Hi, I`m a robotics researcher who are using ZED X cameras with Jetson Orin.
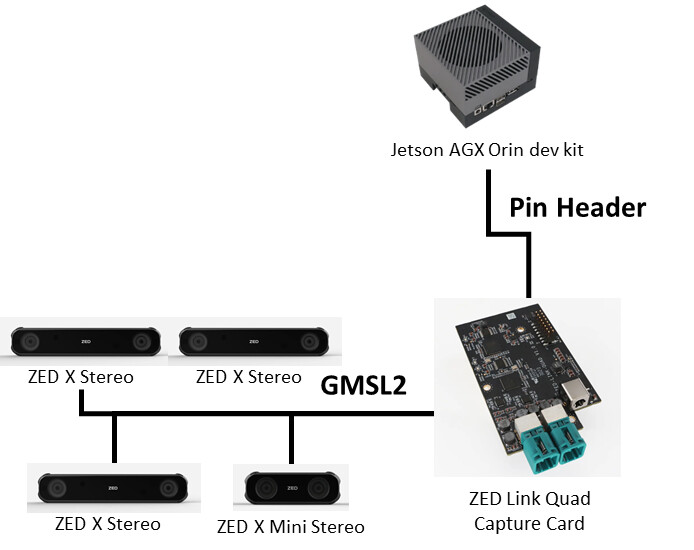
The wiring diagram is shown in the figure below. Using a ZED Link Quad Capture Card on the Jetson Orin Board, we connected a total of 4 cameras by connecting 3 ZED X cameras and 1 ZED X Mini camera.
There are two main issues.
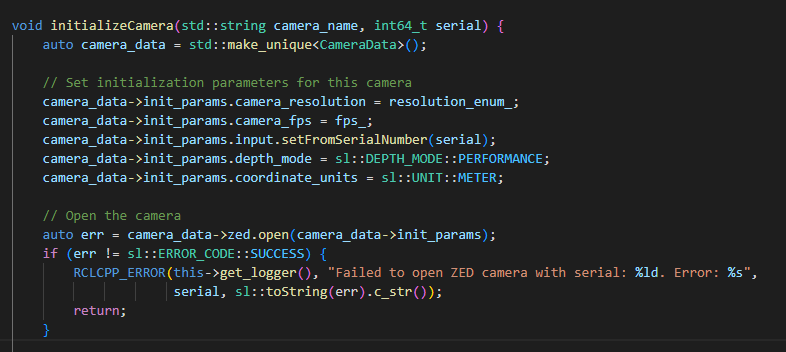
Using the C++ SDK, we managed to run four threads to run each of the four cameras. However, this can lead to success or failure of camera initialization. Why is that?
The synchronization of the 4 cameras is not working well. How can I check if I need to do something else to synchronize or if synchronization is enabled?
Can you share a snippet of code showing how you are opening the cameras concurrently? Are you specifying the Camera ID or the Camera Serial Number in the InitParameters of each sl::Camera object?
How did you verify the camera synchronization?
Please note that the timestamps cannot be identical because they are assigned when the ZED X Driver fully receives each frame.
GMSL2 is a serialized protocol, so timestamps are assigned one frame after each other.
As long as the timestamp difference is less than a grab period you can be sure that the frames have been acquired at the same instant.
Please note that the cameras connected to the two different GMSL2 ports of the ZED Link Quad capture card are not synchronized.
To synchronize 4 cameras you must install the ZED X Driver v1.3.0 and connect all the 4 cameras to the same GMSL2 port.
With the new 5.0 SDK and 1.3 driver, are the serializer synched or still need to execute these I2C commands?
## using JP6:
sudo i2cset -y -f 30 0x29 0x04 0xa0 0x04 i
sudo i2cset -y -f 34 0x29 0x04 0xa0 0x08 i
sudo i2cset -y -f 34 0x29 0x03 0x06 0x83 i
sudo i2cset -y -f 34 0x29 0x03 0x07 0x90 i
sudo i2cset -y -f 34 0x29 0x00 0x18 0x0F i
Or would you suggest directly connecting 4 camera to 1 port since tthey will be triggered with 1 signal? Would connecting 4 camera to 1 GMSL2 port cause performance drop, since there is a limit of bandwith limit each port has?
Which approach is more robust? I need synchronization for multi camera SLAM.