I went through the setup of isaac ros: Setting up Isaac™ ROS to work with ZED Cameras in ROS 2 - Stereolabs
When I wanted to test the ros2 wrapper I executed on the x86 system.
First docker Terminal I executed
ros2 launch zed_wrapper zed_camera.launch.py camera_model:=zed2i enable_ipc:=false
In the second terminal I enter docker exec -it containername bash
There I build the example file and executed:
ros2 launch zed_display_rviz2 display_zed_cam.launch.py camera_model:=zed2i enable_ipc:=false
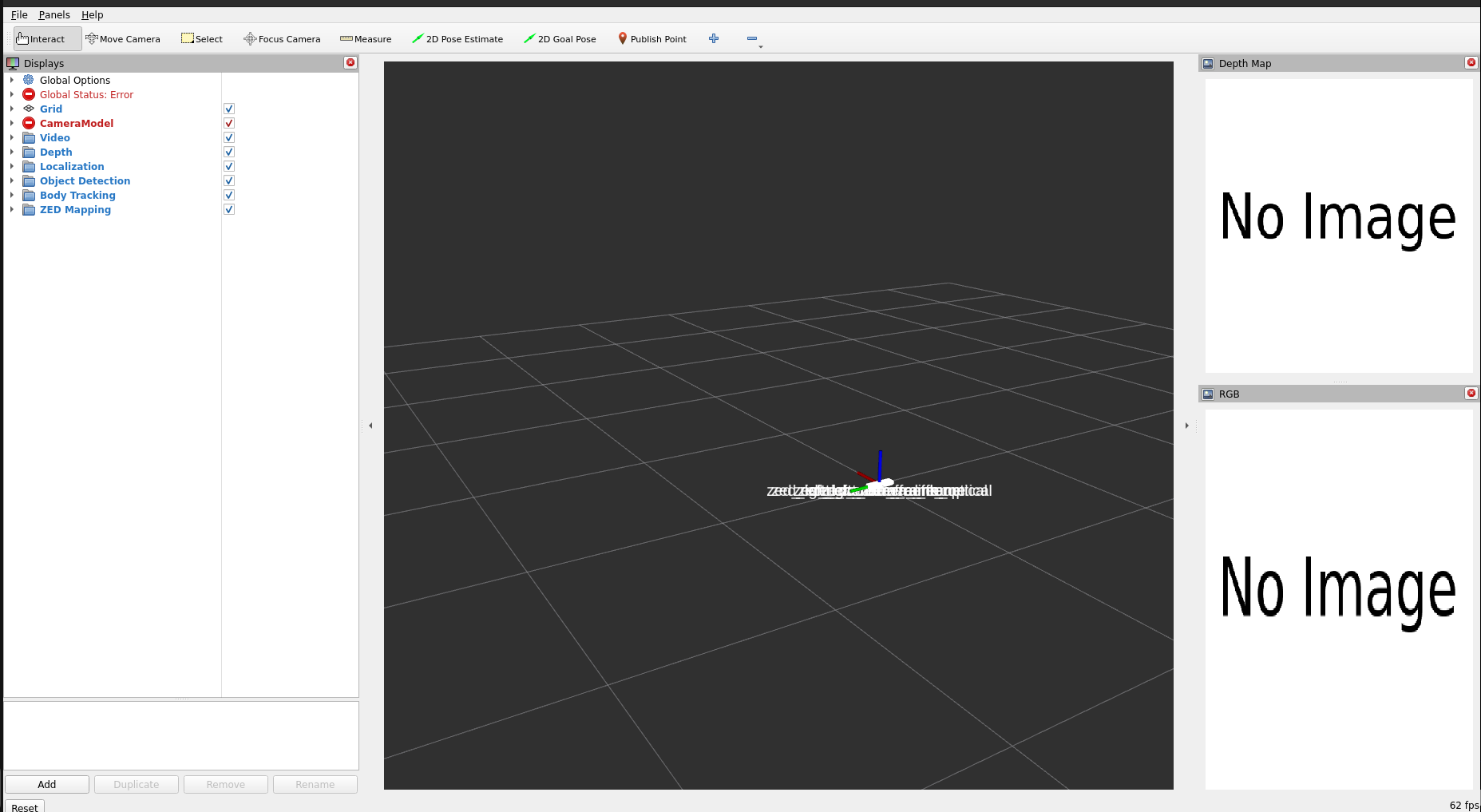
Afterwards the Figure below showed up. Camera was connected but no image was displayed.
Can you help me with this connection?
Also when doing ros2 topic echo any topic does not respond. The Explorer and Depth images build in testing applications does work. The wrapper and isaac ros connetions not.
ros2 topic echo /zed/zed_node/imu/data
Myzhar
November 25, 2025, 8:50am
2
In this case, I think that you have two Docker containers that are not communicating.
I recommend you ask the NVIDIA Developer Forum because they created the scripts to start the images, and they should know what to modify to fix this problem.
Thanks for your answer,
I am doing this in a single Docker container, following Setting up Isaac™ ROS to work with ZED Cameras in ROS 2 - Stereolabs . My workflow is as follows:
I start the Isaac ROS dev container with
Inside that same container, I use two terminals attached to the same container (second one with docker exec -it <container_name> bash, but it’s the same running container, not a new one).
In terminal 1 (inside the container) I run:
In terminal 2 (also inside the same container) I run:
Since both launch files run in the same container, do you have any suggestions on how I can verify that this connection is being made correctly? Any clues would be greatly appreciated.
Dear support Team, I have the same error on the jetson. I have only one Docker container for sure that I am accessing where I run rviz and your ros2 node internally. I think it must have to do with the driver connection to the host which is defined in your sdk. Explorer opening works but every topic concerning Ros2 does not get any data:Setting up Isaac™ ROS to work with ZED Cameras in ROS 2 - Stereolabs
I also payed attention on the jetson to put the flag
enable_ipc:=false
in my ros2 run commands like it is described there. The Wrapper Examples doesn’t work in the docker container.
What can be a solution there?
Myzhar
November 25, 2025, 5:07pm
5
This is wrong because it tries to restart the node. You must start RViz2 without the ZED node:
ros2 launch zed_display_rviz2 display_zed_cam.launch.py start_zed_node:=false camera_model:=zed2i
Otherwise, it’s even simpler if you start directly node and RViz2 in a single terminal:
ros2 launch zed_display_rviz2 display_zed_cam.launch.py camera_model:=zed2i enable_ipc:=false
Ok and how is it possible only with one terminal and one command possible to do a ros2 topic echo in this dockerized version?
Myzhar
November 26, 2025, 9:34am
7
Try to launch the wrapper with an “&” at the end of the command.
ros2 launch zed_display_rviz2 display_zed_cam.launch.py camera_model:=zed2i enable_ipc:=false &
Please note that the node continues to output the log in the same window, so it may not be simple to get what you need.
Thanks for the reply.
It is still not working with the ‘&’ at the end
root@student2-aut:/workspaces/isaac_ros-dev# source install/setup.bash
root@student2-aut:/workspaces/isaac_ros-dev# ros2 topic list
/clicked_point
/diagnostics
/goal_pose
/initialpose
/parameter_events
/rosout
/tf
/tf_static
/zed/joint_states
/zed/plane_marker
/zed/plane_marker_array
/zed/waypoints
/zed/zed_description
/zed/zed_node/body_trk/skeletons
/zed/zed_node/depth/camera_info
/zed/zed_node/depth/depth_registered
/zed/zed_node/depth/depth_registered/camera_info
/zed/zed_node/depth/depth_registered/nitros
/zed/zed_node/imu/data
/zed/zed_node/mapping/fused_cloud
/zed/zed_node/obj_det/objects
/zed/zed_node/odom
/zed/zed_node/path_map
/zed/zed_node/path_odom
/zed/zed_node/point_cloud/cloud_registered
/zed/zed_node/pose
/zed/zed_node/pose/landmarks
/zed/zed_node/pose/status
/zed/zed_node/rgb/color/rect/camera_info
/zed/zed_node/rgb/color/rect/image
/zed/zed_node/rgb/color/rect/image/camera_info
/zed/zed_node/rgb/color/rect/image/nitros
/zed/zed_node/status/health
/zed/zed_node/status/heartbeat
root@student2-aut:/workspaces/isaac_ros-dev# ros2 topic echo /zed/zed_node/imu/data
Data ist not comming out of any topic.
Myzhar
November 27, 2025, 10:12am
9
It looks like the node is stuck.
Can you share the log of the node and a screenshot of the diagnostic status ?
when we start the node ros2 launch zed_wrapper zed_camera.launch.py camera_model:=zed2i enable_ipc:=false &we often at first recieve this message
14.075564894\] \[zed.zed_node\]: \* Debug Advanced: FALSE
\[component_container_isolated-2\] \[INFO\] \[1764259314.075630383\] \[zed.zed_node\]: === TOPIC selection parameters ===
\[component_container_isolated-2\] \[INFO\] \[1764259314.075680770\] \[zed.zed_node\]: \* Publish Status: TRUE
\[component_container_isolated-2\] \[INFO\] \[1764259314.075714186\] \[zed.zed_node\]: \* Publish Left/Right images: FALSE
\[component_container_isolated-2\] \[INFO\] \[1764259314.075732709\] \[zed.zed_node\]: \* Publish Raw images: FALSE
\[component_container_isolated-2\] \[INFO\] \[1764259314.075754191\] \[zed.zed_node\]: \* Publish Gray images: FALSE
\[component_container_isolated-2\] \[INFO\] \[1764259314.075775091\] \[zed.zed_node\]: \* Publish RGB image: TRUE
\[component_container_isolated-2\] \[INFO\] \[1764259314.075790462\] \[zed.zed_node\]: \* Publish Stereo image: FALSE
\[component_container_isolated-2\] \[INFO\] \[1764259314.075811714\] \[zed.zed_node\]: \* Publish ROI Mask image: FALSE
\[component_container_isolated-2\] \[INFO\] \[1764259314.075833228\] \[zed.zed_node\]: \* Publish Depth Map: TRUE
\[component_container_isolated-2\] \[INFO\] \[1764259314.075949349\] \[zed.zed_node\]: \* Publish Depth Info: FALSE
\[component_container_isolated-2\] \[INFO\] \[1764259314.075999747\] \[zed.zed_node\]: \* Publish Point Cloud: TRUE
\[component_container_isolated-2\] \[INFO\] \[1764259314.076050353\] \[zed.zed_node\]: \* Publish Depth Confidence: FALSE
\[component_container_isolated-2\] \[INFO\] \[1764259314.076096164\] \[zed.zed_node\]: \* Publish Disparity: FALSE
\[component_container_isolated-2\] \[INFO\] \[1764259314.076121238\] \[zed.zed_node\]: \* Publish IMU: TRUE
\[component_container_isolated-2\] \[INFO\] \[1764259314.076139824\] \[zed.zed_node\]: \* Publish IMU Raw: FALSE
\[component_container_isolated-2\] \[INFO\] \[1764259314.076159732\] \[zed.zed_node\]: \* Publish LeftCam/IMU Transf.: FALSE
\[component_container_isolated-2\] \[INFO\] \[1764259314.076183604\] \[zed.zed_node\]: \* Publish Magnetometer: FALSE
\[component_container_isolated-2\] \[INFO\] \[1764259314.076204471\] \[zed.zed_node\]: \* Publish Barometer: FALSE
\[component_container_isolated-2\] \[INFO\] \[1764259314.076224307\] \[zed.zed_node\]: \* Publish Temperature: FALSE
\[component_container_isolated-2\] \[INFO\] \[1764259314.076246443\] \[zed.zed_node\]: \* Publish Odometry/Pose: TRUE
\[component_container_isolated-2\] \[INFO\] \[1764259314.076267332\] \[zed.zed_node\]: \* Publish Pose with Covariance: FALSE
\[component_container_isolated-2\] \[INFO\] \[1764259314.076285294\] \[zed.zed_node\]: \* Publish Camera Path: FALSE
\[component_container_isolated-2\] \[INFO\] \[1764259314.076303304\] \[zed.zed_node\]: \* Publish Detection Plane: FALSE
\[component_container_isolated-2\] \[INFO\] \[1764259314.076326326\] \[zed.zed_node\]: === SVO INPUT parameters ===
\[component_container_isolated-2\] \[INFO\] \[1764259314.076381765\] \[zed.zed_node\]: === LOCAL STREAMING parameters ===
\[component_container_isolated-2\] \[INFO\] \[1764259314.076403737\] \[zed.zed_node\]: === GENERAL parameters ===
\[component_container_isolated-2\] \[INFO\] \[1764259314.076441536\] \[zed.zed_node\]: \* Camera model: zed2i - ZED 2i
\[component_container_isolated-2\] \[INFO\] \[1764259314.076462041\] \[zed.zed_node\]: \* Camera name: zed
\[component_container_isolated-2\] \[INFO\] \[1764259314.076488503\] \[zed.zed_node\]: \* Camera SN: 0
\[component_container_isolated-2\] \[INFO\] \[1764259314.076510218\] \[zed.zed_node\]: \* Camera ID: -1
\[component_container_isolated-2\] \[INFO\] \[1764259314.076533919\] \[zed.zed_node\]: \* Camera timeout \[sec\]: 5
\[component_container_isolated-2\] \[INFO\] \[1764259314.076555840\] \[zed.zed_node\]: \* Camera reconnection temptatives: 5
\[component_container_isolated-2\] \[INFO\] \[1764259314.076581222\] \[zed.zed_node\]: \* Camera framerate: 15
\[component_container_isolated-2\] \[INFO\] \[1764259314.076603462\] \[zed.zed_node\]: \* GPU ID: -1
\[component_container_isolated-2\] \[INFO\] \[1764259314.076623161\] \[zed.zed_node\]: \* Asynchronous image retrieval: FALSE
\[component_container_isolated-2\] \[INFO\] \[1764259314.076644722\] \[zed.zed_node\]: \* Image Validity Check: 1
\[component_container_isolated-2\] \[INFO\] \[1764259314.076677457\] \[zed.zed_node\]: \* Camera resolution: HD1080
\[component_container_isolated-2\] \[INFO\] \[1764259314.076701960\] \[zed.zed_node\]: \* Publishing resolution: CUSTOM
\[component_container_isolated-2\] \[INFO\] \[1764259314.076749734\] \[zed.zed_node\]: \* Publishing downscale factor: 2
\[component_container_isolated-2\] \[INFO\] \[1764259314.076773698\] \[zed.zed_node\]: \* OpenCV custom calibration:
\[component_container_isolated-2\] \[INFO\] \[1764259314.076797935\] \[zed.zed_node\]: \* Camera self calibration: TRUE
\[component_container_isolated-2\] \[INFO\] \[1764259314.076822814\] \[zed.zed_node\]: \* Camera flip: FALSE
\[component_container_isolated-2\] \[INFO\] \[1764259314.076848465\] \[zed.zed_node\]: \* Publish framerate \[Hz\]: 15
\[component_container_isolated-2\] \[INFO\] \[1764259314.076863875\] \[zed.zed_node\]: === VIDEO parameters ===
\[component_container_isolated-2\] \[INFO\] \[1764259314.076890646\] \[zed.zed_node\]: \* Brightness: 4 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1764259314.076919757\] \[zed.zed_node\]: \* Contrast: 4 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1764259314.076940649\] \[zed.zed_node\]: \* Hue: 0 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1764259314.076967036\] \[zed.zed_node\]: \* Saturation: 4 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1764259314.076987516\] \[zed.zed_node\]: \* Sharpness: 4 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1764259314.077009739\] \[zed.zed_node\]: \* Gamma: 8 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1764259314.077031380\] \[zed.zed_node\]: \* Auto Exposure/Gain: TRUE \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1764259314.077055879\] \[zed.zed_node\]: \* Exposure: 80 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1764259314.077071970\] \[zed.zed_node\]: \* Gain: 80 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1764259314.077104784\] \[zed.zed_node\]: \* Auto White Balance: TRUE \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1764259314.077134205\] \[zed.zed_node\]: \* White Balance Temperature: 42 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1764259314.077148852\] \[zed.zed_node\]: === DEPTH parameters ===
\[component_container_isolated-2\] \[INFO\] \[1764259314.077193697\] \[zed.zed_node\]: \* Depth mode: NEURAL LIGHT \[4\]
\[component_container_isolated-2\] \[INFO\] \[1764259314.077223662\] \[zed.zed_node\]: \* Min depth \[m\]: 0.01
\[component_container_isolated-2\] \[INFO\] \[1764259314.077248311\] \[zed.zed_node\]: \* Max depth \[m\]: 15
\[component_container_isolated-2\] \[INFO\] \[1764259314.077266964\] \[zed.zed_node\]: \* Depth Stabilization: 30
\[component_container_isolated-2\] \[INFO\] \[1764259314.077272661\] \[zed.zed_node\]: \* OpenNI mode (16bit depth): DISABLED with NITROS
\[component_container_isolated-2\] \[INFO\] \[1764259314.077299677\] \[zed.zed_node\]: \* Point cloud rate \[Hz\]: 10
\[component_container_isolated-2\] \[INFO\] \[1764259314.077329372\] \[zed.zed_node\]: \* Point cloud resolution: COMPACT
\[component_container_isolated-2\] \[INFO\] \[1764259314.077353766\] \[zed.zed_node\]: \* Depth Confidence: 95 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1764259314.077374896\] \[zed.zed_node\]: \* Depth Texture Confidence: 100 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1764259314.077395399\] \[zed.zed_node\]: \* Remove saturated areas: TRUE \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1764259314.077402834\] \[zed.zed_node\]: === GNSS FUSION parameters ===
\[component_container_isolated-2\] \[INFO\] \[1764259314.077425168\] \[zed.zed_node\]: \* GNSS fusion enabled: FALSE
\[component_container_isolated-2\] \[INFO\] \[1764259314.077432880\] \[zed.zed_node\]: === POSITIONAL TRACKING parameters ===
\[component_container_isolated-2\] \[INFO\] \[1764259314.077459541\] \[zed.zed_node\]: \* Positional tracking enabled: TRUE
\[component_container_isolated-2\] \[INFO\] \[1764259314.077485600\] \[zed.zed_node\]: \* Positional tracking mode: GEN 2
\[component_container_isolated-2\] \[INFO\] \[1764259314.077507991\] \[zed.zed_node\]: \* Map frame id: map
\[component_container_isolated-2\] \[INFO\] \[1764259314.077534326\] \[zed.zed_node\]: \* Odometry frame id: odom
\[component_container_isolated-2\] \[INFO\] \[1764259314.077632260\] \[zed.zed_node\]: \* Broadcast Odometry TF: TRUE
\[component_container_isolated-2\] \[INFO\] \[1764259314.077652433\] \[zed.zed_node\]: \* Broadcast Pose TF: TRUE
\[component_container_isolated-2\] \[INFO\] \[1764259314.077682727\] \[zed.zed_node\]: \* Depth minimum range: 0
\[component_container_isolated-2\] \[INFO\] \[1764259314.077715923\] \[zed.zed_node\]: \* TF timestamp offset: 0 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1764259314.077738765\] \[zed.zed_node\]: \* Path publishing rate: 2 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1764259314.077776945\] \[zed.zed_node\]: \* Path history lenght: -1
\[component_container_isolated-2\] \[INFO\] \[1764259314.077804315\] \[zed.zed_node\]: \* Initial pose: \[0,0,0,0,0,0,\]
\[component_container_isolated-2\] \[INFO\] \[1764259314.077827738\] \[zed.zed_node\]: \* Area Memory: TRUE
\[component_container_isolated-2\] \[INFO\] \[1764259314.077848829\] \[zed.zed_node\]: \* Area Memory File:
\[component_container_isolated-2\] \[INFO\] \[1764259314.077872519\] \[zed.zed_node\]: \* Save Area Memory on closing: FALSE
\[component_container_isolated-2\] \[INFO\] \[1764259314.077891584\] \[zed.zed_node\]: \* Camera is static: FALSE
\[component_container_isolated-2\] \[INFO\] \[1764259314.077916888\] \[zed.zed_node\]: \* Gravity as origin: TRUE
\[component_container_isolated-2\] \[INFO\] \[1764259314.077947515\] \[zed.zed_node\]: \* IMU Fusion: TRUE
\[component_container_isolated-2\] \[INFO\] \[1764259314.078114468\] \[zed.zed_node\]: \* Floor Alignment: FALSE
\[component_container_isolated-2\] \[INFO\] \[1764259314.078184211\] \[zed.zed_node\]: \* Reset Odometry with Loop Closure: TRUE
\[component_container_isolated-2\] \[INFO\] \[1764259314.078240474\] \[zed.zed_node\]: \* Publish 3D Landmarks: FALSE
\[component_container_isolated-2\] \[INFO\] \[1764259314.078304291\] \[zed.zed_node\]: \* Publish Landmark Skip Frame:
\[component_container_isolated-2\] \[INFO\] \[1764259314.078358003\] \[zed.zed_node\]: \* 2D mode: FALSE
\[component_container_isolated-2\] \[INFO\] \[1764259314.078411496\] \[zed.zed_node\]: \* Reset pose with SVO loop: TRUE
\[component_container_isolated-2\] \[INFO\] \[1764259314.078419139\] \[zed.zed_node\]: === Region of Interest parameters ===
\[component_container_isolated-2\] \[INFO\] \[1764259314.078471442\] \[zed.zed_node\]: \* Automatic ROI generation: FALSE
\[component_container_isolated-2\] \[INFO\] \[1764259314.078539367\] \[zed.zed_node\]: \* Manual ROI polygon: [ ]
\[component_container_isolated-2\] \[INFO\] \[1764259314.078546722\] \[zed.zed_node\]: === SENSORS STACK parameters ===
\[component_container_isolated-2\] \[INFO\] \[1764259314.078602198\] \[zed.zed_node\]: \* Broadcast IMU TF \[not for ZED\]: FALSE
\[component_container_isolated-2\] \[INFO\] \[1764259314.078669574\] \[zed.zed_node\]: \* Sensors Camera Sync: FALSE
\[component_container_isolated-2\] \[INFO\] \[1764259314.078728416\] \[zed.zed_node\]: \* Sensors publishing rate \[Hz\]: 100 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1764259314.078736461\] \[zed.zed_node\]: === Spatial Mapping parameters ===
\[component_container_isolated-2\] \[INFO\] \[1764259314.078768085\] \[zed.zed_node\]: \* Spatial Mapping Enabled: FALSE
\[component_container_isolated-2\] \[INFO\] \[1764259314.078795858\] \[zed.zed_node\]: \* Spatial Mapping resolution \[m\]: 0.05
\[component_container_isolated-2\] \[INFO\] \[1764259314.078822848\] \[zed.zed_node\]: \* 3D Max Mapping range \[m\]: 5
\[component_container_isolated-2\] \[INFO\] \[1764259314.078850943\] \[zed.zed_node\]: \* Map publishing rate \[Hz\]: 1 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1764259314.078878768\] \[zed.zed_node\]: \* Clicked point topic: /clicked_point
\[component_container_isolated-2\] \[INFO\] \[1764259314.078910216\] \[zed.zed_node\]: \* Plane Det. Max Dist. Thresh.: 0.15
\[component_container_isolated-2\] \[INFO\] \[1764259314.078942206\] \[zed.zed_node\]: \* Plane Det. Normals Sim. Thresh.: 15
\[component_container_isolated-2\] \[INFO\] \[1764259314.078957173\] \[zed.zed_node\]: === OBJECT DETECTION parameters ===
\[component_container_isolated-2\] \[INFO\] \[1764259314.078984079\] \[zed.zed_node\]: \* Object Det. enabled: FALSE
\[component_container_isolated-2\] \[INFO\] \[1764259314.079012696\] \[zed.zed_node\]: \* Object Det. allow reduced precision: FALSE
\[component_container_isolated-2\] \[INFO\] \[1764259314.079040919\] \[zed.zed_node\]: \* Object Det. maximum range \[m\]: 20
\[component_container_isolated-2\] \[INFO\] \[1764259314.079079819\] \[zed.zed_node\]: \* Object Det. prediction timeout \[sec\]: 2
\[component_container_isolated-2\] \[INFO\] \[1764259314.079111897\] \[zed.zed_node\]: \* Object Det. tracking: TRUE
\[component_container_isolated-2\] \[INFO\] \[1764259314.079159481\] \[zed.zed_node\]: \* Object Filtering mode: NMS3D
\[component_container_isolated-2\] \[INFO\] \[1764259314.079201123\] \[zed.zed_node\]: \* Object Det. model: MULTI CLASS BOX FAST
\[component_container_isolated-2\] \[INFO\] \[1764259314.079226128\] \[zed.zed_node\]: \* MultiClassBox people: TRUE \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1764259314.079250950\] \[zed.zed_node\]: \* MultiClassBox vehicles: TRUE \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1764259314.079277419\] \[zed.zed_node\]: \* MultiClassBox bags: TRUE \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1764259314.079336008\] \[zed.zed_node\]: \* MultiClassBox animals: TRUE \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1764259314.079503562\] \[zed.zed_node\]: \* MultiClassBox electronics: TRUE \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1764259314.079519240\] \[zed.zed_node\]: \* MultiClassBox fruits and vegetables: TRUE \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1764259314.079530015\] \[zed.zed_node\]: \* MultiClassBox sport-related objects: TRUE \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1764259314.079549087\] \[zed.zed_node\]: \* MultiClassBox people confidence: 65 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1764259314.079563126\] \[zed.zed_node\]: \* MultiClassBox vehicles confidence: 60 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1764259314.079580896\] \[zed.zed_node\]: \* MultiClassBox bags confidence: 40 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1764259314.079596311\] \[zed.zed_node\]: \* MultiClassBox animals confidence: 40 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1764259314.079610499\] \[zed.zed_node\]: \* MultiClassBox electronics confidence: 45 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1764259314.079623757\] \[zed.zed_node\]: \* MultiClassBox fruits and vegetables confidence: 50 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1764259314.079642731\] \[zed.zed_node\]: \* MultiClassBox sport-related objects confidence: 30 \[DYNAMIC\]
\[component_container_isolated-2\] \[INFO\] \[1764259314.079920901\] \[zed.zed_node\]: === STREAMING SERVER parameters ===
\[component_container_isolated-2\] \[INFO\] \[1764259314.079937277\] \[zed.zed_node\]: \* Streaming Server enabled: FALSE
\[component_container_isolated-2\] \[INFO\] \[1764259314.079948772\] \[zed.zed_node\]: \* Stream codec: H264
\[component_container_isolated-2\] \[INFO\] \[1764259314.079960743\] \[zed.zed_node\]: \* Stream port: 30000
\[component_container_isolated-2\] \[INFO\] \[1764259314.079972987\] \[zed.zed_node\]: \* Stream bitrate: 12500
\[component_container_isolated-2\] \[INFO\] \[1764259314.079988710\] \[zed.zed_node\]: \* Stream GOP size: -1
\[component_container_isolated-2\] \[INFO\] \[1764259314.079999592\] \[zed.zed_node\]: \* Stream Chunk size: 16084
\[component_container_isolated-2\] \[INFO\] \[1764259314.080010615\] \[zed.zed_node\]: \* Adaptive bitrate: FALSE
\[component_container_isolated-2\] \[INFO\] \[1764259314.080021572\] \[zed.zed_node\]: \* Target frame rate:0
\[component_container_isolated-2\] \[INFO\] \[1764259314.080025487\] \[zed.zed_node\]: === ADVANCED parameters ===
\[component_container_isolated-2\] \[INFO\] \[1764259314.080037323\] \[zed.zed_node\]: \* Thread sched. policy: SCHED_BATCH
\[component_container_isolated-2\] \[INFO\] \[1764259314.080075265\] \[zed.zed_node\]: === SERVICES ===
\[component_container_isolated-2\] \[INFO\] \[1764259314.080516797\] \[zed.zed_node\]: \* Advertised on service: ‘/zed/zed_node/reset_odometry’
\[component_container_isolated-2\] \[INFO\] \[1764259314.080695547\] \[zed.zed_node\]: \* Advertised on service: ‘/zed/zed_node/reset_pos_tracking’
\[component_container_isolated-2\] \[INFO\] \[1764259314.081221919\] \[zed.zed_node\]: \* Advertised on service: ‘/zed/zed_node/set_pose’
\[component_container_isolated-2\] \[INFO\] \[1764259314.081418186\] \[zed.zed_node\]: \* Advertised on service: ‘/zed/zed_node/save_area_memory’
\[component_container_isolated-2\] \[INFO\] \[1764259314.081589570\] \[zed.zed_node\]: \* Advertised on service: ‘/zed/zed_node/enable_obj_det’
\[component_container_isolated-2\] \[INFO\] \[1764259314.081760213\] \[zed.zed_node\]: \* Advertised on service: ‘/zed/zed_node/enable_body_trk’
\[component_container_isolated-2\] \[INFO\] \[1764259314.082557791\] \[zed.zed_node\]: \* Advertised on service: ‘/zed/zed_node/enable_mapping’
\[component_container_isolated-2\] \[INFO\] \[1764259314.083192360\] \[zed.zed_node\]: \* Advertised on service: ‘/zed/zed_node/enable_streaming’
\[component_container_isolated-2\] \[INFO\] \[1764259314.083379463\] \[zed.zed_node\]: \* Advertised on service: ‘/zed/zed_node/start_svo_rec’
\[component_container_isolated-2\] \[INFO\] \[1764259314.083485260\] \[zed.zed_node\]: \* Advertised on service: ‘/zed/zed_node/stop_svo_rec’
\[component_container_isolated-2\] \[INFO\] \[1764259314.083650914\] \[zed.zed_node\]: \* Advertised on service: ‘/zed/zed_node/set_roi’
\[component_container_isolated-2\] \[INFO\] \[1764259314.083824202\] \[zed.zed_node\]: \* Advertised on service: ‘/zed/zed_node/reset_roi’
\[component_container_isolated-2\] \[INFO\] \[1764259314.083844475\] \[zed.zed_node\]: === STARTING CAMERA ===
\[component_container_isolated-2\] \[INFO\] \[1764259314.083884917\] \[zed.zed_node\]: ZED SDK Version: 5.1.1 - Build 106899_5f817843
\[component_container_isolated-2\] \[INFO\] \[1764259314.085569483\] \[zed.zed_node\]: === CAMERA OPENING ===
\[component_container_isolated-2\] \[2025-11-27 17:01:54 UTC\]\[ZED\]\[INFO\] Logging level INFO
\[component_container_isolated-2\] \[2025-11-27 17:01:55 UTC\]\[ZED\]\[WARNING\] Warning: Recover MCU returns ECx-3
\[component_container_isolated-2\] \[2025-11-27 17:01:55 UTC\]\[ZED\]\[WARNING\] \[Sensors\] MCU module not responding. Attempt module reboot
\[component_container_isolated-2\] \[ZED\]\[MCU\] Permissions denied : can’t open device. Make sure you have installed udev rules or use sudo
\[component_container_isolated-2\] \[2025-11-27 17:01:55 UTC\]\[ZED\]\[WARNING\] Warning: Recover MCU returns ECx-3
\[component_container_isolated-2\] \[2025-11-27 17:01:55 UTC\]\[ZED\]\[WARNING\] \[ZED\] Sensors could not be initialized. Some modules might not work correctly.
\[component_container_isolated-2\] \[2025-11-27 17:01:55 UTC\]\[ZED\]\[INFO\] \[Init\] Camera successfully opened.
\[component_container_isolated-2\] \[2025-11-27 17:01:55 UTC\]\[ZED\]\[INFO\] \[Init\] Camera FW version: 1523
\[component_container_isolated-2\] \[2025-11-27 17:01:55 UTC\]\[ZED\]\[INFO\] \[Init\] Video mode: HD1080@15
\[component_container_isolated-2\] \[2025-11-27 17:01:55 UTC\]\[ZED\]\[INFO\] \[Init\] Serial Number: S/N 31684450
\[component_container_isolated-2\] \[2025-11-27 17:01:55 UTC\]\[ZED\]\[INFO\] \[Init\] Depth mode: NEURAL LIGHT
\[component_container_isolated-2\] \[INFO\] \[1764259315.795695641\] \[zed.zed_node\]: \* ZED SDK running on GPU #0
\[component_container_isolated-2\] \[INFO\] \[1764259315.795742682\] \[zed.zed_node\]: \* Camera Model → ZED 2i
\[component_container_isolated-2\] \[INFO\] \[1764259315.795746339\] \[zed.zed_node\]: \* Serial Number → 31684450
\[component_container_isolated-2\] \[INFO\] \[1764259315.795798864\] \[zed.zed_node\]: \* Focal Length → 2.13224 mm
\[component_container_isolated-2\] \[INFO\] \[1764259315.795810255\] \[zed.zed_node\]: \* Input → USB
\[component_container_isolated-2\] \[INFO\] \[1764259315.795814170\] \[zed.zed_node\]: \* Camera FW Version → 1523
\[component_container_isolated-2\] \[INFO\] \[1764259315.795816789\] \[zed.zed_node\]: \* Sensors FW Version → 0
\[component_container_isolated-2\] \[INFO\] \[1764259315.795822028\] \[zed.zed_node\]: \* Camera grab size → 1920x1080
\[component_container_isolated-2\] \[INFO\] \[1764259315.795845848\] \[zed.zed_node\]: \* Color/Depth publishing size → 960x540
\[component_container_isolated-2\] \[INFO\] \[1764259315.795848242\] \[zed.zed_node\]: \* Point Cloud publishing size → 448x256
\[component_container_isolated-2\] \[INFO\] \[1764259315.795854285\] \[zed.zed_node\]: === TF FRAMES ===
\[component_container_isolated-2\] \[INFO\] \[1764259315.795856665\] \[zed.zed_node\]: \* Map → map
\[component_container_isolated-2\] \[INFO\] \[1764259315.795858822\] \[zed.zed_node\]: \* Odometry → odom
\[component_container_isolated-2\] \[INFO\] \[1764259315.795860654\] \[zed.zed_node\]: \* Base → zed_camera_link
\[component_container_isolated-2\] \[INFO\] \[1764259315.795862486\] \[zed.zed_node\]: \* Camera → zed_camera_center
\[component_container_isolated-2\] \[INFO\] \[1764259315.795864429\] \[zed.zed_node\]: \* Left → zed_left_camera_frame
\[component_container_isolated-2\] \[INFO\] \[1764259315.795866556\] \[zed.zed_node\]: \* Left Optical → zed_left_camera_frame_optical
\[component_container_isolated-2\] \[INFO\] \[1764259315.795868389\] \[zed.zed_node\]: \* Right → zed_right_camera_frame
\[component_container_isolated-2\] \[INFO\] \[1764259315.795871653\] \[zed.zed_node\]: \* Right Optical → zed_right_camera_frame_optical
\[component_container_isolated-2\] \[INFO\] \[1764259315.795873575\] \[zed.zed_node\]: \* Depth → zed_left_camera_frame
\[component_container_isolated-2\] \[INFO\] \[1764259315.795875239\] \[zed.zed_node\]: \* Depth Optical → zed_left_camera_frame_optical
\[component_container_isolated-2\] \[INFO\] \[1764259315.795876953\] \[zed.zed_node\]: \* Point Cloud → zed_left_camera_frame
\[component_container_isolated-2\] \[INFO\] \[1764259315.795878662\] \[zed.zed_node\]: \* IMU → zed_imu_link
\[component_container_isolated-2\] \[INFO\] \[1764259315.795880340\] \[zed.zed_node\]: \* Barometer → zed_camera_center
\[component_container_isolated-2\] \[INFO\] \[1764259315.795882043\] \[zed.zed_node\]: \* Magnetometer → zed_imu_link
\[component_container_isolated-2\] \[INFO\] \[1764259315.795883626\] \[zed.zed_node\]: \* Left Temperature → zed_left_camera_frame
\[component_container_isolated-2\] \[INFO\] \[1764259315.795885301\] \[zed.zed_node\]: \* Right Temperature → zed_right_camera_frame
\[component_container_isolated-2\] \[INFO\] \[1764259315.795895831\] \[zed.zed_node\]: === PUBLISHED TOPICS ===
\[component_container_isolated-2\] \[INFO\] \[1764259315.796484738\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/status/health
\[component_container_isolated-2\] \[INFO\] \[1764259315.796649569\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/status/heartbeat
\[component_container_isolated-2\] \[INFO\] \[1764259315.798289606\] \[NitrosContext\]: \[NitrosContext\] Loading extension: gxf/lib/std/libgxf_std.so
\[component_container_isolated-2\] \[INFO\] \[1764259315.798989030\] \[NitrosContext\]: \[NitrosContext\] Loading extension: gxf/lib/libgxf_isaac_gxf_helpers.so
\[component_container_isolated-2\] \[INFO\] \[1764259315.800203823\] \[NitrosContext\]: \[NitrosContext\] Loading extension: gxf/lib/libgxf_isaac_sight.so
\[component_container_isolated-2\] \[INFO\] \[1764259315.801504638\] \[NitrosContext\]: \[NitrosContext\] Loading extension: gxf/lib/libgxf_isaac_atlas.so
\[component_container_isolated-2\] 2025-11-27 17:01:55.805 WARN external/com_nvidia_gxf/gxf/std/program.cpp@538: No GXF scheduler specified.
\[component_container_isolated-2\] \[INFO\] \[1764259315.805249389\] \[NitrosContext\]: \[NitrosContext\] Loading extension: gxf/lib/multimedia/libgxf_multimedia.so
\[component_container_isolated-2\] \[INFO\] \[1764259315.806968660\] \[zed.zed_node.ManagedNitrosPublisher\]: Starting Managed Nitros Publisher
\[component_container_isolated-2\] \[INFO\] \[1764259315.806975515\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/rgb/color/rect/image
\[component_container_isolated-2\] \[INFO\] \[1764259315.806982251\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/rgb/color/rect/image/nitros
\[component_container_isolated-2\] \[INFO\] \[1764259315.807288073\] \[zed.zed_node.ManagedNitrosPublisher\]: Starting Managed Nitros Publisher
\[component_container_isolated-2\] \[INFO\] \[1764259315.807293048\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/depth/depth_registered
\[component_container_isolated-2\] \[INFO\] \[1764259315.807297202\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/depth/depth_registered/nitros
\[component_container_isolated-2\] \[INFO\] \[1764259315.807465749\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/rgb/color/rect/camera_info
\[component_container_isolated-2\] \[INFO\] \[1764259315.807519982\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/rgb/color/rect/image/camera_info
\[component_container_isolated-2\] \[INFO\] \[1764259315.807567735\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/depth/camera_info
\[component_container_isolated-2\] \[INFO\] \[1764259315.807614762\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/depth/depth_registered/camera_info
\[component_container_isolated-2\] \[INFO\] \[1764259315.807781002\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/point_cloud/cloud_registered
\[component_container_isolated-2\] \[INFO\] \[1764259315.807973792\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/pose
\[component_container_isolated-2\] \[INFO\] \[1764259315.808090568\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/pose/status
\[component_container_isolated-2\] \[INFO\] \[1764259315.808426879\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/odom
\[component_container_isolated-2\] \[INFO\] \[1764259315.808567044\] \[zed.zed_node\]: \* Advertised on topic: /zed/zed_node/imu/data
\[component_container_isolated-2\] \[INFO\] \[1764259315.808578361\] \[zed.zed_node\]: Camera-IMU Translation:
\[component_container_isolated-2\] 0 0 0
\[component_container_isolated-2\] \[INFO\] \[1764259315.808591647\] \[zed.zed_node\]: Camera-IMU Rotation:
\[component_container_isolated-2\] 7D209CA39D30
\[component_container_isolated-2\] 1.000000 0.000000 0.000000
\[component_container_isolated-2\] 0.000000 1.000000 0.000000
\[component_container_isolated-2\] 0.000000 0.000000 1.000000
\[component_container_isolated-2\]
\[component_container_isolated-2\] \[INFO\] \[1764259315.808603677\] \[zed.zed_node\]: ===Subscribers ===
\[component_container_isolated-2\] \[INFO\] \[1764259315.808748006\] \[zed.zed_node\]: \* Plane detection: ‘/clicked_point’
\[component_container_isolated-2\] \[INFO\] \[1764259315.865054702\] \[zed.zed_node\]: === Starting Positional Tracking ===
\[component_container_isolated-2\] \[INFO\] \[1764259315.865084525\] \[zed.zed_node\]: \* Waiting for valid static transformations…
\[component_container_isolated-2\] \[INFO\] \[1764259315.865137784\] \[zed.zed_node\]: Static transform ref. CMOS Sensor to Base \[zed_left_camera_frame → zed_camera_link\]
\[component_container_isolated-2\] \[INFO\] \[1764259315.865143072\] \[zed.zed_node\]: \* Translation: {0.010,-0.060,-0.015}
\[component_container_isolated-2\] \[INFO\] \[1764259315.865149973\] \[zed.zed_node\]: \* Rotation: {0.000,-0.000,0.000}
\[component_container_isolated-2\] \[INFO\] \[1764259315.865158629\] \[zed.zed_node\]: Static transform ref. CMOS Sensor to Camera Center \[zed_left_camera_frame → zed_camera_center\]
\[component_container_isolated-2\] \[INFO\] \[1764259315.865161420\] \[zed.zed_node\]: \* Translation: {0.010,-0.060,0.000}
\[component_container_isolated-2\] \[INFO\] \[1764259315.865164416\] \[zed.zed_node\]: \* Rotation: {0.000,-0.000,0.000}
\[component_container_isolated-2\] \[INFO\] \[1764259315.865170127\] \[zed.zed_node\]: Static transform Camera Center to Base \[zed_camera_center → zed_camera_link\]
\[component_container_isolated-2\] \[INFO\] \[1764259315.865172634\] \[zed.zed_node\]: \* Translation: {0.000,0.000,-0.015}
\[component_container_isolated-2\] \[INFO\] \[1764259315.865175340\] \[zed.zed_node\]: \* Rotation: {0.000,-0.000,0.000}
\[component_container_isolated-2\] \[INFO\] \[1764259315.866237049\] \[zed.zed_node\]: Initial ZED left camera pose (ZED pos. tracking):
\[component_container_isolated-2\] \[INFO\] \[1764259315.866240679\] \[zed.zed_node\]: \* T: \[-0.01,0.06,0.015\]
\[component_container_isolated-2\] \[INFO\] \[1764259315.866244145\] \[zed.zed_node\]: \* Q: \[0,0,0,1\]
\[component_container_isolated-2\] \[2025-11-27 17:01:55 UTC\]\[ZED\]\[WARNING\] \[Positional Tracking\] GEN 2 is deprecated; consider updating to a GEN 3 instead.
\[component_container_isolated-2\] \[2025-11-27 17:01:56 UTC\]\[ZED\]\[WARNING\] Frames may be corrupted or degraded
\[component_container_isolated-2\] \[2025-11-27 17:01:56 UTC\]\[ZED\]\[INFO\] CORRUPTED FRAME in sl::ERROR_CODE sl::camera::grab(sl::RuntimeParameters)
\[component_container_isolated-2\] \[WARN\] \[1764259316.696413351\] \[zed.zed_node\]: Grab status degraded: CORRUPTED FRAME
\[component_container_isolated-2\] \[2025-11-27 17:01:56 UTC\]\[ZED\]\[WARNING\] Frames may be corrupted or degraded
\[component_container_isolated-2\] \[2025-11-27 17:01:56 UTC\]\[ZED\]\[INFO\] CORRUPTED FRAME in sl::ERROR_CODE sl::camera::grab(sl::RuntimeParameters)
\[component_container_isolated-2\] \[WARN\] \[1764259316.761355738\] \[zed.zed_node\]: Grab status degraded: CORRUPTED FRAME
Myzhar
November 28, 2025, 8:34am
11
This is the expected output. The node is running.
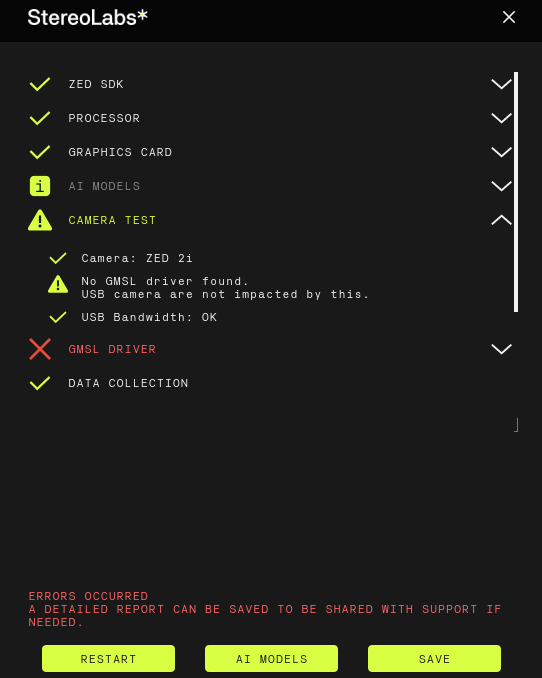
Please take a screenshot of the Diagnostic and share it.
The diagnostics is fine I just tested on the jetson. It is a matter of starting your node which blocks everything and does not accept request of ros2 topic echo etc.
I ran the Diagnostics on the Jetson
In this section we defnetly need the two terminals and echos which are actually blocked. Tutorial - AprilTag Detection with ZED and Isaac™ ROS - Stereolabs
I think that the basic docker setup of your package is not enough. Can you please check which options you have to switch on to be able to see everything. I printed everything out in the run_dev.sh
Actually with your description it is
docker run -it --rm nvidia.com/gpu=all,nvidia.com/pva=all
And I think that setup is not enough for Isaac Ros. What can I add and where? Actually the .isaac_ros_dev-dockerargs additional Dockerarguments are ignored when creating an extra file.
Giorgos
December 1, 2025, 8:30am
14
Hi DelwinPadilla ,
Can you double check that ROS_DOMAIN_ID is the same in both instances of the container? Maybe there was a sourcing of bashrc needed. Use
echo ${ROS_DOMAIN_ID}
1 Like
I checked that on my side and that was equal for both systems outside of the container and inside of the isaac ros container
root@agx:/workspaces/isaac_ros-dev# echo ${ROS_DOMAIN_ID}
That does not solve the issue so far
Today I saw this hint but I don’t know how to solve that. I think it has to do with the basic docker settings why isaac ros isn’t useable so far with ros2 in the container
mponents/lib/libzed_camera_component.so
Giorgos
December 1, 2025, 3:05pm
16
I had a similar issue with ros isaac packages not being built from the Docker, as described in the guide here . I don’t know the reason, but if I install them the same way with a script from within the container, it works :
sudo apt-get update && sudo apt-get install -y ros-humble-isaac-ros-common ros-humble-isaac-ros-nitros ros-humble-isaac-ros-managed-nitros ros-humble-isaac-ros-nitros-image-type
Does that work for you ?
1 Like
No that does not work on my side I had to add in the docker file
ENV ISAAC_GXF_LIB=/opt/ros/humble/share/gxf_isaac_optimizer/gxf/lib
RUN mkdir -p /etc/ld.so.conf.d &&
Then I can start the example node: ros2 launch zed_wrapper zed_camera.launch.py camera_model:=zed2i enable_ipc:=false
I can see also the Topics but when I do echo no matter what topic nothing is coming out of the cam
I think it has do do with the Docker settings. Which settings are you using?
Does that work on your side in the dockercontainer?
can you please check on your side in the first terminal 1:
source /opt/ros/humble/setup.bash
ros2 run demo_nodes_py talker
And on the second terminal in the docker
source /opt/ros/humble/setup.bash
ros2 run demo_nodes_py listener
ros2 topic echo /chatter
Even that chatter doesn’t give me an output. It must be a basic docker setting. Do you know which one?
I now found out the bug. The entry point script of the tutorial is totally wrong because it resets the docker main config which is necessary to get ros2 data. Actually it disables even ros2 multicast.
But now when I disable entrypoint in the run_dev.sh which is wrong explained in the documentation Tutorial - AprilTag Detection with ZED and Isaac™ ROS - Stereolabs The topic apritag_detect is on the commandline visible and ros2 topic echo works. But now whenever I start the cam AI-Models not only have to be loaded once. How can it be adjusted?
How can I visualize the detection in rviz like this? In rviz there is this topic not there. Tutorial - AprilTag Detection with ZED and Isaac™ ROS - Stereolabs
Myzhar
December 2, 2025, 11:01am
20
Please add details. What entry point script was wrong? Your custom entry point or the entry point described in the documentation?
This is simply a point cloud + TF visualisation, no specific settings are required.here ?