print(zed.get_camera_information().camera_configuration.calibration_parameters_raw.getCameraBaseline())
AttributeError: ‘pyzed.sl.CalibrationParameters’ object has no attribute ‘getCameraBaseline’
The correct function name is get_camera_baseline:
https://www.stereolabs.com/docs/api/python/classpyzed_1_1sl_1_1CalibrationParameters.html#a629c54c7d843f0330414d007b3715d43
yes,i get it ,but what is the depth map ? pix? or real distance? i get an 1920*1080 matrix,but i dont know what does it mean adout the number. it is real distance or need to compute? thanks for your farther reply
[ 0 0 0 … 2346 2346 2347]
[ 0 0 0 … 2347 2347 2347]
[ 0 0 0 … 2347 2347 2347]]
[[2994 2994 2994 … 5336 5343 5347]
[3057 2994 2994 … 5357 5359 5360]
[3065 2992 2992 … 5369 5368 5367],the distance is 1.2m,but get more than 2000
Hi @Hua2544
The depth map should be in the unit you pass in the InitParameters. By default it’s millimeters, which checks out with your values.
The distance is relative to the camera, but an 80cm error is a lot.
- What depth mode were you using?
- What are you filming? The stereovision algorithms do not work optimally with flat uniform surfaces like some walls for instance.
- Please send us a screenshot of the scene from a depth viewer, and ideally, an SVO recording so we can verify if there’s an issue with the calibration.
ok,thanks,i will, i have posted it in another post
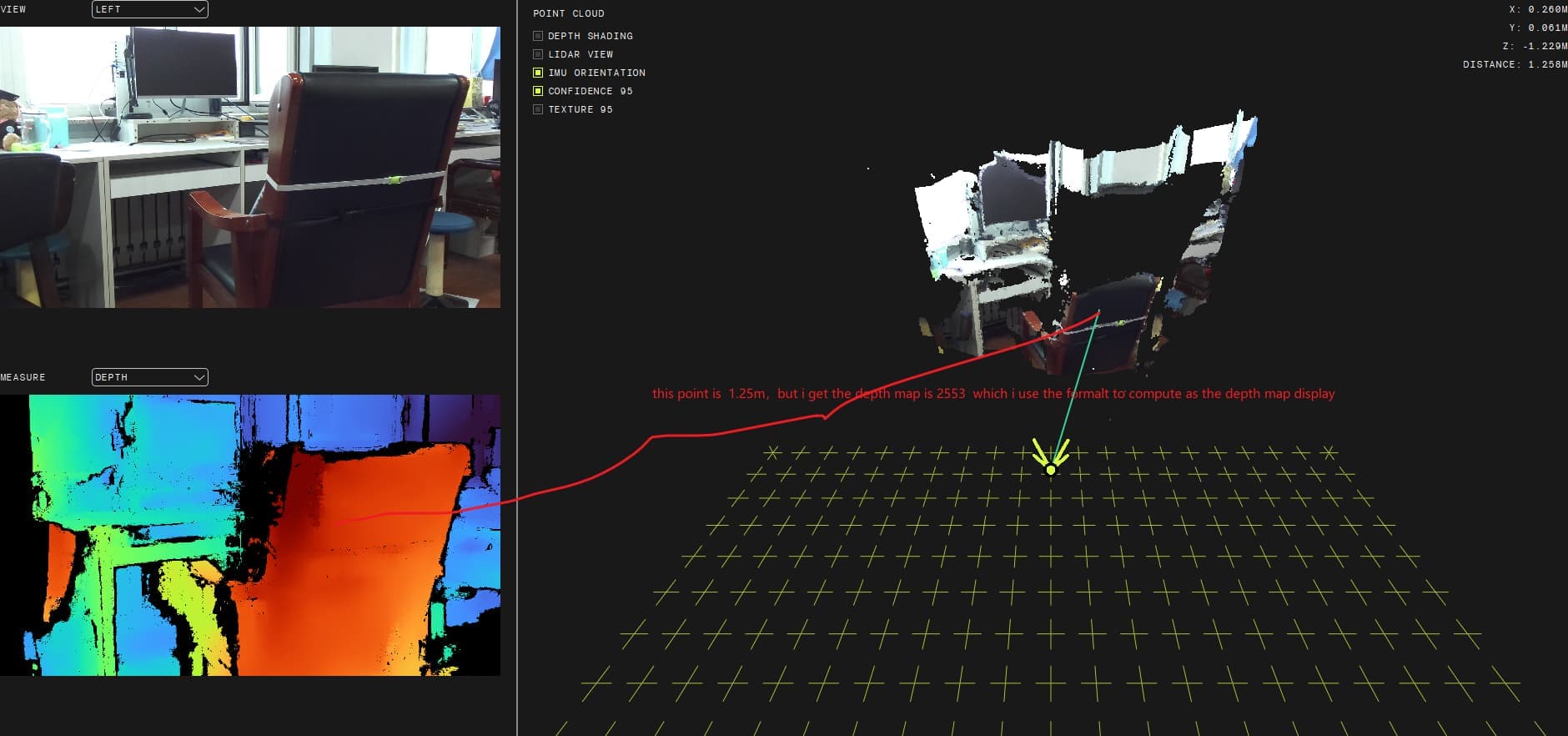
The same value should be the same in the depth map and the Depth Viewer view.
Please give a summary of:
- How you retrieve the depth map: code sample
- What code are you using overall? Did you start from a ZED SDK sample? Which one?
- What depth mode are you using?
You can also save the depth map into a PNG image with the sl.Mat.write() function, and inspect it to see if the values are coherent. If you can, please share this image here.