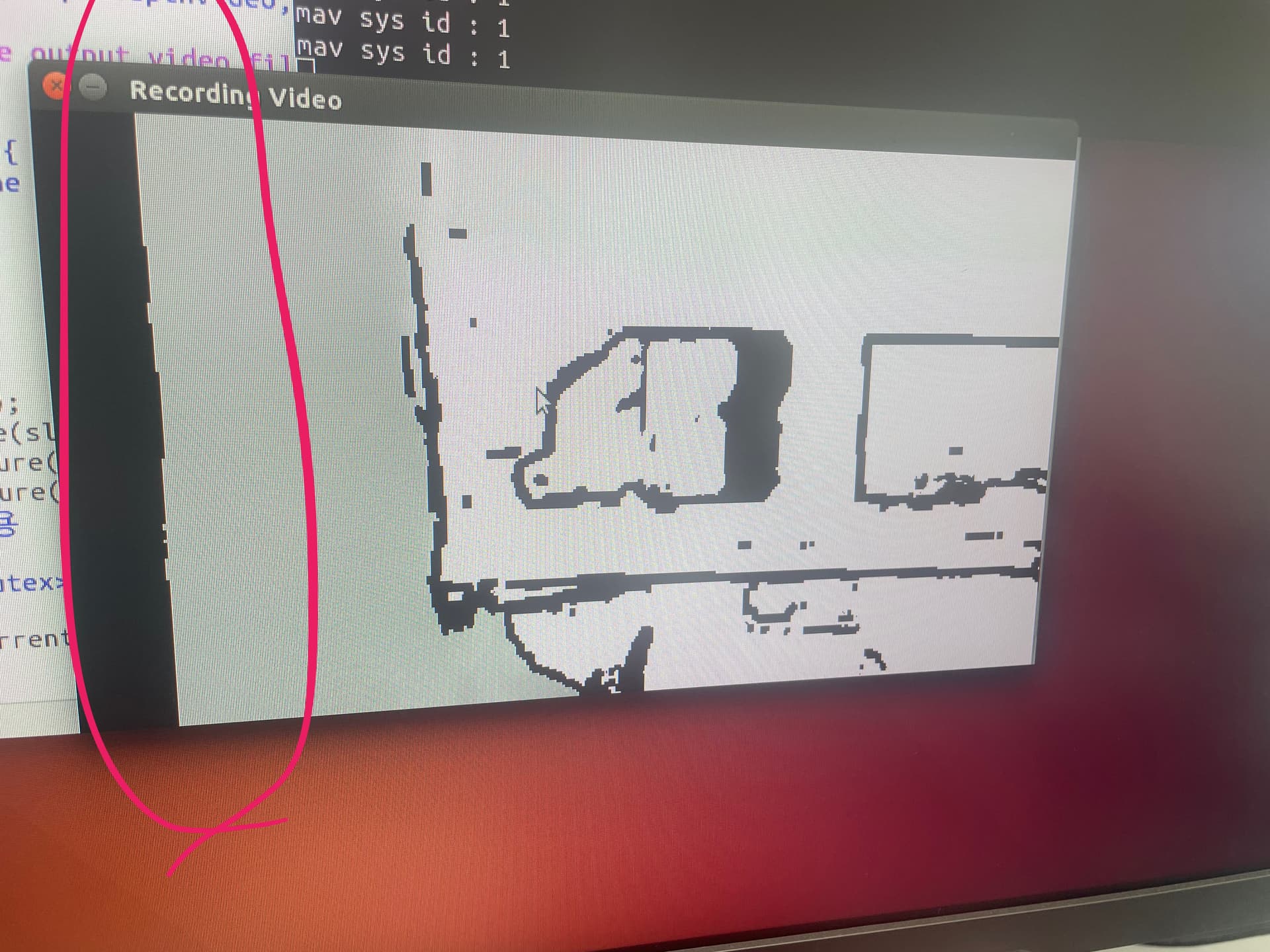
About a month ago, I ran the ZED obstacle detection code and noticed that the distance calculation on the left side of the depth map was always blank. I initially thought it might be an issue with my code.
Today, I displayed the raw depth map using different code and observed the same issue:
Aren’t the “Left” and “Right” variables for the ZED camera used for visual data and not for depth sensing? Is there a distinction between “left” and “right” depth data? I haven’t seen this addressed in the example code or the reference manual (perhaps that’s my oversight).
That dark band is expected. it’s the zone of the left image that does not overlap the right image, so it’s not possible to extract depth information from that zone.
If you take a depth image generated using the right image as the reference image, you will find the dark bandwidth on the right side.
So, if I understand correctly, to obtain overall depth, I need to combine the right and left depth images.
However, I don’t see ‘right depth’ and ‘left depth’ in the official example code, even though the visual camera has left and right attributes. Are these ‘right depth’ images available in the code? If they are, I’ll look for them myself—please don’t spend too much time on this question. If an expert can confirm this, I’ll mark this post as solved.