Hi, I am trying to export VIEW.DEPTH and VIEW.DEPTH_RIGHT in one frame. Below is the key Python code.
init_params = sl.InitParameters(input_t=input_type, svo_real_time_mode=False, enable_right_side_measure=True)
status = zedSVO.open(init_params)
runtime = sl.RuntimeParameters(confidence_threshold=100, texture_confidence_threshold=100, remove_saturated_areas=False)
zedSVO.retrieve_image(mat_left, sl.VIEW.LEFT, sl.MEM.CPU, low_resolution)
zedSVO.retrieve_image(mat_right, sl.VIEW.RIGHT, sl.MEM.CPU, low_resolution)
zedSVO.retrieve_image(mat_left_depth_img, sl.VIEW.DEPTH, sl.MEM.CPU, low_resolution)
zedSVO.retrieve_image(mat_right_depth_img, sl.VIEW.DEPTH_RIGHT, sl.MEM.CPU, low_resolution)
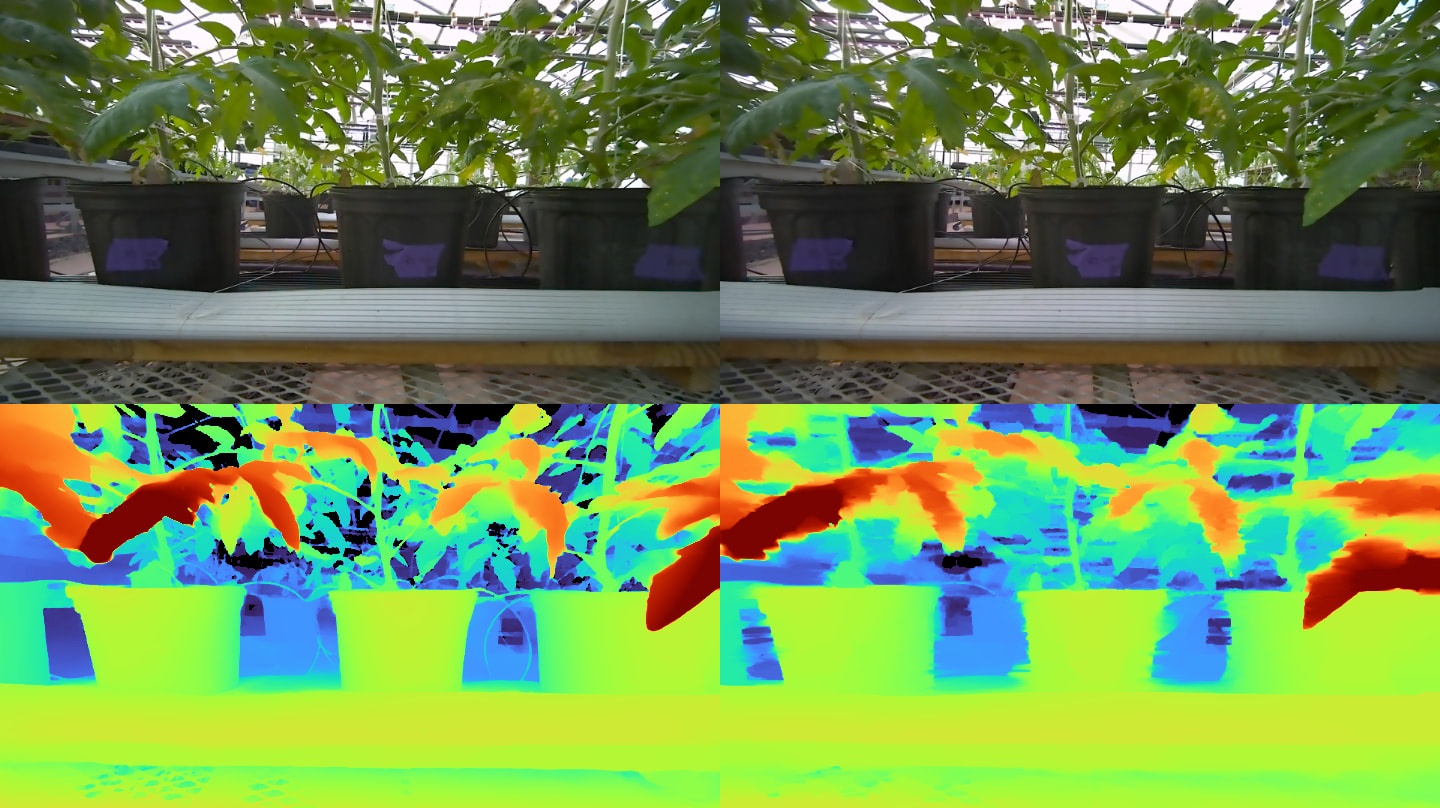
From Persistent Black Line on Left Side of ZED Depth Mat, I understand the right depth is also based on the left coordinate, so the space behind the left view is not calculated for depth. But, in the left view, the place that does not overlap with the right view can be calculated. I wonder why the place in the right view that does not overlap cannot be calculated.
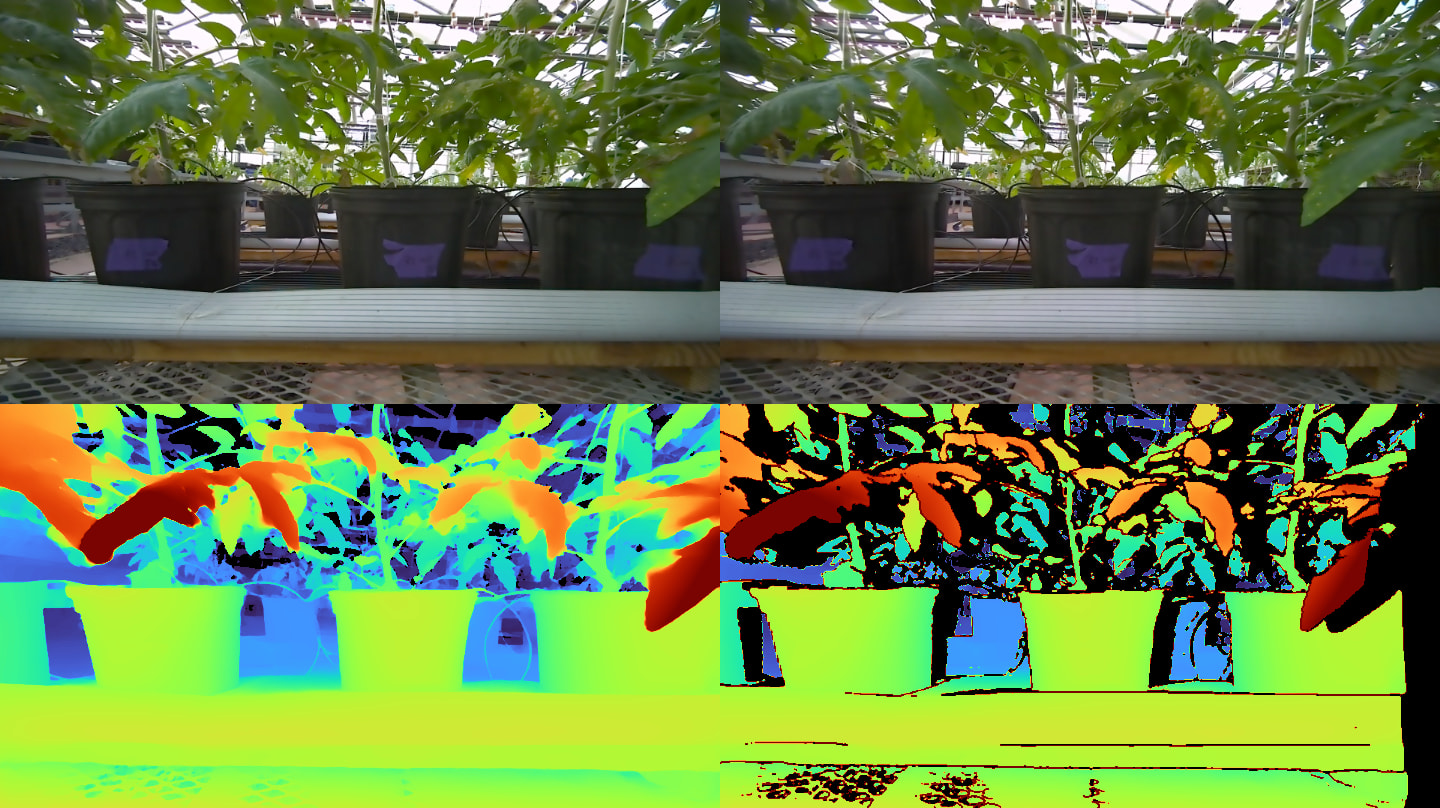
Besides, when enable_fill_mode=True, the right depth view’s shade area all becomes blurry. Is there any way to fill these areas with clear/accurate depth?