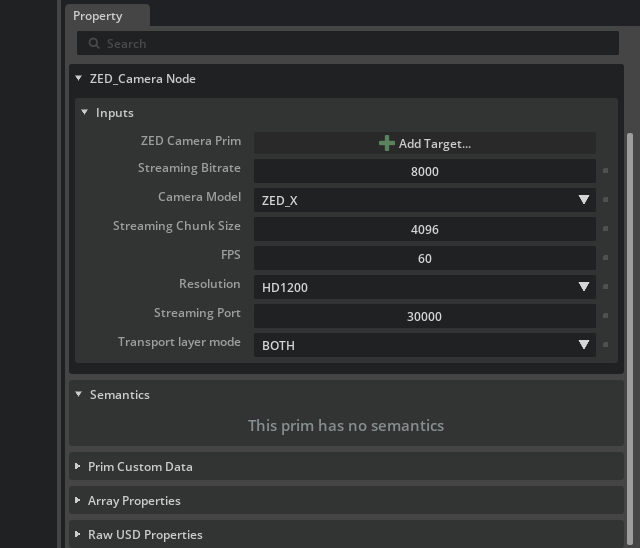
I cannot find any options or tutorial examples for publishing an RGB topic or a Depth image topic so that my ROS 2 node can subscribe to them for processing. These are the properties of the ‘ZED Camera Helper’ node when creating an OmniGraph. Does it mean I have to write a custom node and use the ZED SDK to retrieve the image data manually?