skl1g14
February 26, 2025, 7:11am
1
Hi,
I’ve recently been testing the latest SDK release, and I wanted to know what causes the difference. Here are the details when running the ROS2 wrapper on a Jetson Orin Nano with JP6.2 with a ZED2i camera:
[component_container_isolated-2] [INFO] [1740553119.887877848] [zed_node]: ZED SDK Version: 4.2.5 - Build 97569_fda16971
[component_container_isolated-2] [2025-02-26 06:58:39 UTC][ZED][INFO] Logging level INFO
[component_container_isolated-2] [INFO] [1740553119.892850659] [zed_node]: *** CAMERA OPENING ***
[component_container_isolated-2] [2025-02-26 06:58:40 UTC][ZED][INFO] Logging level INFO
[component_container_isolated-2] [2025-02-26 06:58:41 UTC][ZED][INFO] [Init] Depth mode: PERFORMANCE
[component_container_isolated-2] [2025-02-26 06:58:42 UTC][ZED][INFO] [Init] Camera successfully opened.
[component_container_isolated-2] [2025-02-26 06:58:42 UTC][ZED][INFO] [Init] Camera FW version: 1523
[component_container_isolated-2] [2025-02-26 06:58:42 UTC][ZED][INFO] [Init] Video mode: VGA@60
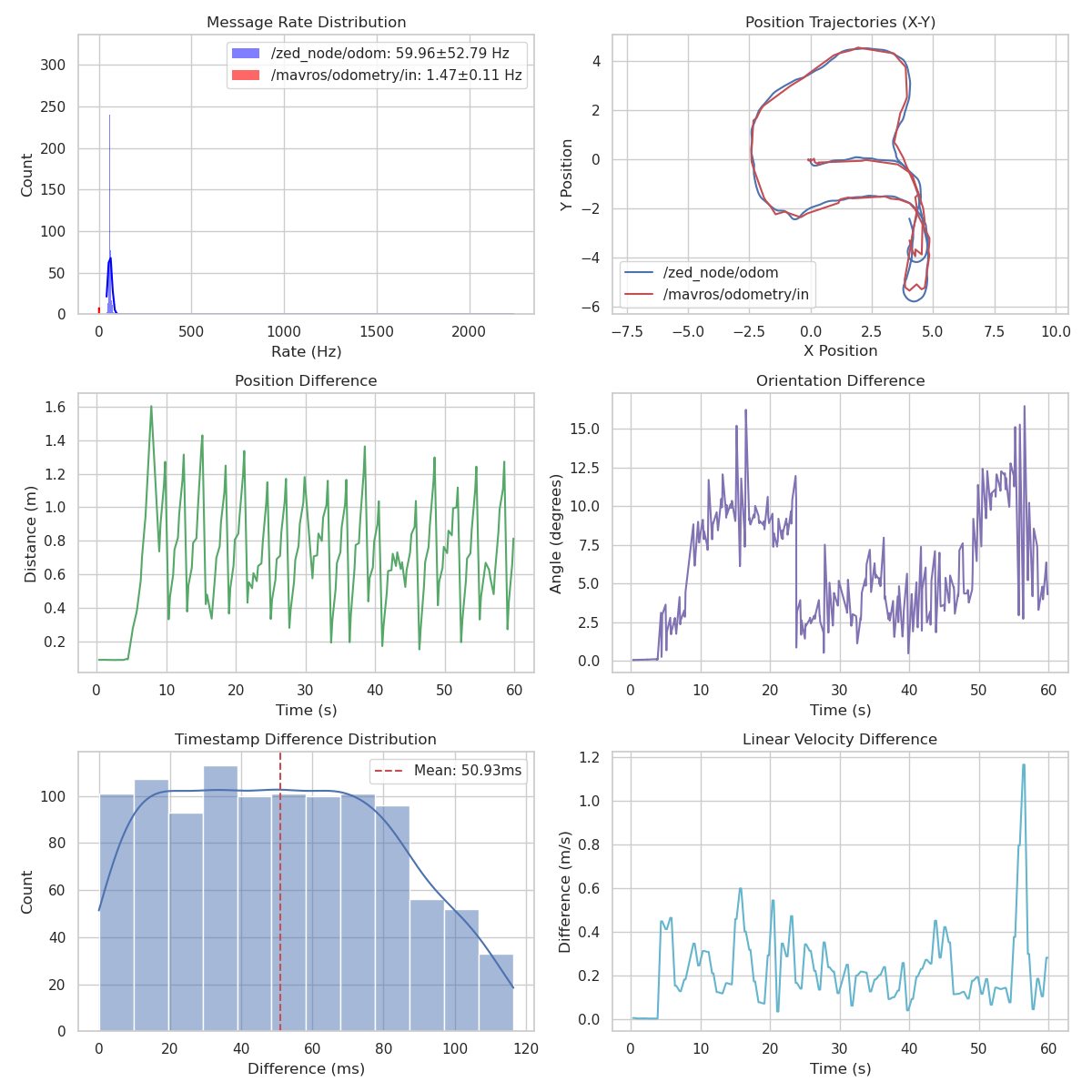
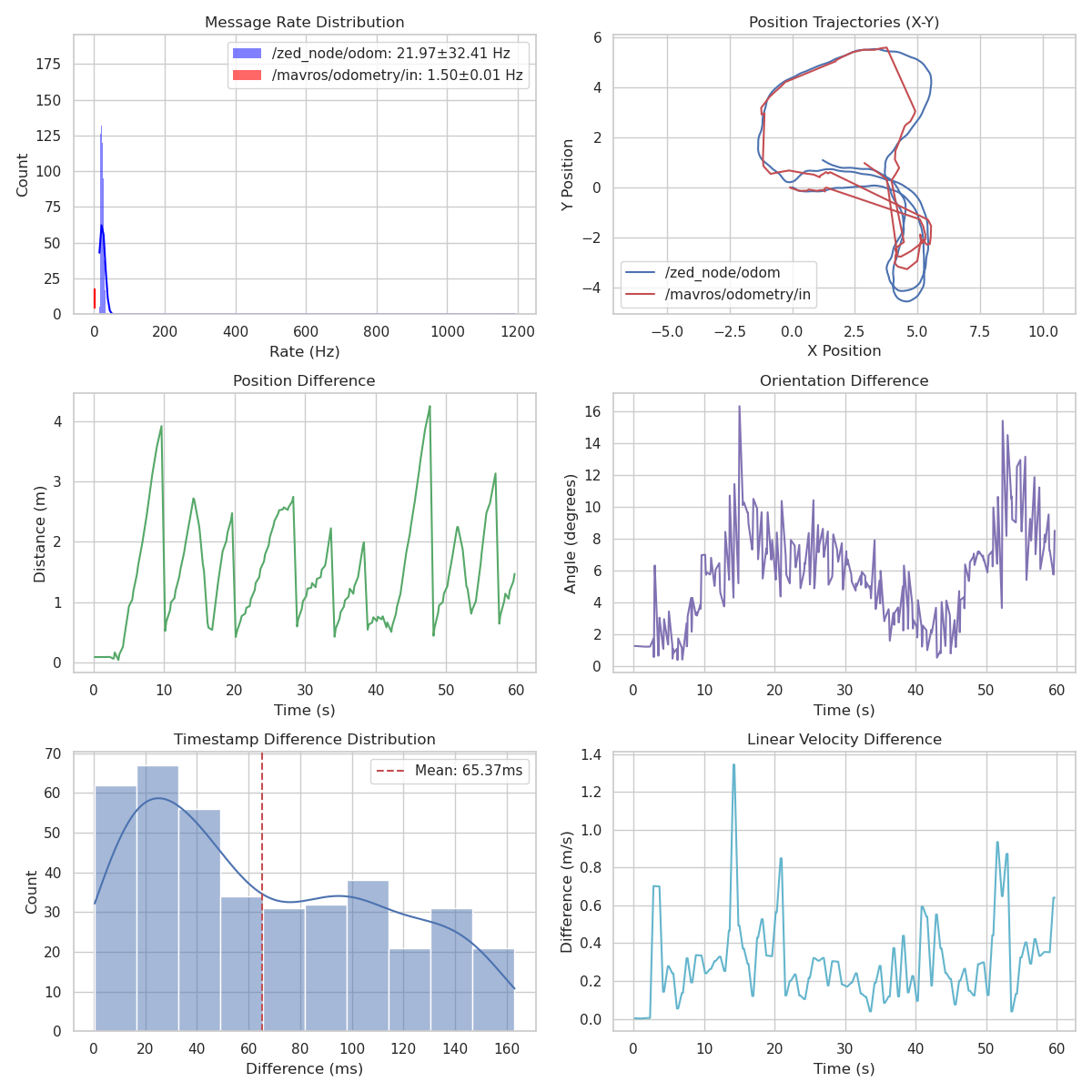
From the graphs, it appears that I’m getting a sub-20Hz odometry rate for GEN2 positional tracking, even though my camera’s grab rate is set to 60Hz. There doesn’t seem to be any issues with bandwidth or the power supply. I also enabled the light computation mode for GEN2, which improved the rate to around 50Hz, but there was no odometry output.
I ran the benchmark for zed-ros2-examples/tools/README.md at master · stereolabs/zed-ros2-examples · GitHub and it is consistent with my findings.
Myzhar
February 26, 2025, 3:00pm
2
Positional tracking GEN_2 is highly demanding in terms of computing requirements, so performance on Jetson Orin Nano may be reduced.
Can you share the common_stereo.yaml file and the full node log?
skl1g14
February 28, 2025, 3:03am
3
Following taken from fresh install of Jetpack and Zed SDK with only zed ros2 wrapper running.
common_stereo.yaml (17.6 KB)zed2i.yaml (495 Bytes)
skl1g14
February 28, 2025, 3:05am
4
logs output (split into 2 parts as body text limit reached)
ros2 launch zed_wrapper zed_camera.launch.py camera_model:=zed2i
[INFO] [launch]: All log files can be found below /home/nvidia/.ros/log/2025-02-28-10-35-27-874560-nvidia-53881
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [launch.user]: Using common configuration file: /home/nvidia/Desktop/colcon_ws/install/zed_wrapper/share/zed_wrapper/config/common_stereo.yaml
[INFO] [launch.user]: Using camera configuration file: /home/nvidia/Desktop/colcon_ws/install/zed_wrapper/share/zed_wrapper/config/zed2i.yaml
[INFO] [launch.user]: Using FFMPEG configuration file: /home/nvidia/Desktop/colcon_ws/install/zed_wrapper/share/zed_wrapper/config/ffmpeg.yaml
[INFO] [launch.user]: Loading ZED node `zed_node` in container `/zed/zed_container`
[INFO] [robot_state_publisher-1]: process started with pid [53904]
[INFO] [component_container_isolated-2]: process started with pid [53906]
[robot_state_publisher-1] [INFO] [1740710128.493221191] [zed.zed_state_publisher]: got segment zed_camera_center
[robot_state_publisher-1] [INFO] [1740710128.494484380] [zed.zed_state_publisher]: got segment zed_camera_link
[robot_state_publisher-1] [INFO] [1740710128.494515232] [zed.zed_state_publisher]: got segment zed_left_camera_frame
[robot_state_publisher-1] [INFO] [1740710128.494528993] [zed.zed_state_publisher]: got segment zed_left_camera_optical_frame
[robot_state_publisher-1] [INFO] [1740710128.494539010] [zed.zed_state_publisher]: got segment zed_right_camera_frame
[robot_state_publisher-1] [INFO] [1740710128.494548099] [zed.zed_state_publisher]: got segment zed_right_camera_optical_frame
[component_container_isolated-2] [INFO] [1740710128.694596188] [zed.zed_container]: Load Library: /home/nvidia/Desktop/colcon_ws/install/zed_components/lib/libzed_camera_component.so
[component_container_isolated-2] [INFO] [1740710128.782168735] [zed.zed_container]: Found class: rclcpp_components::NodeFactoryTemplate<stereolabs::ZedCamera>
[component_container_isolated-2] [INFO] [1740710128.782312144] [zed.zed_container]: Instantiate class: rclcpp_components::NodeFactoryTemplate<stereolabs::ZedCamera>
[component_container_isolated-2] [INFO] [1740710128.876453336] [zed.zed_node]: ********************************
[INFO] [launch_ros.actions.load_composable_nodes]: Loaded node '/zed/zed_node' in container '/zed/zed_container'
[component_container_isolated-2] [INFO] [1740710128.876541954] [zed.zed_node]: ZED Camera Component
[component_container_isolated-2] [INFO] [1740710128.876557060] [zed.zed_node]: ********************************
[component_container_isolated-2] [INFO] [1740710128.876570309] [zed.zed_node]: * namespace: /zed
[component_container_isolated-2] [INFO] [1740710128.876582759] [zed.zed_node]: * node name: zed_node
[component_container_isolated-2] [INFO] [1740710128.876591336] [zed.zed_node]: ********************************
[component_container_isolated-2] [INFO] [1740710128.926892040] [zed.zed_node]: *** DEBUG parameters ***
[component_container_isolated-2] [INFO] [1740710128.927360575] [zed.zed_node]: * SDK Verbose: 1
[component_container_isolated-2] [INFO] [1740710128.927503088] [zed.zed_node]: * Debug Common: FALSE
[component_container_isolated-2] [INFO] [1740710128.927583353] [zed.zed_node]: * Debug Simulation: FALSE
[component_container_isolated-2] [INFO] [1740710128.927707432] [zed.zed_node]: * Debug Video/Depth: FALSE
[component_container_isolated-2] [INFO] [1740710128.927819093] [zed.zed_node]: * Debug Control settings: FALSE
[component_container_isolated-2] [INFO] [1740710128.927926850] [zed.zed_node]: * Debug Point Cloud: FALSE
[component_container_isolated-2] [INFO] [1740710128.928156509] [zed.zed_node]: * Debug GNSS: FALSE
[component_container_isolated-2] [INFO] [1740710128.928316111] [zed.zed_node]: * Debug Positional Tracking: FALSE
[component_container_isolated-2] [INFO] [1740710128.928426428] [zed.zed_node]: * Debug sensors: FALSE
[component_container_isolated-2] [INFO] [1740710128.928576462] [zed.zed_node]: * Debug Mapping: FALSE
[component_container_isolated-2] [INFO] [1740710128.928800264] [zed.zed_node]: * Debug Object Detection: FALSE
[component_container_isolated-2] [INFO] [1740710128.928934168] [zed.zed_node]: * Debug Body Tracking: TRUE
[component_container_isolated-2] [INFO] [1740710128.929060967] [zed.zed_node]: * Debug Streaming: FALSE
[component_container_isolated-2] [INFO] [1740710128.929193047] [zed.zed_node]: * Debug ROI: FALSE
[component_container_isolated-2] [INFO] [1740710128.929356970] [zed.zed_node]: * Debug Advanced: FALSE
[component_container_isolated-2] [INFO] [1740710128.929729014] [zed.zed_node]: + Debug Mode enabled +
[component_container_isolated-2] [INFO] [1740710128.929908939] [zed.zed_node]: *** GENERAL parameters ***
[component_container_isolated-2] [INFO] [1740710128.930472461] [zed.zed_node]: * Camera model: zed2i - ZED 2i
[component_container_isolated-2] [INFO] [1740710128.930608349] [zed.zed_node]: * Camera name: zed
[component_container_isolated-2] [INFO] [1740710128.930734252] [zed.zed_node]: * Camera SN: 0
[component_container_isolated-2] [INFO] [1740710128.930824343] [zed.zed_node]: * Camera ID: -1
[component_container_isolated-2] [INFO] [1740710128.930938756] [zed.zed_node]: * Camera timeout [sec]: 5
[component_container_isolated-2] [INFO] [1740710128.931062547] [zed.zed_node]: * Camera reconnection temptatives: 5
[component_container_isolated-2] [INFO] [1740710128.931176736] [zed.zed_node]: * Camera framerate: 60
[component_container_isolated-2] [INFO] [1740710128.931295566] [zed.zed_node]: * GPU ID: -1
[component_container_isolated-2] [INFO] [1740710128.931390841] [zed.zed_node]: * Asynchronous image retrieval: FALSE
[component_container_isolated-2] [INFO] [1740710128.931571119] [zed.zed_node]: * Camera resolution: VGA
[component_container_isolated-2] [INFO] [1740710128.931694685] [zed.zed_node]: * Publishing resolution: NATIVE
[component_container_isolated-2] [INFO] [1740710128.931802602] [zed.zed_node]: * OpenCV custom calibration:
[component_container_isolated-2] [INFO] [1740710128.931933049] [zed.zed_node]: * Camera self calibration: TRUE
[component_container_isolated-2] [INFO] [1740710128.932079754] [zed.zed_node]: * Camera flip: FALSE
[component_container_isolated-2] [INFO] [1740710128.932248126] [zed.zed_node]: * [DYN] Publish framerate [Hz]: 60
[component_container_isolated-2] [INFO] [1740710128.932285987] [zed.zed_node]: *** VIDEO parameters ***
[component_container_isolated-2] [INFO] [1740710128.932388655] [zed.zed_node]: * [DYN] Brightness: 4
[component_container_isolated-2] [INFO] [1740710128.932642157] [zed.zed_node]: * [DYN] Contrast: 4
[component_container_isolated-2] [INFO] [1740710128.932786046] [zed.zed_node]: * [DYN] Hue: 0
[component_container_isolated-2] [INFO] [1740710128.932898347] [zed.zed_node]: * [DYN] Saturation: 4
[component_container_isolated-2] [INFO] [1740710128.932990582] [zed.zed_node]: * [DYN] Sharpness: 4
[component_container_isolated-2] [INFO] [1740710128.933077696] [zed.zed_node]: * [DYN] Gamma: 8
[component_container_isolated-2] [INFO] [1740710128.933162762] [zed.zed_node]: * [DYN] Auto Exposure/Gain: TRUE
[component_container_isolated-2] [INFO] [1740710128.933265238] [zed.zed_node]: * [DYN] Exposure: 80
[component_container_isolated-2] [INFO] [1740710128.933371234] [zed.zed_node]: * [DYN] Gain: 80
[component_container_isolated-2] [INFO] [1740710128.933463021] [zed.zed_node]: * [DYN] Auto White Balance: TRUE
[component_container_isolated-2] [INFO] [1740710128.933545015] [zed.zed_node]: * [DYN] White Balance Temperature: 42
[component_container_isolated-2] [INFO] [1740710128.933699337] [zed.zed_node]: *** DEPTH parameters ***
[component_container_isolated-2] [INFO] [1740710128.933854427] [zed.zed_node]: * Depth mode: PERFORMANCE [1]
[component_container_isolated-2] [INFO] [1740710128.934080726] [zed.zed_node]: * Min depth [m]: 0.3
[component_container_isolated-2] [INFO] [1740710128.934285774] [zed.zed_node]: * Max depth [m]: 10
[component_container_isolated-2] [INFO] [1740710128.934532939] [zed.zed_node]: * Depth Stabilization: 1
[component_container_isolated-2] [INFO] [1740710128.934700927] [zed.zed_node]: * OpenNI mode (16bit point cloud): TRUE
[component_container_isolated-2] [INFO] [1740710128.934839311] [zed.zed_node]: * [DYN] Point cloud rate [Hz]: 30
[component_container_isolated-2] [INFO] [1740710128.934981376] [zed.zed_node]: * Point cloud resolution: COMPACT
[component_container_isolated-2] [INFO] [1740710128.935086732] [zed.zed_node]: * [DYN] Depth Confidence: 50
[component_container_isolated-2] [INFO] [1740710128.935178167] [zed.zed_node]: * [DYN] Depth Texture Confidence: 100
[component_container_isolated-2] [INFO] [1740710128.935270946] [zed.zed_node]: * [DYN] Remove saturated areas: TRUE
[component_container_isolated-2] [INFO] [1740710128.935305382] [zed.zed_node]: *** GNSS FUSION parameters ***
[component_container_isolated-2] [INFO] [1740710128.935393488] [zed.zed_node]: * GNSS fusion enabled: FALSE
[component_container_isolated-2] [INFO] [1740710128.935425140] [zed.zed_node]: *** POSITIONAL TRACKING parameters ***
[component_container_isolated-2] [INFO] [1740710128.935525600] [zed.zed_node]: * Positional tracking enabled: TRUE
[component_container_isolated-2] [INFO] [1740710128.935634445] [zed.zed_node]: * Positional tracking mode: GEN 2
[component_container_isolated-2] [INFO] [1740710128.935737977] [zed.zed_node]: * Map frame id: map
[component_container_isolated-2] [INFO] [1740710128.935935344] [zed.zed_node]: * Odometry frame id: odom
[component_container_isolated-2] [INFO] [1740710128.936224882] [zed.zed_node]: * Broadcast Odometry TF: FALSE
[component_container_isolated-2] [INFO] [1740710128.936304892] [zed.zed_node]: * Broadcast Pose TF: FALSE
[component_container_isolated-2] [INFO] [1740710128.936490738] [zed.zed_node]: * [DYN] Depth minimum range: 0
[component_container_isolated-2] [INFO] [1740710128.936729006] [zed.zed_node]: * [DYN] TF timestamp offset: 0
[component_container_isolated-2] [INFO] [1740710128.936990156] [zed.zed_node]: * [DYN] Path publishing rate: 2
[component_container_isolated-2] [INFO] [1740710128.937155552] [zed.zed_node]: * Path history lenght: -1
[component_container_isolated-2] [INFO] [1740710128.937403261] [zed.zed_node]: * Initial pose: [0,0,0,0,0,0,]
[component_container_isolated-2] [INFO] [1740710128.937726531] [zed.zed_node]: * Area Memory: TRUE
[component_container_isolated-2] [INFO] [1740710128.937876117] [zed.zed_node]: * Area Memory DB:
[component_container_isolated-2] [INFO] [1740710128.937982689] [zed.zed_node]: * Camera is static: FALSE
[component_container_isolated-2] [INFO] [1740710128.938081005] [zed.zed_node]: * Gravity as origin [not for ZED]: TRUE
[component_container_isolated-2] [INFO] [1740710128.938174232] [zed.zed_node]: * IMU Fusion [not for ZED]: TRUE
[component_container_isolated-2] [INFO] [1740710128.938269763] [zed.zed_node]: * Floor Alignment: FALSE
[component_container_isolated-2] [INFO] [1740710128.938362734] [zed.zed_node]: * Reset Odometry with Loop Closure: TRUE
[component_container_isolated-2] [INFO] [1740710128.938451704] [zed.zed_node]: * 2D mode: FALSE
[component_container_isolated-2] [INFO] [1740710128.938488477] [zed.zed_node]: *** Region of Interest parameters ***
[component_container_isolated-2] [INFO] [1740710128.938609035] [zed.zed_node]: * Automatic ROI generation: FALSE
[component_container_isolated-2] [INFO] [1740710128.938829349] [zed.zed_node]: * Manual ROI polygon: []
[component_container_isolated-2] [INFO] [1740710128.938889356] [zed.zed_node]: *** SENSORS STACK parameters ***
[component_container_isolated-2] [INFO] [1740710128.938997113] [zed.zed_node]: * Broadcast IMU TF [not for ZED]: TRUE
[component_container_isolated-2] [INFO] [1740710128.939093252] [zed.zed_node]: * Sensors Camera Sync: FALSE
[component_container_isolated-2] [INFO] [1740710128.939191599] [zed.zed_node]: * Sensors publishing rate: 200 Hz
[component_container_isolated-2] [INFO] [1740710128.939264984] [zed.zed_node]: *** Spatial Mapping parameters ***
[component_container_isolated-2] [INFO] [1740710128.939487890] [zed.zed_node]: * Spatial Mapping Enabled: FALSE
[component_container_isolated-2] [INFO] [1740710128.939628099] [zed.zed_node]: * Spatial Mapping resolution [m]: 0.05
[component_container_isolated-2] [INFO] [1740710128.939805240] [zed.zed_node]: * 3D Max Mapping range [m]: 5
[component_container_isolated-2] [INFO] [1740710128.939932551] [zed.zed_node]: * Map publishing rate [Hz]: 1
[component_container_isolated-2] [INFO] [1740710128.940051797] [zed.zed_node]: * Clicked point topic: /clicked_point
[component_container_isolated-2] [INFO] [1740710128.940164962] [zed.zed_node]: * Plane Det. Max Dist. Thresh.: 0.15
[component_container_isolated-2] [INFO] [1740710128.940258733] [zed.zed_node]: * Plane Det. Normals Sim. Thresh.: 15
[component_container_isolated-2] [INFO] [1740710128.940295537] [zed.zed_node]: *** Object Det. parameters ***
[component_container_isolated-2] [INFO] [1740710128.940381563] [zed.zed_node]: * Object Det. enabled: FALSE
[component_container_isolated-2] [INFO] [1740710128.940534221] [zed.zed_node]: * Object Det. model: MULTI CLASS BOX FAST
[component_container_isolated-2] [INFO] [1740710128.940647515] [zed.zed_node]: * Object Det. allow reduced precision: TRUE
[component_container_isolated-2] [INFO] [1740710128.940737733] [zed.zed_node]: * Object Det. maximum range [m]: 20
[component_container_isolated-2] [INFO] [1740710128.940913434] [zed.zed_node]: * Object Det. min. confidence: 75
[component_container_isolated-2] [INFO] [1740710128.941002021] [zed.zed_node]: * Object Det. prediction timeout [sec]: 0.5
[component_container_isolated-2] [INFO] [1740710128.941095087] [zed.zed_node]: * Object Det. tracking: TRUE
[component_container_isolated-2] [INFO] [1740710128.941201020] [zed.zed_node]: * Object Filtering mode: 1 - NMS3D
[component_container_isolated-2] [INFO] [1740710128.941293191] [zed.zed_node]: * MultiClassBox people: TRUE
[component_container_isolated-2] [INFO] [1740710128.941364815] [zed.zed_node]: * MultiClassBox vehicles: TRUE
[component_container_isolated-2] [INFO] [1740710128.941436408] [zed.zed_node]: * MultiClassBox bags: TRUE
[component_container_isolated-2] [INFO] [1740710128.941519777] [zed.zed_node]: * MultiClassBox animals: TRUE
[component_container_isolated-2] [INFO] [1740710128.941592554] [zed.zed_node]: * MultiClassBox electronics: TRUE
[component_container_isolated-2] [INFO] [1740710128.941772287] [zed.zed_node]: * MultiClassBox fruits and vegetables: TRUE
[component_container_isolated-2] [INFO] [1740710128.941924817] [zed.zed_node]: * MultiClassBox sport-related objects: TRUE
[component_container_isolated-2] [INFO] [1740710128.941961717] [zed.zed_node]: *** Body Track. parameters ***
[component_container_isolated-2] [INFO] [1740710128.942063297] [zed.zed_node]: * Body Track. enabled: FALSE
[component_container_isolated-2] [INFO] [1740710128.942215027] [zed.zed_node]: * Body Track. model: HUMAN BODY MEDIUM
[component_container_isolated-2] [INFO] [1740710128.942351491] [zed.zed_node]: * Body Track. format: BODY 38
[component_container_isolated-2] [INFO] [1740710128.942448783] [zed.zed_node]: * Body Track. allow reduced precision: TRUE
[component_container_isolated-2] [INFO] [1740710128.942544250] [zed.zed_node]: * Body Track. maximum range [m]: 20
[component_container_isolated-2] [INFO] [1740710128.942625892] [zed.zed_node]: * Body Track. KP selection: FULL
[component_container_isolated-2] [DEBUG] [1740710128.942653095] [zed.zed_node]: body_selection.body_kp_selection: FULL
[component_container_isolated-2] [DEBUG] [1740710128.942690059] [zed.zed_node]: Comparing 'FULL' to 'FULL'
[component_container_isolated-2] [INFO] [1740710128.942772213] [zed.zed_node]: * Body fitting: FALSE
[component_container_isolated-2] [INFO] [1740710128.942874913] [zed.zed_node]: * Body joints tracking: TRUE
[component_container_isolated-2] [INFO] [1740710128.942999728] [zed.zed_node]: * Body Track. prediction timeout [sec]: 0.5
[component_container_isolated-2] [INFO] [1740710128.943105020] [zed.zed_node]: * Body Track. confidence thresh.: 50
[component_container_isolated-2] [INFO] [1740710128.943199495] [zed.zed_node]: * Body Track. min. KP thresh.: 5
[component_container_isolated-2] [INFO] [1740710128.943235691] [zed.zed_node]: *** Streaming Server parameters ***
[component_container_isolated-2] [INFO] [1740710128.943326422] [zed.zed_node]: * Streaming Server enabled: FALSE
[component_container_isolated-2] [INFO] [1740710128.943419905] [zed.zed_node]: * Stream codec: H264
[component_container_isolated-2] [INFO] [1740710128.943506187] [zed.zed_node]: * Stream port: 30000
[component_container_isolated-2] [INFO] [1740710128.943607319] [zed.zed_node]: * Stream bitrate: 12500
[component_container_isolated-2] [INFO] [1740710128.943703106] [zed.zed_node]: * Stream GOP size: -1
[component_container_isolated-2] [INFO] [1740710128.943794989] [zed.zed_node]: * Stream Chunk size: 16084
[component_container_isolated-2] [INFO] [1740710128.943888760] [zed.zed_node]: * Adaptive bitrate: FALSE
[component_container_isolated-2] [INFO] [1740710128.944196476] [zed.zed_node]: * Target frame rate:0
[component_container_isolated-2] [INFO] [1740710128.944300233] [zed.zed_node]: *** Advanced parameters ***
[component_container_isolated-2] [INFO] [1740710128.945866497] [zed.zed_node]: * Thread sched. policy: SCHED_BATCH
[component_container_isolated-2] [INFO] [1740710128.946699683] [zed.zed_node]: *** SERVICES ***
[component_container_isolated-2] [INFO] [1740710128.952803922] [zed.zed_node]: * '/zed/zed_node/reset_odometry'
[component_container_isolated-2] [INFO] [1740710128.955036536] [zed.zed_node]: * '/zed/zed_node/reset_pos_tracking'
[component_container_isolated-2] [INFO] [1740710128.958154567] [zed.zed_node]: * '/zed/zed_node/set_pose'
[component_container_isolated-2] [INFO] [1740710128.959408731] [zed.zed_node]: * '/zed/zed_node/enable_obj_det'
[component_container_isolated-2] [INFO] [1740710128.960361035] [zed.zed_node]: * '/zed/zed_node/enable_body_trk'
[component_container_isolated-2] [INFO] [1740710128.961299321] [zed.zed_node]: * '/zed/zed_node/enable_mapping'
[component_container_isolated-2] [INFO] [1740710128.963668048] [zed.zed_node]: * '/zed/zed_node/enable_streaming'
[component_container_isolated-2] [INFO] [1740710128.966163478] [zed.zed_node]: * '/zed/zed_node/start_svo_rec'
[component_container_isolated-2] [INFO] [1740710128.967980812] [zed.zed_node]: * '/zed/zed_node/stop_svo_rec'
[component_container_isolated-2] [INFO] [1740710128.970050943] [zed.zed_node]: * '/zed/zed_node/set_roi'
[component_container_isolated-2] [INFO] [1740710128.971695489] [zed.zed_node]: * '/zed/zed_node/reset_roi'
[component_container_isolated-2] [INFO] [1740710128.971808110] [zed.zed_node]: ***** STARTING CAMERA *****
[component_container_isolated-2] [INFO] [1740710129.103477553] [zed.zed_node]: ZED SDK Version: 4.2.5 - Build 97569_fda16971
[component_container_isolated-2] [2025-02-28 02:35:29 UTC][ZED][INFO] Logging level INFO
[component_container_isolated-2] [INFO] [1740710129.115904035]
skl1g14
February 28, 2025, 3:05am
5
[zed.zed_node]: *** CAMERA OPENING ***
[component_container_isolated-2] [2025-02-28 02:35:29 UTC][ZED][INFO] Logging level INFO
[component_container_isolated-2] [2025-02-28 02:35:30 UTC][ZED][INFO] [Init] Depth mode: PERFORMANCE
[component_container_isolated-2] [2025-02-28 02:35:31 UTC][ZED][INFO] [Init] Camera successfully opened.
[component_container_isolated-2] [2025-02-28 02:35:31 UTC][ZED][INFO] [Init] Camera FW version: 1523
[component_container_isolated-2] [2025-02-28 02:35:31 UTC][ZED][INFO] [Init] Video mode: VGA@60
[component_container_isolated-2] [2025-02-28 02:35:31 UTC][ZED][INFO] [Init] Serial Number: S/N 31384613
[component_container_isolated-2] [INFO] [1740710131.505042597] [zed.zed_node]: ZED SDK running on GPU #0
[component_container_isolated-2] [INFO] [1740710131.505225275] [zed.zed_node]: * Camera Model -> ZED 2i
[component_container_isolated-2] [INFO] [1740710131.505259903] [zed.zed_node]: * Serial Number -> 31384613
[component_container_isolated-2] [INFO] [1740710131.505390702] [zed.zed_node]: * Focal Lenght -> 2.0735 mm
[component_container_isolated-2] [INFO] [1740710131.505446132] [zed.zed_node]: * Input -> USB
[component_container_isolated-2] [INFO] [1740710131.505486041] [zed.zed_node]: * Camera FW Version -> 1523
[component_container_isolated-2] [INFO] [1740710131.505526686] [zed.zed_node]: * Sensors FW Version -> 777
[component_container_isolated-2] [INFO] [1740710131.505556417] [zed.zed_node]: * Camera grab size -> 672x376
[component_container_isolated-2] [INFO] [1740710131.505573955] [zed.zed_node]: * Color/Depth publishing size -> 672x376
[component_container_isolated-2] [INFO] [1740710131.505590149] [zed.zed_node]: * Point Cloud publishing size -> 448x256
[component_container_isolated-2] [INFO] [1740710131.505631914] [zed.zed_node]: *** TF FRAMES ***
[component_container_isolated-2] [INFO] [1740710131.505650220] [zed.zed_node]: * Map -> map
[component_container_isolated-2] [INFO] [1740710131.505664110] [zed.zed_node]: * Odometry -> odom
[component_container_isolated-2] [INFO] [1740710131.505677903] [zed.zed_node]: * Base -> zed_camera_link
[component_container_isolated-2] [INFO] [1740710131.505691601] [zed.zed_node]: * Camera -> zed_camera_center
[component_container_isolated-2] [INFO] [1740710131.505705074] [zed.zed_node]: * Left -> zed_left_camera_frame
[component_container_isolated-2] [INFO] [1740710131.505755416] [zed.zed_node]: * Left Optical -> zed_left_camera_optical_frame
[component_container_isolated-2] [INFO] [1740710131.505773723] [zed.zed_node]: * RGB -> zed_left_camera_frame
[component_container_isolated-2] [INFO] [1740710131.505789276] [zed.zed_node]: * RGB Optical -> zed_left_camera_optical_frame
[component_container_isolated-2] [INFO] [1740710131.505803998] [zed.zed_node]: * Right -> zed_right_camera_frame
[component_container_isolated-2] [INFO] [1740710131.505817568] [zed.zed_node]: * Right Optical -> zed_right_camera_optical_frame
[component_container_isolated-2] [INFO] [1740710131.505831361] [zed.zed_node]: * Depth -> zed_left_camera_frame
[component_container_isolated-2] [INFO] [1740710131.505844515] [zed.zed_node]: * Depth Optical -> zed_left_camera_optical_frame
[component_container_isolated-2] [INFO] [1740710131.505858404] [zed.zed_node]: * Point Cloud -> zed_left_camera_optical_frame
[component_container_isolated-2] [INFO] [1740710131.505871910] [zed.zed_node]: * Disparity -> zed_left_camera_frame
[component_container_isolated-2] [INFO] [1740710131.505886120] [zed.zed_node]: * Disparity Optical -> zed_left_camera_optical_frame
[component_container_isolated-2] [INFO] [1740710131.505899945] [zed.zed_node]: * Confidence -> zed_left_camera_frame
[component_container_isolated-2] [INFO] [1740710131.505913163] [zed.zed_node]: * Confidence Optical -> zed_left_camera_optical_frame
[component_container_isolated-2] [INFO] [1740710131.505937454] [zed.zed_node]: * IMU -> zed_imu_link
[component_container_isolated-2] [INFO] [1740710131.505959024] [zed.zed_node]: * Barometer -> zed_camera_center
[component_container_isolated-2] [INFO] [1740710131.505974386] [zed.zed_node]: * Magnetometer -> zed_imu_link
[component_container_isolated-2] [INFO] [1740710131.505988308] [zed.zed_node]: * Left Temperature -> zed_left_camera_frame
[component_container_isolated-2] [INFO] [1740710131.506001717] [zed.zed_node]: * Right Temperature -> zed_right_camera_frame
[component_container_isolated-2] [INFO] [1740710131.506069309] [zed.zed_node]: *** PUBLISHED TOPICS ***
[component_container_isolated-2] [INFO] [1740710131.506107617] [zed.zed_node]: Openni depth mode activated -> Units: mm, Encoding: MONO16
[component_container_isolated-2] [DEBUG] [1740710131.676881379] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/rgb/image_rect_color/compressed
[component_container_isolated-2] [DEBUG] [1740710131.687436113] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/rgb/image_rect_color/compressedDepth
[component_container_isolated-2] [INFO] [1740710131.732790551] [FFMPEGEncoder]: enc: libx264 prof: preset:
[component_container_isolated-2] [INFO] [1740710131.732868192] [FFMPEGEncoder]: qmax: 0 bitrate: 4194304 gop: 10
[component_container_isolated-2] [DEBUG] [1740710131.733130399] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/rgb/image_rect_color/ffmpeg
[component_container_isolated-2] [DEBUG] [1740710131.737135090] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/rgb/image_rect_color
[component_container_isolated-2] [DEBUG] [1740710131.744454471] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/rgb/image_rect_color/theora
[component_container_isolated-2] [INFO] [1740710131.747804653] [zed.zed_node]: Advertised on topic: /zed/zed_node/rgb/image_rect_color
[component_container_isolated-2] [INFO] [1740710131.747891991] [zed.zed_node]: Advertised on topic: /zed/zed_node/rgb/camera_info
[component_container_isolated-2] [DEBUG] [1740710131.748300007] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/rgb_gray/image_rect_gray/compressed
[component_container_isolated-2] [DEBUG] [1740710131.749841339] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/rgb_gray/image_rect_gray/compressedDepth
[component_container_isolated-2] [INFO] [1740710131.750505320] [FFMPEGEncoder]: enc: libx264 prof: preset:
[component_container_isolated-2] [INFO] [1740710131.750541644] [FFMPEGEncoder]: qmax: 0 bitrate: 4194304 gop: 10
[component_container_isolated-2] [DEBUG] [1740710131.750557582] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/rgb_gray/image_rect_gray/ffmpeg
[component_container_isolated-2] [DEBUG] [1740710131.751087148] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/rgb_gray/image_rect_gray
[component_container_isolated-2] [DEBUG] [1740710131.751660143] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/rgb_gray/image_rect_gray/theora
[component_container_isolated-2] [INFO] [1740710131.754888423] [zed.zed_node]: Advertised on topic: /zed/zed_node/rgb_gray/image_rect_gray
[component_container_isolated-2] [INFO] [1740710131.754981618] [zed.zed_node]: Advertised on topic: /zed/zed_node/rgb_gray/camera_info
[component_container_isolated-2] [DEBUG] [1740710131.755363358] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/rgb_raw/image_raw_color/compressed
[component_container_isolated-2] [DEBUG] [1740710131.756742271] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/rgb_raw/image_raw_color/compressedDepth
[component_container_isolated-2] [INFO] [1740710131.757302976] [FFMPEGEncoder]: enc: libx264 prof: preset:
[component_container_isolated-2] [INFO] [1740710131.757335140] [FFMPEGEncoder]: qmax: 0 bitrate: 4194304 gop: 10
[component_container_isolated-2] [DEBUG] [1740710131.757351622] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/rgb_raw/image_raw_color/ffmpeg
[component_container_isolated-2] [DEBUG] [1740710131.757889253] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/rgb_raw/image_raw_color
[component_container_isolated-2] [DEBUG] [1740710131.758434500] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/rgb_raw/image_raw_color/theora
[component_container_isolated-2] [INFO] [1740710131.759349199] [zed.zed_node]: Advertised on topic: /zed/zed_node/rgb_raw/image_raw_color
[component_container_isolated-2] [INFO] [1740710131.759399829] [zed.zed_node]: Advertised on topic: /zed/zed_node/rgb_raw/camera_info
[component_container_isolated-2] [DEBUG] [1740710131.759707545] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/rgb_raw_gray/image_raw_gray/compressed
[component_container_isolated-2] [DEBUG] [1740710131.761033779] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/rgb_raw_gray/image_raw_gray/compressedDepth
[component_container_isolated-2] [INFO] [1740710131.761568562] [FFMPEGEncoder]: enc: libx264 prof: preset:
[component_container_isolated-2] [INFO] [1740710131.761599381] [FFMPEGEncoder]: qmax: 0 bitrate: 4194304 gop: 10
[component_container_isolated-2] [DEBUG] [1740710131.761614679] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/rgb_raw_gray/image_raw_gray/ffmpeg
[component_container_isolated-2] [DEBUG] [1740710131.762108913] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/rgb_raw_gray/image_raw_gray
[component_container_isolated-2] [DEBUG] [1740710131.762610731] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/rgb_raw_gray/image_raw_gray/theora
[component_container_isolated-2] [INFO] [1740710131.763524309] [zed.zed_node]: Advertised on topic: /zed/zed_node/rgb_raw_gray/image_raw_gray
[component_container_isolated-2] [INFO] [1740710131.763572507] [zed.zed_node]: Advertised on topic: /zed/zed_node/rgb_raw_gray/camera_info
[component_container_isolated-2] [DEBUG] [1740710131.763951079] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/left/image_rect_color/compressed
[component_container_isolated-2] [DEBUG] [1740710131.765330120] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/left/image_rect_color/compressedDepth
[component_container_isolated-2] [INFO] [1740710131.766009175] [FFMPEGEncoder]: enc: libx264 prof: preset:
[component_container_isolated-2] [INFO] [1740710131.766046908] [FFMPEGEncoder]: qmax: 0 bitrate: 4194304 gop: 10
[component_container_isolated-2] [DEBUG] [1740710131.766063645] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/left/image_rect_color/ffmpeg
[component_container_isolated-2] [DEBUG] [1740710131.766609693] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/left/image_rect_color
[component_container_isolated-2] [DEBUG] [1740710131.767152348] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/left/image_rect_color/theora
[component_container_isolated-2] [INFO] [1740710131.768111660] [zed.zed_node]: Advertised on topic: /zed/zed_node/left/image_rect_color
[component_container_isolated-2] [INFO] [1740710131.768159378] [zed.zed_node]: Advertised on topic: /zed/zed_node/left/camera_info
[component_container_isolated-2] [DEBUG] [1740710131.768461141] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/left_gray/image_rect_gray/compressed
[component_container_isolated-2] [DEBUG] [1740710131.769932032] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/left_gray/image_rect_gray/compressedDepth
[component_container_isolated-2] [INFO] [1740710131.770645332] [FFMPEGEncoder]: enc: libx264 prof: preset:
[component_container_isolated-2] [INFO] [1740710131.770686712] [FFMPEGEncoder]: qmax: 0 bitrate: 4194304 gop: 10
[component_container_isolated-2] [DEBUG] [1740710131.770700922] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/left_gray/image_rect_gray/ffmpeg
[component_container_isolated-2] [DEBUG] [1740710131.771258523] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/left_gray/image_rect_gray
[component_container_isolated-2] [DEBUG] [1740710131.771794745] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/left_gray/image_rect_gray/theora
[component_container_isolated-2] [INFO] [1740710131.772739400] [zed.zed_node]: Advertised on topic: /zed/zed_node/left_gray/image_rect_gray
[component_container_isolated-2] [INFO] [1740710131.772796974] [zed.zed_node]: Advertised on topic: /zed/zed_node/left_gray/camera_info
[component_container_isolated-2] [DEBUG] [1740710131.773097841] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/left_raw/image_raw_color/compressed
[component_container_isolated-2] [DEBUG] [1740710131.774408682] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/left_raw/image_raw_color/compressedDepth
[component_container_isolated-2] [INFO] [1740710131.774952938] [FFMPEGEncoder]: enc: libx264 prof: preset:
[component_container_isolated-2] [INFO] [1740710131.774985389] [FFMPEGEncoder]: qmax: 0 bitrate: 4194304 gop: 10
[component_container_isolated-2] [DEBUG] [1740710131.775000047] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/left_raw/image_raw_color/ffmpeg
[component_container_isolated-2] [DEBUG] [1740710131.775513867] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/left_raw/image_raw_color
[component_container_isolated-2] [DEBUG] [1740710131.776043913] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/left_raw/image_raw_color/theora
[component_container_isolated-2] [INFO] [1740710131.776985559] [zed.zed_node]: Advertised on topic: /zed/zed_node/left_raw/image_raw_color
[component_container_isolated-2] [INFO] [1740710131.777031324] [zed.zed_node]: Advertised on topic: /zed/zed_node/left_raw/camera_info
[component_container_isolated-2] [DEBUG] [1740710131.777310652] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/left_raw_gray/image_raw_gray/compressed
[component_container_isolated-2] [DEBUG] [1740710131.778677852] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/left_raw_gray/image_raw_gray/compressedDepth
[component_container_isolated-2] [INFO] [1740710131.779327495] [FFMPEGEncoder]: enc: libx264 prof: preset:
[component_container_isolated-2] [INFO] [1740710131.779367020] [FFMPEGEncoder]: qmax: 0 bitrate: 4194304 gop: 10
[component_container_isolated-2] [DEBUG] [1740710131.779382382] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/left_raw_gray/image_raw_gray/ffmpeg
[component_container_isolated-2] [DEBUG] [1740710131.779928462] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/left_raw_gray/image_raw_gray
[component_container_isolated-2] [DEBUG] [1740710131.780607837] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/left_raw_gray/image_raw_gray/theora
[component_container_isolated-2] [INFO] [1740710131.781588239] [zed.zed_node]: Advertised on topic: /zed/zed_node/left_raw_gray/image_raw_gray
[component_container_isolated-2] [INFO] [1740710131.781641973] [zed.zed_node]: Advertised on topic: /zed/zed_node/left_raw_gray/camera_info
[component_container_isolated-2] [DEBUG] [1740710131.781965947] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/right/image_rect_color/compressed
[component_container_isolated-2] [DEBUG] [1740710131.783329370] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/right/image_rect_color/compressedDepth
[component_container_isolated-2] [INFO] [1740710131.783978982] [FFMPEGEncoder]: enc: libx264 prof: preset:
[component_container_isolated-2] [INFO] [1740710131.784043341] [FFMPEGEncoder]: qmax: 0 bitrate: 4194304 gop: 10
[component_container_isolated-2] [DEBUG] [1740710131.784059311] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/right/image_rect_color/ffmpeg
[component_container_isolated-2] [DEBUG] [1740710131.784635186] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/right/image_rect_color
[component_container_isolated-2] [DEBUG] [1740710131.785189491] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/right/image_rect_color/theora
[component_container_isolated-2] [INFO] [1740710131.786356155] [zed.zed_node]: Advertised on topic: /zed/zed_node/right/image_rect_color
[component_container_isolated-2] [INFO] [1740710131.786418466] [zed.zed_node]: Advertised on topic: /zed/zed_node/right/camera_info
[component_container_isolated-2] [DEBUG] [1740710131.786773835] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/right_gray/image_rect_gray/compressed
[component_container_isolated-2] [DEBUG] [1740710131.788246423] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/right_gray/image_rect_gray/compressedDepth
[component_container_isolated-2] [INFO] [1740710131.788888322] [FFMPEGEncoder]: enc: libx264 prof: preset:
[component_container_isolated-2] [INFO] [1740710131.788929095] [FFMPEGEncoder]: qmax: 0 bitrate: 4194304 gop: 10
[component_container_isolated-2] [DEBUG] [1740710131.788944456] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/right_gray/image_rect_gray/ffmpeg
[component_container_isolated-2] [DEBUG] [1740710131.789564817] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/right_gray/image_rect_gray
[component_container_isolated-2] [DEBUG] [1740710131.790132851] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/right_gray/image_rect_gray/theora
[component_container_isolated-2] [INFO] [1740710131.791302843] [zed.zed_node]: Advertised on topic: /zed/zed_node/right_gray/image_rect_gray
[component_container_isolated-2] [INFO] [1740710131.791364963] [zed.zed_node]: Advertised on topic: /zed/zed_node/right_gray/camera_info
[component_container_isolated-2] [DEBUG] [1740710131.791717324] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/right_raw/image_raw_color/compressed
[component_container_isolated-2] [DEBUG] [1740710131.793153075] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/right_raw/image_raw_color/compressedDepth
[component_container_isolated-2] [INFO] [1740710131.793771323] [FFMPEGEncoder]: enc: libx264 prof: preset:
[component_container_isolated-2] [INFO] [1740710131.793814976] [FFMPEGEncoder]: qmax: 0 bitrate: 4194304 gop: 10
[component_container_isolated-2] [DEBUG] [1740710131.793831234] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/right_raw/image_raw_color/ffmpeg
[component_container_isolated-2] [DEBUG] [1740710131.794396644] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/right_raw/image_raw_color
[component_container_isolated-2] [DEBUG] [1740710131.794970567] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/right_raw/image_raw_color/theora
[component_container_isolated-2] [INFO] [1740710131.796509850] [zed.zed_node]: Advertised on topic: /zed/zed_node/right_raw/image_raw_color
[component_container_isolated-2] [INFO] [1740710131.796576482] [zed.zed_node]: Advertised on topic: /zed/zed_node/right_raw/camera_info
[component_container_isolated-2] [DEBUG] [1740710131.796914889] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/right_raw_gray/image_raw_gray/compressed
[component_container_isolated-2] [DEBUG] [1740710131.798319981] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/right_raw_gray/image_raw_gray/compressedDepth
[component_container_isolated-2] [INFO] [1740710131.799076869] [FFMPEGEncoder]: enc: libx264 prof: preset:
[component_container_isolated-2] [INFO] [1740710131.799121675] [FFMPEGEncoder]: qmax: 0 bitrate: 4194304 gop: 10
[component_container_isolated-2] [DEBUG] [1740710131.799136332] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/right_raw_gray/image_raw_gray/ffmpeg
[component_container_isolated-2] [DEBUG] [1740710131.799737074] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/right_raw_gray/image_raw_gray
[component_container_isolated-2] [DEBUG] [1740710131.800349082] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/right_raw_gray/image_raw_gray/theora
[component_container_isolated-2] [INFO] [1740710131.801479101] [zed.zed_node]: Advertised on topic: /zed/zed_node/right_raw_gray/image_raw_gray
[component_container_isolated-2] [INFO] [1740710131.801537860] [zed.zed_node]: Advertised on topic: /zed/zed_node/right_raw_gray/camera_info
[component_container_isolated-2] [DEBUG] [1740710131.801835335] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/depth/depth_registered/compressed
[component_container_isolated-2] [DEBUG] [1740710131.803339158] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/depth/depth_registered/compressedDepth
[component_container_isolated-2] [INFO] [1740710131.804136467] [FFMPEGEncoder]: enc: libx264 prof: preset:
[component_container_isolated-2] [INFO] [1740710131.804182969] [FFMPEGEncoder]: qmax: 0 bitrate: 4194304 gop: 10
[component_container_isolated-2] [DEBUG] [1740710131.804197178] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/depth/depth_registered/ffmpeg
[component_container_isolated-2] [DEBUG] [1740710131.804791360] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/depth/depth_registered
[component_container_isolated-2] [DEBUG] [1740710131.805362946] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/depth/depth_registered/theora
[component_container_isolated-2] [INFO] [1740710131.806440224] [zed.zed_node]: Advertised on topic: /zed/zed_node/depth/depth_registered
[component_container_isolated-2] [INFO] [1740710131.806492742] [zed.zed_node]: Advertised on topic: /zed/zed_node/depth/camera_info
[component_container_isolated-2] [INFO] [1740710131.809520167] [zed.zed_node]: Advertised on topic: /zed/zed_node/depth/depth_info
[component_container_isolated-2] [DEBUG] [1740710131.809922326] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/stereo/image_rect_color/compressed
[component_container_isolated-2] [DEBUG] [1740710131.811436230] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/stereo/image_rect_color/compressedDepth
[component_container_isolated-2] [INFO] [1740710131.812223426] [FFMPEGEncoder]: enc: libx264 prof: preset:
[component_container_isolated-2] [INFO] [1740710131.812268455] [FFMPEGEncoder]: qmax: 0 bitrate: 4194304 gop: 10
[component_container_isolated-2] [DEBUG] [1740710131.812283689]
[zed.zed_node]: getTopicToAdvertise: /zed/zed_node/stereo/image_rect_color/ffmpeg
[component_container_isolated-2] [DEBUG] [1740710131.812916275] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/stereo/image_rect_color
[component_container_isolated-2] [DEBUG] [1740710131.813518809] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/stereo/image_rect_color/theora
[component_container_isolated-2] [INFO] [1740710131.814817424] [zed.zed_node]: Advertised on topic: /zed/zed_node/stereo/image_rect_color
[component_container_isolated-2] [DEBUG] [1740710131.815215231] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/stereo_raw/image_raw_color/compressed
[component_container_isolated-2] [DEBUG] [1740710131.816739984] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/stereo_raw/image_raw_color/compressedDepth
[component_container_isolated-2] [INFO] [1740710131.817430177] [FFMPEGEncoder]: enc: libx264 prof: preset:
[component_container_isolated-2] [INFO] [1740710131.817469605] [FFMPEGEncoder]: qmax: 0 bitrate: 4194304 gop: 10
[component_container_isolated-2] [DEBUG] [1740710131.817485799] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/stereo_raw/image_raw_color/ffmpeg
[component_container_isolated-2] [DEBUG] [1740710131.818125522] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/stereo_raw/image_raw_color
[component_container_isolated-2] [DEBUG] [1740710131.819902785] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/stereo_raw/image_raw_color/theora
[component_container_isolated-2] [INFO] [1740710131.820684220] [zed.zed_node]: Advertised on topic: /zed/zed_node/stereo_raw/image_raw_color
[component_container_isolated-2] [INFO] [1740710131.821335112] [zed.zed_node]: Advertised on topic: /zed/zed_node/confidence/confidence_map
[component_container_isolated-2] [INFO] [1740710131.824367241] [zed.zed_node]: Advertised on topic: /zed/zed_node/disparity/disparity_image
[component_container_isolated-2] [DEBUG] [1740710131.828601527] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/point_cloud/cloud_registered/draco
[component_container_isolated-2] [DEBUG] [1740710131.837234885] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/point_cloud/cloud_registered
[component_container_isolated-2] [DEBUG] [1740710131.841466130] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/point_cloud/cloud_registered/zlib
[component_container_isolated-2] [DEBUG] [1740710131.845723234] [zed.zed_node]: getTopicToAdvertise: /zed/zed_node/point_cloud/cloud_registered/zstd
[component_container_isolated-2] [INFO] [1740710131.847709002] [zed.zed_node]: Advertised on topic: /zed/zed_node/point_cloud/cloud_registered
[component_container_isolated-2] [INFO] [1740710131.849732406] [zed.zed_node]: Advertised on topic: /zed/zed_node/pose
[component_container_isolated-2] [INFO] [1740710131.851413722] [zed.zed_node]: Advertised on topic: /zed/zed_node/pose/status
[component_container_isolated-2] [INFO] [1740710131.853298197] [zed.zed_node]: Advertised on topic: /zed/zed_node/pose_with_covariance
[component_container_isolated-2] [INFO] [1740710131.856196167] [zed.zed_node]: Advertised on topic: /zed/zed_node/odom
[component_container_isolated-2] [INFO] [1740710131.857950228] [zed.zed_node]: Advertised on topic: /zed/zed_node/path_map
[component_container_isolated-2] [INFO] [1740710131.859225256] [zed.zed_node]: Advertised on topic: /zed/zed_node/path_odom
[component_container_isolated-2] [INFO] [1740710131.864258643] [zed.zed_node]: Advertised on topic: /zed/plane_marker
[component_container_isolated-2] [INFO] [1740710131.867088733] [zed.zed_node]: Advertised on topic: /zed/plane
[component_container_isolated-2] [INFO] [1740710131.869044161] [zed.zed_node]: Advertised on topic: /zed/zed_node/imu/data
[component_container_isolated-2] [INFO] [1740710131.870547440] [zed.zed_node]: Advertised on topic: /zed/zed_node/imu/data_raw
[component_container_isolated-2] [INFO] [1740710131.872136713] [zed.zed_node]: Advertised on topic: /zed/zed_node/temperature/imu
[component_container_isolated-2] [INFO] [1740710131.873724994] [zed.zed_node]: Advertised on topic: /zed/zed_node/imu/mag
[component_container_isolated-2] [INFO] [1740710131.876487428] [zed.zed_node]: Advertised on topic: /zed/zed_node/atm_press
[component_container_isolated-2] [INFO] [1740710131.877810591] [zed.zed_node]: Advertised on topic: /zed/zed_node/temperature/left
[component_container_isolated-2] [INFO] [1740710131.879021356] [zed.zed_node]: Advertised on topic: /zed/zed_node/temperature/right
[component_container_isolated-2] [INFO] [1740710131.880539069] [zed.zed_node]: Advertised on topic: /zed/zed_node/left_cam_imu_transform
[component_container_isolated-2] [INFO] [1740710131.880637416] [zed.zed_node]: Camera-IMU Translation:
[component_container_isolated-2] -0.002 -0.023061 0.000217
[component_container_isolated-2] [INFO] [1740710131.880721362] [zed.zed_node]: Camera-IMU Rotation:
[component_container_isolated-2] FFFF759AC630
[component_container_isolated-2] 0.999932 0.011392 -0.002444
[component_container_isolated-2] -0.011409 0.999912 -0.006752
[component_container_isolated-2] 0.002367 0.006780 0.999974
Myzhar
February 28, 2025, 8:58am
6
A few advice for good settings when working with an Orin Nano:
reduce grab rate from 60 to 30 in zed2i.yaml
raise resolution to HD720 in zed2i.yaml
set pub_resolution to CUSTOM in common_stereo.yaml
set pub_downscale_factor to 2.0 in common_stereo.yaml
set enable_image_validity_check to 0 in common_stereo.yaml to not waste resources
set point_cloud_freq to 5 or 10 in common_stereo.yaml
set point_cloud_res to REDUCED in common_stereo.yaml
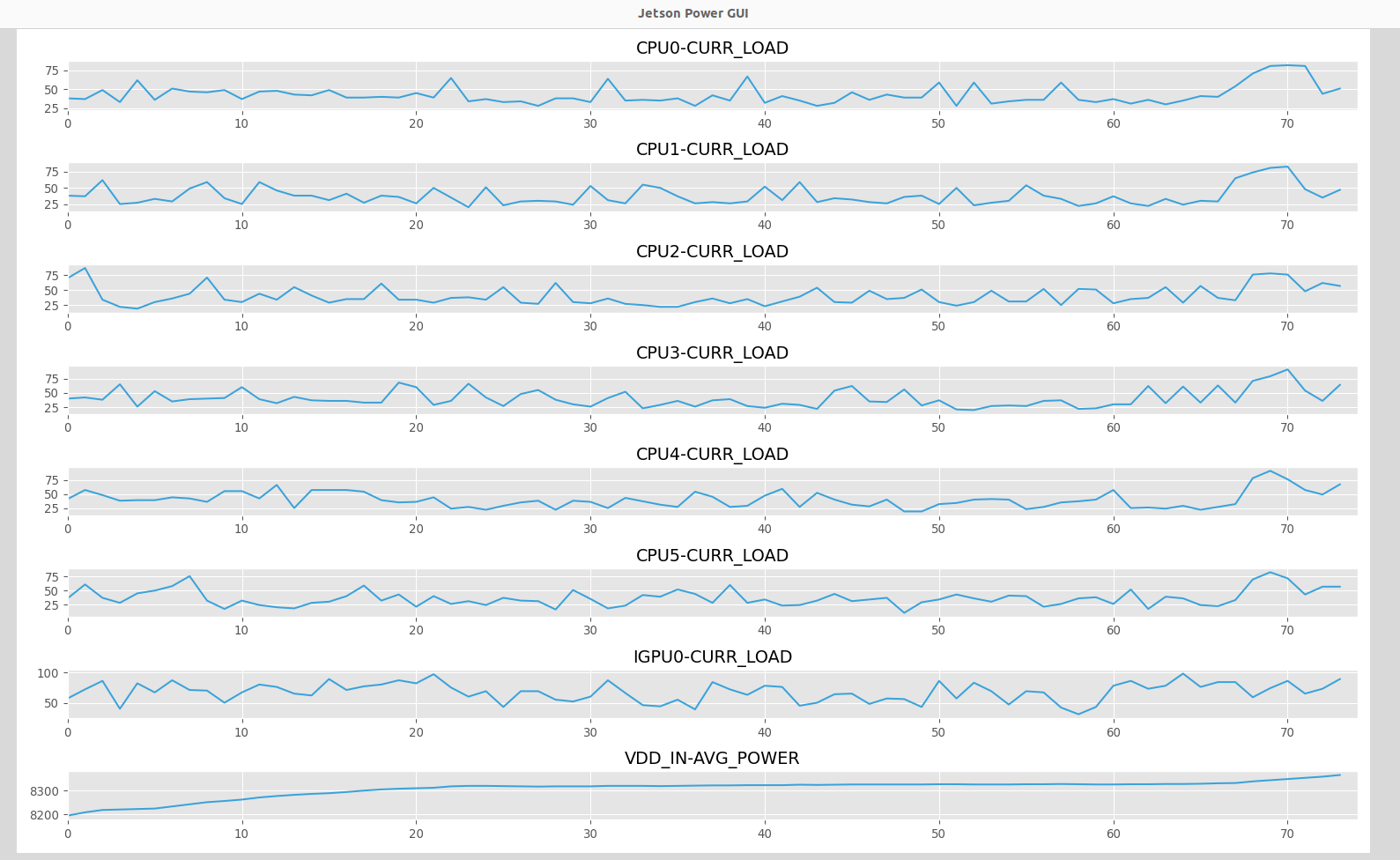
I recommend using MAXN power mode and running jetson_clocks to boost the Orin Nano performance.
Hey @skl1g14 ,
The plot that you shared is exactly what I looked to create.
Could you share me which tool or script did you use to create them?
Thanks!
Myzhar
March 27, 2025, 11:30am
8
It’s included in all the Jetpack by clicking on the power mode on the top right of the top bar
1 Like
Dear @ba2sakal ,
Short answer: python and matplotlib
If you are using ROS, you can just record a ROS bag.
You can check here for more details on how to plot the topics
Python package for the evaluation of odometry and SLAM
1 Like
This is perfect, thanks a lot!