray/compressed
/zed/zed_nodelet/left_raw/image_raw_gray/compressed/parameter_descriptions
/zed/zed_nodelet/left_raw/image_raw_gray/compressed/parameter_updates
/zed/zed_nodelet/left_raw/image_raw_gray/compressedDepth
/zed/zed_nodelet/left_raw/image_raw_gray/compressedDepth/parameter_descriptions
/zed/zed_nodelet/left_raw/image_raw_gray/compressedDepth/parameter_updates
/zed/zed_nodelet/left_raw/image_raw_gray/theora
/zed/zed_nodelet/left_raw/image_raw_gray/theora/parameter_descriptions
/zed/zed_nodelet/left_raw/image_raw_gray/theora/parameter_updates
/zed/zed_nodelet/mapping/fused_cloud
/zed/zed_nodelet/obj_det/objects
/zed/zed_nodelet/odom
/zed/zed_nodelet/odom/status
/zed/zed_nodelet/path_map
/zed/zed_nodelet/path_odom
/zed/zed_nodelet/plane
/zed/zed_nodelet/plane_marker
/zed/zed_nodelet/point_cloud/cloud_registered
/zed/zed_nodelet/pose
/zed/zed_nodelet/pose/status
/zed/zed_nodelet/pose_with_covariance
/zed/zed_nodelet/rgb/camera_info
/zed/zed_nodelet/rgb/image_rect_color
/zed/zed_nodelet/rgb/image_rect_color/compressed
/zed/zed_nodelet/rgb/image_rect_color/compressed/parameter_descriptions
/zed/zed_nodelet/rgb/image_rect_color/compressed/parameter_updates
/zed/zed_nodelet/rgb/image_rect_color/compressedDepth
/zed/zed_nodelet/rgb/image_rect_color/compressedDepth/parameter_descriptions
/zed/zed_nodelet/rgb/image_rect_color/compressedDepth/parameter_updates
/zed/zed_nodelet/rgb/image_rect_color/theora
/zed/zed_nodelet/rgb/image_rect_color/theora/parameter_descriptions
/zed/zed_nodelet/rgb/image_rect_color/theora/parameter_updates
/zed/zed_nodelet/rgb/image_rect_gray
/zed/zed_nodelet/rgb/image_rect_gray/compressed
/zed/zed_nodelet/rgb/image_rect_gray/compressed/parameter_descriptions
/zed/zed_nodelet/rgb/image_rect_gray/compressed/parameter_updates
/zed/zed_nodelet/rgb/image_rect_gray/compressedDepth
/zed/zed_nodelet/rgb/image_rect_gray/compressedDepth/parameter_descriptions
/zed/zed_nodelet/rgb/image_rect_gray/compressedDepth/parameter_updates
/zed/zed_nodelet/rgb/image_rect_gray/theora
/zed/zed_nodelet/rgb/image_rect_gray/theora/parameter_descriptions
/zed/zed_nodelet/rgb/image_rect_gray/theora/parameter_updates
/zed/zed_nodelet/rgb_raw/camera_info
/zed/zed_nodelet/rgb_raw/image_raw_color
/zed/zed_nodelet/rgb_raw/image_raw_color/compressed
/zed/zed_nodelet/rgb_raw/image_raw_color/compressed/parameter_descriptions
/zed/zed_nodelet/rgb_raw/image_raw_color/compressed/parameter_updates
/zed/zed_nodelet/rgb_raw/image_raw_color/compressedDepth
/zed/zed_nodelet/rgb_raw/image_raw_color/compressedDepth/parameter_descriptions
/zed/zed_nodelet/rgb_raw/image_raw_color/compressedDepth/parameter_updates
/zed/zed_nodelet/rgb_raw/image_raw_color/theora
/zed/zed_nodelet/rgb_raw/image_raw_color/theora/parameter_descriptions
/zed/zed_nodelet/rgb_raw/image_raw_color/theora/parameter_updates
/zed/zed_nodelet/rgb_raw/image_raw_gray
/zed/zed_nodelet/rgb_raw/image_raw_gray/compressed
/zed/zed_nodelet/rgb_raw/image_raw_gray/compressed/parameter_descriptions
/zed/zed_nodelet/rgb_raw/image_raw_gray/compressed/parameter_updates
/zed/zed_nodelet/rgb_raw/image_raw_gray/compressedDepth
/zed/zed_nodelet/rgb_raw/image_raw_gray/compressedDepth/parameter_descriptions
/zed/zed_nodelet/rgb_raw/image_raw_gray/compressedDepth/parameter_updates
/zed/zed_nodelet/rgb_raw/image_raw_gray/theora
/zed/zed_nodelet/rgb_raw/image_raw_gray/theora/parameter_descriptions
/zed/zed_nodelet/rgb_raw/image_raw_gray/theora/parameter_updates
/zed/zed_nodelet/right/camera_info
/zed/zed_nodelet/right/image_rect_color
/zed/zed_nodelet/right/image_rect_color/compressed
/zed/zed_nodelet/right/image_rect_color/compressed/parameter_descriptions
/zed/zed_nodelet/right/image_rect_color/compressed/parameter_updates
/zed/zed_nodelet/right/image_rect_color/compressedDepth
/zed/zed_nodelet/right/image_rect_color/compressedDepth/parameter_descriptions
/zed/zed_nodelet/right/image_rect_color/compressedDepth/parameter_updates
/zed/zed_nodelet/right/image_rect_color/theora
/zed/zed_nodelet/right/image_rect_color/theora/parameter_descriptions
/zed/zed_nodelet/right/image_rect_color/theora/parameter_updates
/zed/zed_nodelet/right/image_rect_gray
/zed/zed_nodelet/right/image_rect_gray/compressed
/zed/zed_nodelet/right/image_rect_gray/compressed/parameter_descriptions
/zed/zed_nodelet/right/image_rect_gray/compressed/parameter_updates
/zed/zed_nodelet/right/image_rect_gray/compressedDepth
/zed/zed_nodelet/right/image_rect_gray/compressedDepth/parameter_descriptions
/zed/zed_nodelet/right/image_rect_gray/compressedDepth/parameter_updates
/zed/zed_nodelet/right/image_rect_gray/theora
/zed/zed_nodelet/right/image_rect_gray/theora/parameter_descriptions
/zed/zed_nodelet/right/image_rect_gray/theora/parameter_updates
/zed/zed_nodelet/right_raw/camera_info
/zed/zed_nodelet/right_raw/image_raw_color
/zed/zed_nodelet/right_raw/image_raw_color/compressed
/zed/zed_nodelet/right_raw/image_raw_color/compressed/parameter_descriptions
/zed/zed_nodelet/right_raw/image_raw_color/compressed/parameter_updates
/zed/zed_nodelet/right_raw/image_raw_color/compressedDepth
/zed/zed_nodelet/right_raw/image_raw_color/compressedDepth/parameter_descriptions
/zed/zed_nodelet/right_raw/image_raw_color/compressedDepth/parameter_updates
/zed/zed_nodelet/right_raw/image_raw_color/theora
/zed/zed_nodelet/right_raw/image_raw_color/theora/parameter_descriptions
/zed/zed_nodelet/right_raw/image_raw_color/theora/parameter_updates
/zed/zed_nodelet/right_raw/image_raw_gray
/zed/zed_nodelet/right_raw/image_raw_gray/compressed
/zed/zed_nodelet/right_raw/image_raw_gray/compressed/parameter_descriptions
/zed/zed_nodelet/right_raw/image_raw_gray/compressed/parameter_updates
/zed/zed_nodelet/right_raw/image_raw_gray/compressedDepth
/zed/zed_nodelet/right_raw/image_raw_gray/compressedDepth/parameter_descriptions
/zed/zed_nodelet/right_raw/image_raw_gray/compressedDepth/parameter_updates
/zed/zed_nodelet/right_raw/image_raw_gray/theora
/zed/zed_nodelet/right_raw/image_raw_gray/theora/parameter_descriptions
/zed/zed_nodelet/right_raw/image_raw_gray/theora/parameter_updates
/zed/zed_nodelet/stereo/image_rect_color
/zed/zed_nodelet/stereo/image_rect_color/compressed
/zed/zed_nodelet/stereo/image_rect_color/compressed/parameter_descriptions
/zed/zed_nodelet/stereo/image_rect_color/compressed/parameter_updates
/zed/zed_nodelet/stereo/image_rect_color/compressedDepth
/zed/zed_nodelet/stereo/image_rect_color/compressedDepth/parameter_descriptions
/zed/zed_nodelet/stereo/image_rect_color/compressedDepth/parameter_updates
/zed/zed_nodelet/stereo/image_rect_color/theora
/zed/zed_nodelet/stereo/image_rect_color/theora/parameter_descriptions
/zed/zed_nodelet/stereo/image_rect_color/theora/parameter_updates
/zed/zed_nodelet/stereo_raw/image_raw_color
/zed/zed_nodelet/stereo_raw/image_raw_color/compressed
/zed/zed_nodelet/stereo_raw/image_raw_color/compressed/parameter_descriptions
/zed/zed_nodelet/stereo_raw/image_raw_color/compressed/parameter_updates
/zed/zed_nodelet/stereo_raw/image_raw_color/compressedDepth
/zed/zed_nodelet/stereo_raw/image_raw_color/compressedDepth/parameter_descriptions
/zed/zed_nodelet/stereo_raw/image_raw_color/compressedDepth/parameter_updates
/zed/zed_nodelet/stereo_raw/image_raw_color/theora
/zed/zed_nodelet/stereo_raw/image_raw_color/theora/parameter_descriptions
/zed/zed_nodelet/stereo_raw/image_raw_color/theora/parameter_updates
/zed/zed_nodelet/temperature/imu
/zed/zed_nodelet/temperature/left
/zed/zed_nodelet/temperature/right
/zed/zed_nodelet_manager/bond
/zed/zed_nodelet_manager/parameter_descriptions
/zed/zed_nodelet_manager/parameter_updates
/zed2i/zed_node/depth/depth_registered
/zed2i/zed_node/depth/depth_registered/compressedDepth
/zed2i/zed_node/left/camera_info
/zed2i/zed_node/obj_det/objects /clicked_point
/diagnostics
/initialpose
/move_base_simple/goal
/rosout
/rosout_agg
/tf
/tf_static
/zed/depthimage_to_laserscan/parameter_descriptions
/zed/depthimage_to_laserscan/parameter_updates
/zed/joint_states
/zed/scan
/zed/zed_nodelet/atm_press
/zed/zed_nodelet/confidence/confidence_map
/zed/zed_nodelet/depth/camera_info
/zed/zed_nodelet/depth/depth_registered
/zed/zed_nodelet/depth/depth_registered/compressed
/zed/zed_nodelet/depth/depth_registered/compressed/parameter_descriptions
/zed/zed_nodelet/depth/depth_registered/compressed/parameter_updates
/zed/zed_nodelet/depth/depth_registered/compressedDepth
/zed/zed_nodelet/depth/depth_registered/compressedDepth/parameter_descriptions
/zed/zed_nodelet/depth/depth_registered/compressedDepth/parameter_updates
/zed/zed_nodelet/depth/depth_registered/theora
/zed/zed_nodelet/depth/depth_registered/theora/parameter_descriptions
/zed/zed_nodelet/depth/depth_registered/theora/parameter_updates
/zed/zed_nodelet/disparity/disparity_image
/zed/zed_nodelet/imu/data
/zed/zed_nodelet/imu/data_raw
/zed/zed_nodelet/imu/mag
/zed/zed_nodelet/left/camera_info
/zed/zed_nodelet/left/image_rect_color
/zed/zed_nodelet/left/image_rect_color/compressed
/zed/zed_nodelet/left/image_rect_color/compressed/parameter_descriptions
/zed/zed_nodelet/left/image_rect_color/compressed/parameter_updates
/zed/zed_nodelet/left/image_rect_color/compressedDepth
/zed/zed_nodelet/left/image_rect_color/compressedDepth/parameter_descriptions
/zed/zed_nodelet/left/image_rect_color/compressedDepth/parameter_updates
/zed/zed_nodelet/left/image_rect_color/theora
/zed/zed_nodelet/left/image_rect_color/theora/parameter_descriptions
/zed/zed_nodelet/left/image_rect_color/theora/parameter_updates
/zed/zed_nodelet/left/image_rect_gray
/zed/zed_nodelet/left/image_rect_gray/compressed
/zed/zed_nodelet/left/image_rect_gray/compressed/parameter_descriptions
/zed/zed_nodelet/left/image_rect_gray/compressed/parameter_updates
/zed/zed_nodelet/left/image_rect_gray/compressedDepth
/zed/zed_nodelet/left/image_rect_gray/compressedDepth/parameter_descriptions
/zed/zed_nodelet/left/image_rect_gray/compressedDepth/parameter_updates
/zed/zed_nodelet/left/image_rect_gray/theora
/zed/zed_nodelet/left/image_rect_gray/theora/parameter_descriptions
/zed/zed_nodelet/left/image_rect_gray/theora/parameter_updates
/zed/zed_nodelet/left_cam_imu_transform
/zed/zed_nodelet/left_raw/camera_info
/zed/zed_nodelet/left_raw/image_raw_color
/zed/zed_nodelet/left_raw/image_raw_color/compressed
/zed/zed_nodelet/left_raw/image_raw_color/compressed/parameter_descriptions
/zed/zed_nodelet/left_raw/image_raw_color/compressed/parameter_updates
/zed/zed_nodelet/left_raw/image_raw_color/compressedDepth
/zed/zed_nodelet/left_raw/image_raw_color/compressedDepth/parameter_descriptions
/zed/zed_nodelet/left_raw/image_raw_color/compressedDepth/parameter_updates
/zed/zed_nodelet/left_raw/image_raw_color/theora
/zed/zed_nodelet/left_raw/image_raw_color/theora/parameter_descriptions
/zed/zed_nodelet/left_raw/image_raw_color/theora/parameter_updates
/zed/zed_nodelet/left_raw/image_raw_gray
/zed/zed_nodelet/left_raw/image_raw_gray/compressed
/zed/zed_nodelet/left_raw/image_raw_gray/compressed/parameter_descriptions
/zed/zed_nodelet/left_raw/image_raw_gray/compressed/parameter_updates
/zed/zed_nodelet/left_raw/image_raw_gray/compressedDepth
/zed/zed_nodelet/left_raw/image_raw_gray/compressedDepth/parameter_descriptions
/zed/zed_nodelet/left_raw/image_raw_gray/compressedDepth/parameter_updates
/zed/zed_nodelet/left_raw/image_raw_gray/theora
/zed/zed_nodelet/left_raw/image_raw_gray/theora/parameter_descriptions
/zed/zed_nodelet/left_raw/image_raw_gray/theora/parameter_updates
/zed/zed_nodelet/mapping/fused_cloud
/zed/zed_nodelet/obj_det/objects
/zed/zed_nodelet/odom
/zed/zed_nodelet/odom/status
/zed/zed_nodelet/path_map
/zed/zed_nodelet/path_odom
/zed/zed_nodelet/plane
/zed/zed_nodelet/plane_marker
/zed/zed_nodelet/point_cloud/cloud_registered
/zed/zed_nodelet/pose
/zed/zed_nodelet/pose/status
/zed/zed_nodelet/pose_with_covariance
/zed/zed_nodelet/rgb/camera_info
/zed/zed_nodelet/rgb/image_rect_color
/zed/zed_nodelet/rgb/image_rect_color/compressed
/zed/zed_nodelet/rgb/image_rect_color/compressed/parameter_descriptions
/zed/zed_nodelet/rgb/image_rect_color/compressed/parameter_updates
/zed/zed_nodelet/rgb/image_rect_color/compressedDepth
/zed/zed_nodelet/rgb/image_rect_color/compressedDepth/parameter_descriptions
/zed/zed_nodelet/rgb/image_rect_color/compressedDepth/parameter_updates
/zed/zed_nodelet/rgb/image_rect_color/theora
/zed/zed_nodelet/rgb/image_rect_color/theora/parameter_descriptions
/zed/zed_nodelet/rgb/image_rect_color/theora/parameter_updates
/zed/zed_nodelet/rgb/image_rect_gray
/zed/zed_nodelet/rgb/image_rect_gray/compressed
/zed/zed_nodelet/rgb/image_rect_gray/compressed/parameter_descriptions
/zed/zed_nodelet/rgb/image_rect_gray/compressed/parameter_updates
/zed/zed_nodelet/rgb/image_rect_gray/compressedDepth
/zed/zed_nodelet/rgb/image_rect_gray/compressedDepth/parameter_descriptions
/zed/zed_nodelet/rgb/image_rect_gray/compressedDepth/parameter_updates
/zed/zed_nodelet/rgb/image_rect_gray/theora
/zed/zed_nodelet/rgb/image_rect_gray/theora/parameter_descriptions
/zed/zed_nodelet/rgb/image_rect_gray/theora/parameter_updates
/zed/zed_nodelet/rgb_raw/camera_info
/zed/zed_nodelet/rgb_raw/image_raw_color
/zed/zed_nodelet/rgb_raw/image_raw_color/compressed
/zed/zed_nodelet/rgb_raw/image_raw_color/compressed/parameter_descriptions
/zed/zed_nodelet/rgb_raw/image_raw_color/compressed/parameter_updates
/zed/zed_nodelet/rgb_raw/image_raw_color/compressedDepth
/zed/zed_nodelet/rgb_raw/image_raw_color/compressedDepth/parameter_descriptions
/zed/zed_nodelet/rgb_raw/image_raw_color/compressedDepth/parameter_updates
/zed/zed_nodelet/rgb_raw/image_raw_color/theora
/zed/zed_nodelet/rgb_raw/image_raw_color/theora/parameter_descriptions
/zed/zed_nodelet/rgb_raw/image_raw_color/theora/parameter_updates
/zed/zed_nodelet/rgb_raw/image_raw_gray
/zed/zed_nodelet/rgb_raw/image_raw_gray/compressed
/zed/zed_nodelet/rgb_raw/image_raw_gray/compressed/parameter_descriptions
/zed/zed_nodelet/rgb_raw/image_raw_gray/compressed/parameter_updates
/zed/zed_nodelet/rgb_raw/image_raw_gray/compressedDepth
/zed/zed_nodelet/rgb_raw/image_raw_gray/compressedDepth/parameter_descriptions
/zed/zed_nodelet/rgb_raw/image_raw_gray/compressedDepth/parameter_updates
/zed/zed_nodelet/rgb_raw/image_raw_gray/theora
/zed/zed_nodelet/rgb_raw/image_raw_gray/theora/parameter_descriptions
/zed/zed_nodelet/rgb_raw/image_raw_gray/theora/parameter_updates
/zed/zed_nodelet/right/camera_info
/zed/zed_nodelet/right/image_rect_color
/zed/zed_nodelet/right/image_rect_color/compressed
/zed/zed_nodelet/right/image_rect_color/compressed/parameter_descriptions
/zed/zed_nodelet/right/image_rect_color/compressed/parameter_updates
/zed/zed_nodelet/right/image_rect_color/compressedDepth
/zed/zed_nodelet/right/image_rect_color/compressedDepth/parameter_descriptions
/zed/zed_nodelet/right/image_rect_color/compressedDepth/parameter_updates
/zed/zed_nodelet/right/image_rect_color/theora
/zed/zed_nodelet/right/image_rect_color/theora/parameter_descriptions
/zed/zed_nodelet/right/image_rect_color/theora/parameter_updates
/zed/zed_nodelet/right/image_rect_gray
/zed/zed_nodelet/right/image_rect_gray/compressed
/zed/zed_nodelet/right/image_rect_gray/compressed/parameter_descriptions
/zed/zed_nodelet/right/image_rect_gray/compressed/parameter_updates
/zed/zed_nodelet/right/image_rect_gray/compressedDepth
/zed/zed_nodelet/right/image_rect_gray/compressedDepth/parameter_descriptions
/zed/zed_nodelet/right/image_rect_gray/compressedDepth/parameter_updates
/zed/zed_nodelet/right/image_rect_gray/theora
/zed/zed_nodelet/right/image_rect_gray/theora/parameter_descriptions
/zed/zed_nodelet/right/image_rect_gray/theora/parameter_updates
/zed/zed_nodelet/right_raw/camera_info
/zed/zed_nodelet/right_raw/image_raw_color
/zed/zed_nodelet/right_raw/image_raw_color/compressed
/zed/zed_nodelet/right_raw/image_raw_color/compressed/parameter_descriptions
/zed/zed_nodelet/right_raw/image_raw_color/compressed/parameter_updates
/zed/zed_nodelet/right_raw/image_raw_color/compressedDepth
/zed/zed_nodelet/right_raw/image_raw_color/compressedDepth/parameter_descriptions
/zed/zed_nodelet/right_raw/image_raw_color/compressedDepth/parameter_updates
/zed/zed_nodelet/right_raw/image_raw_color/theora
/zed/zed_nodelet/right_raw/image_raw_color/theora/parameter_descriptions
/zed/zed_nodelet/right_raw/image_raw_color/theora/parameter_updates
/zed/zed_nodelet/right_raw/image_raw_gray
/zed/zed_nodelet/right_raw/image_raw_gray/compressed
/zed/zed_nodelet/right_raw/image_raw_gray/compressed/parameter_descriptions
/zed/zed_nodelet/right_raw/image_raw_gray/compressed/parameter_updates
/zed/zed_nodelet/right_raw/image_raw_gray/compressedDepth
/zed/zed_nodelet/right_raw/image_raw_gray/compressedDepth/parameter_descriptions
/zed/zed_nodelet/right_raw/image_raw_gray/compressedDepth/parameter_updates
/zed/zed_nodelet/right_raw/image_raw_gray/theora
/zed/zed_nodelet/right_raw/image_raw_gray/theora/parameter_descriptions
/zed/zed_nodelet/right_raw/image_raw_gray/theora/parameter_updates
/zed/zed_nodelet/stereo/image_rect_color
/zed/zed_nodelet/stereo/image_rect_color/compressed
/zed/zed_nodelet/stereo/image_rect_color/compressed/parameter_descriptions
/zed/zed_nodelet/stereo/image_rect_color/compressed/parameter_updates
/zed/zed_nodelet/stereo/image_rect_color/compressedDepth
/zed/zed_nodelet/stereo/image_rect_color/compressedDepth/parameter_descriptions
/zed/zed_nodelet/stereo/image_rect_color/compressedDepth/parameter_updates
/zed/zed_nodelet/stereo/image_rect_color/theora
/zed/zed_nodelet/stereo/image_rect_color/theora/parameter_descriptions
/zed/zed_nodelet/stereo/image_rect_color/theora/parameter_updates
/zed/zed_nodelet/stereo_raw/image_raw_color
/zed/zed_nodelet/stereo_raw/image_raw_color/compressed
/zed/zed_nodelet/stereo_raw/image_raw_color/compressed/parameter_descriptions
/zed/zed_nodelet/stereo_raw/image_raw_color/compressed/parameter_updates
/zed/zed_nodelet/stereo_raw/image_raw_color/compressedDepth
/zed/zed_nodelet/stereo_raw/image_raw_color/compressedDepth/parameter_descriptions
/zed/zed_nodelet/stereo_raw/image_raw_color/compressedDepth/parameter_updates
/zed/zed_nodelet/stereo_raw/image_raw_color/theora
/zed/zed_nodelet/stereo_raw/image_raw_color/theora/parameter_descriptions
/zed/zed_nodelet/stereo_raw/image_raw_color/theora/parameter_updates
/zed/zed_nodelet/temperature/imu
/zed/zed_nodelet/temperature/left
/zed/zed_nodelet/temperature/right
/zed/zed_nodelet_manager/bond
/zed/zed_nodelet_manager/parameter_descriptions
/zed/zed_nodelet_manager/parameter_updates
/zed2i/zed_node/depth/depth_registered
/zed2i/zed_node/depth/depth_registered/compressedDepth
/zed2i/zed_node/left/camera_info
/zed2i/zed_node/obj_det/objects